Abstract:
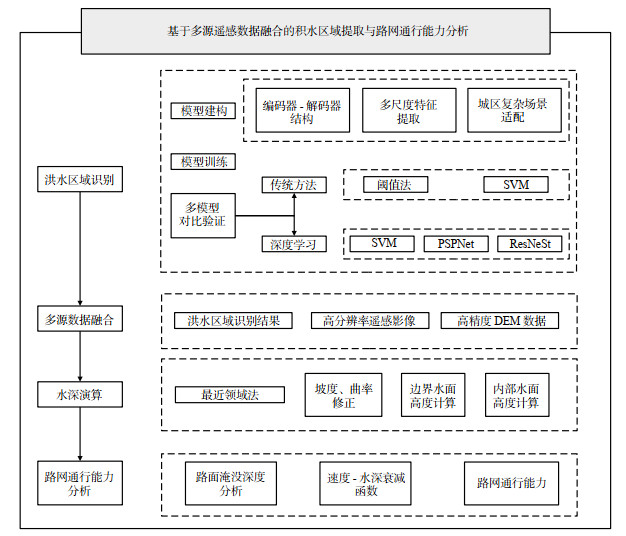
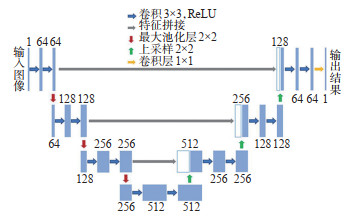
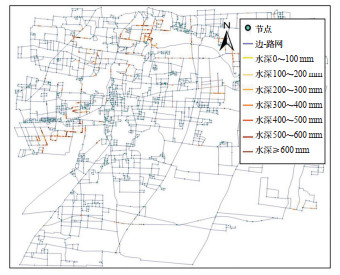
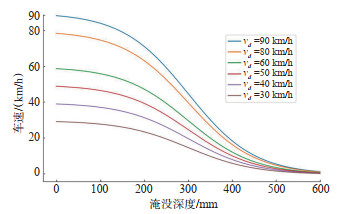
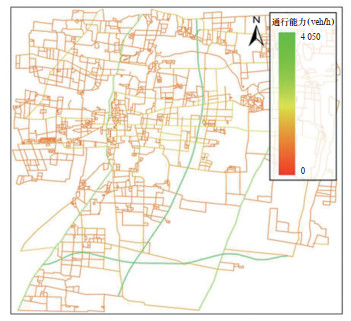
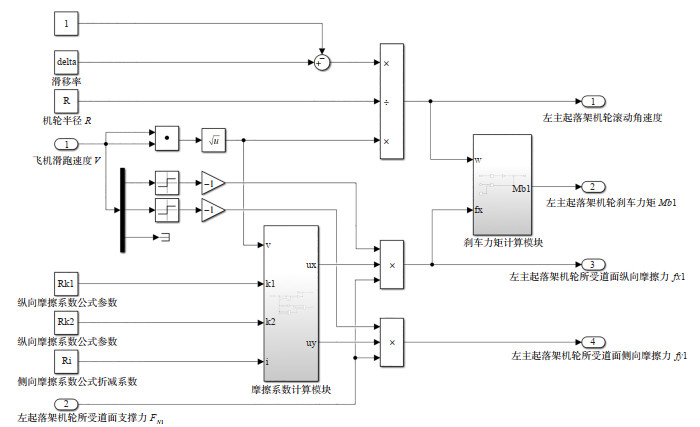
To address the challenge of accurately quantifying urban traffic risks during the dynamic progression of flood disasters, this study proposes a deep learning-based method for high-precision flood area extraction and analyzes the traffic capacity of urban roads during flooding through dynamic hydrodynamic simulations. A dynamic road network traffic assessment framework, encompassing flood detection, water depth calculation, and traffic capacity analysis, is established. This approach integrates synthetic aperture radar (SAR) imagery, optical imagery, and high-resolution digital elevation model (DEM) data, employing a U-Net deep learning model to precisely extract flood areas. By combining remote sensing data and geographic information, along with terrain factors such as slope and curvature, a flood water level boundary model is developed. The system utilizes real-time precipitation and land use information to drive dynamic water flow simulations, and integrates water depth change grids with vectorized road network data to estimate the inundation depth of different road types. A road topology structure and traffic capacity update mechanism are then established, including water depth and vehicle speed attenuation models for different road classes, quantifying the impact of water depth on traffic speed. Based on this model, multi-temporal traffic capacity change maps are generated, and complex network indicators are used to quantitatively assess road network connectivity. Results show that the method effectively addresses challenges such as shadow interference and building occlusion, significantly improving the accuracy of flood area segmentation. Specifically, the Intersection over Union (IoU) and F1 scores for flood area recognition achieved 97.56% and 97.79%, respectively, outperforming the support vector regression (SVR) model, with a 5% improvement across all metrics. The analysis indicates that, with a rainfall of 270.76 mm, the average water depth of internal roads and branches is significantly higher than that of arterial roads and highways. As water depth increases, the traffic speed of roads decreases by approximately 13.2%, with urban roads'traffic capacity reduced by an average of 13.2%. However, arterial roads maintain 83.3% of their traffic capacity, indicating their potential for emergency use. Furthermore, post-flood road network structure deteriorates significantly, with overall network connectivity decreasing by 58.2% compared to pre-flood conditions.