| Citation: | PEI Yulong, CHI Baiqiang, LYU Jingliang, YUE Zhikun. An Overview of Traffic Management in "Automatic+Manual" Driving Environment[J]. Journal of Transport Information and Safety, 2021, 39(5): 1-11. doi: 10.3963/j.jssn.1674-4861.2021.05.001

|
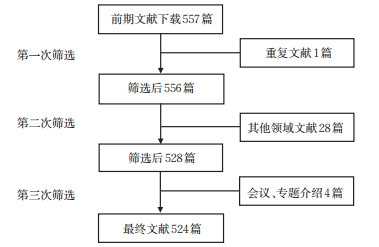
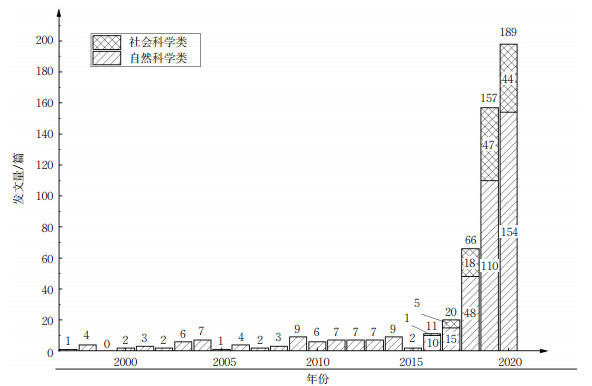
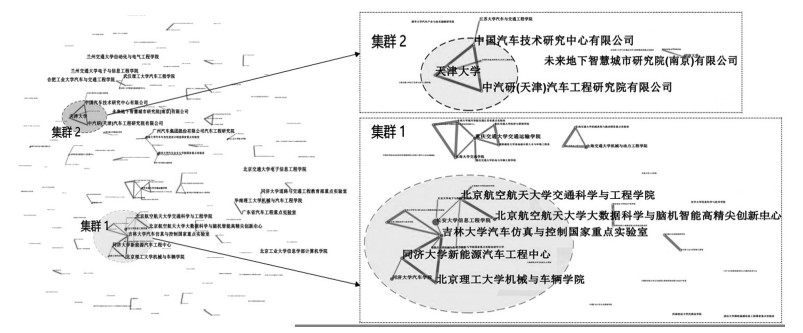
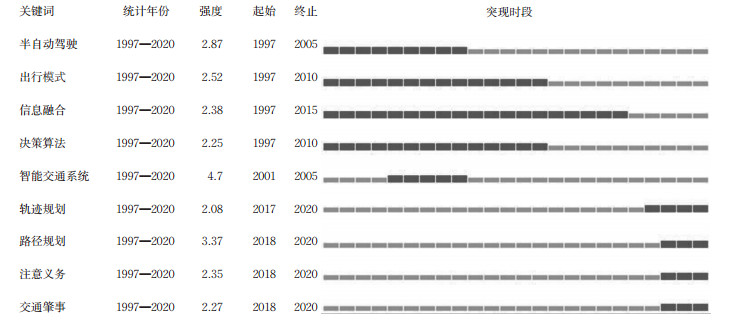
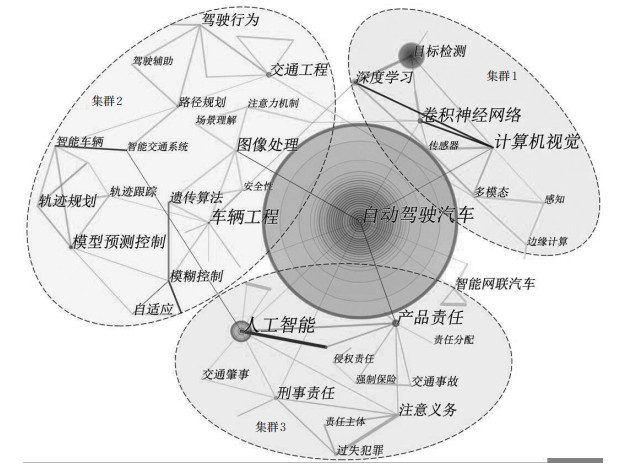
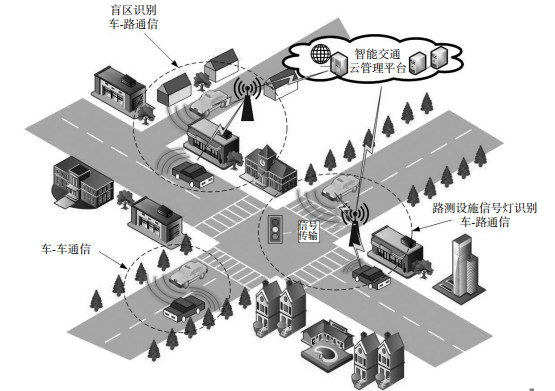
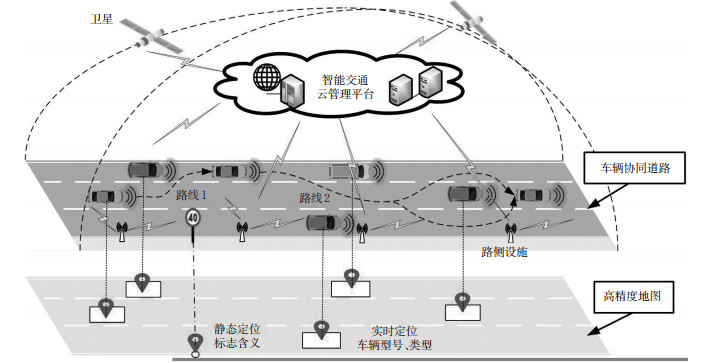
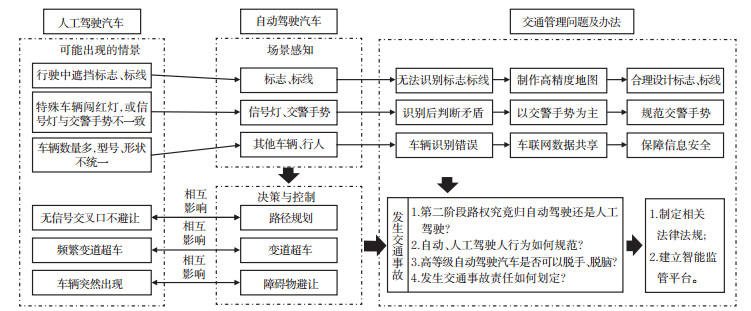
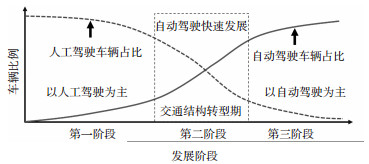
Based on the development status of "automatic driving vehicle", the problems existing in mixed driving environment of autopilot cars are analyzed to understand the current situations and development trends of traffic management in the mixed driving environment. In terms of the Citespace bibliometric tool, the CNKI core database in the past 24 years(1997—2020)is taken as the data source. The bibliometric and visual analysis are performed from publication year, journal source, research institution, and keywords, and network maps of relationships between research institutions and keyword co-occurrence is generated. The results show that the number of automatic driving documents has been increasing in China in recent 5 years. The journal with the most of related papers is China Journal of Highway and Transport. Its research directions of the automatic driving vehicles include: ①Research on target detection and scene perception. ②Research on decision making and control. ③Research on responsibility delineation of traffic accidents. In the future, for mixed driving environment, traffic management should combine vehicle-road coordination and high-precision map technology, study from the design of signs and markings, signal timing optimization, ownership of road rights, and the delineation of traffic accident responsibilities, thus making road transportation safe, efficient and convenient.

| [1] |
MONTANARO U, DIXIT S, FALLAH S, et al. Towards connect-ed autonomous driving: review of use-cases[J]. Vehicle System Dynamics, 2019, 57 (6): 779-814. doi: 10.1080/00423114.2018.1492142
|
| [2] |
KALRA N, PADDOCK S M. Driving to safety: How many miles of driving would it take to demonstrate autonomous vehicle reliability? [J]. Transportation Research Part A: Policy and Practice, 2016 (94) : 182-193.
|
| [3] |
张新钰, 高洪波, 赵建辉, 等. 基于深度学习的自动驾驶技术综述[J]. 清华大学学报(自然科学版), 2018, 58 (4): 438-444. https://www.cnki.com.cn/Article/CJFDTOTAL-QHXB201804017.htm
ZHANG Xinyu, GAO Hong, ZHAO Janhui, et al. Overview of deep learning intelligent driving methods[J]. Journal of Tsinghua University(Science and Technology), 2018, 58(4): 438-444. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-QHXB201804017.htm
|
| [4] |
朱冰, 张培兴, 赵健, 等. 基于场景的自动驾驶汽车虚拟测试研究进展[J]. 中国公路学报, 2019, 32 (6): 1-19.
ZHU Bing, ZHANG Peixing, ZHAO Jian, et al. Review of scenario-based virtual validation methods for automated vehicles[J]. China Journal of Highway and Transport, 2019, 32(6): 1-19. (in Chinese)
|
| [5] |
徐筱秦, 冯忠祥, 李靖宇. 驾驶员接管自动驾驶车辆研究进展[J]. 交通信息与安全, 2019, 37 (5): 1-8. doi: 10.3963/j.issn.1674-4861.2019.05.001
XU Xiaoqin, FENG Zhongxiang, LI Jingyu. A review of progresses on drivers'takeover behaviors of automatic vehicles[J]. Journal of Transport Information and Safety, 2019, 37(5): 1-8. (in Chinese) doi: 10.3963/j.issn.1674-4861.2019.05.001
|
| [6] |
CAO Jingwei, SONG Chuanxue, XIAO Feng, et al. Lane detection algorithm for intelligent vehicles in complex road conditions anddynamicenvironment[R/OL](. 2019-12)[2021-04-01]. https://www.webofscience.com/wos/alldb/full-record/WOS:000479160300133.
|
| [7] |
王海, 王宽, 蔡英凤, 等. 基于改进级联卷积神经网络的交通标志识别[J]. 汽车工程, 2020, 42 (9): 1256-1262+1269. https://www.cnki.com.cn/Article/CJFDTOTAL-QCGC202009016.htm
WANG Hai, WANG Kuan, CAI Yingfeng, et al. Traffic sign recognition based on improved cascade convolution neural network[J]. Automotive Engineering, 2020, 42(9): 1256-1262 + 1269. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-QCGC202009016.htm
|
| [8] |
YASSMINA S, ALI B. An overview of traffic sign detection and classification methods[J]. International Journal of Multimedia Information Retrieval, 2017, 6 (3): 193-210. doi: 10.1007/s13735-017-0129-8
|
| [9] |
王瑞军, 李斌, 应世杰, 等. 智能公路磁道钉编码差错控制技术研究[J]. 公路交通科技, 2008 (10): 134-139. doi: 10.3969/j.issn.1002-0268.2008.10.027
WANG Ruijun, LI Bin, YING Shijie, et al. Research on magnetic markers coding mistake control technology for intelligent highway system[J]. Journal of Highway and Transportation Research and Development, 2008 (10): 134-139. (in Chinese) doi: 10.3969/j.issn.1002-0268.2008.10.027
|
| [10] |
钱基德, 陈斌, 钱基业, 等. 基于感兴趣区域模型的车道线快速检测算法[J]. 电子科技大学学报, 2018, 47(3): 356-361. https://www.cnki.com.cn/Article/CJFDTOTAL-DKDX201803006.htm
QIAN Jide, CHEN Bin, QIAN Jiye, et al. Fast lane detection algorithm based on region of interest model[J]. Journal of University of Electronic Science and Technology of China, 2020, 47 (3): 356-361. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-DKDX201803006.htm
|
| [11] |
钟泽滨. 一种用于车道线识别的图像灰度化方法[J]. 同济大学学报(自然科学版), 2019, 47 (增刊1): 178-182. https://www.cnki.com.cn/Article/CJFDTOTAL-TJDZ2019S1033.htm
ZHONG Zebin. An image graying method for lane detection[J]. Journal of Tongji University(Natural Science), 2019, 47 (S1): 178-182. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-TJDZ2019S1033.htm
|
| [12] |
MAMMERI A, BOUKERCHE A, TANG Z Z. A real-time lane marking localization, tracking and communication system[J]. Computer Communications, 2015 (73) : 132-143.
|
| [13] |
OBRADOVIC D, KONJOVIC Z, PAP E, et al. Linear fuzzy space based road lane model and detection[J]. Knowledge-Based Systems, 2013, 38 (4): 37-47.
|
| [14] |
PARK H. Lane detection algorithm based on Hough transform for high-speed self driving vehicles[J]. International Journal of Web and Grid Services, 2019, 15 (3) : 240-250. doi: 10.1504/IJWGS.2019.10022421
|
| [15] |
PALAFOX P R, BETZ J, NOBIS F, et al. Semantic depth: fusing semantic segmentation and monocular depth estimation for enabling autonomous driving in roads without lane lines[R/OL].(2019-12)[2021-04-01]. https://www.webofscience.com/wos/alldb/full-record/WOS:000479160300191
|
| [16] |
LI Xi, MA Huimin, WANG Xiang, et al. Traffic light recognition for complex scene with fusion detections[J]. IEEE Transactions On Intelligent Transportation Systems, 2018, 19(1): 199-208. doi: 10.1109/TITS.2017.2749971
|
| [17] |
HAN Bing, WANG Yunhao, YANG Zheng, et al. Small-scale pedestrian detection based on deep neural network[J]. IEEE Transactions On Intelligent Transportation Systems, 2020, 21 (7): 3046-3055. doi: 10.1109/TITS.2019.2923752
|
| [18] |
WANG Xue. Moving vehicle detection and tracking based on video sequences[J]. Traitement Du Signal, 2020, 37(2): 325-331. doi: 10.18280/ts.370219
|
| [19] |
张丞, 何坚, 王伟东. 空间上下文与时序特征融合的交警指挥手势识别技术[J]. 电子学报, 2020, 48 (5): 966-974. doi: 10.3969/j.issn.0372-2112.2020.05.018
ZHANG Cheng, HE Jian, WANG Weidong. Visual recognition of chinese traffic police gestures based on spatial context and temporal features[J]. Acta Electronica Sinica, 2020, 48(5): 966-974. (in Chinese) doi: 10.3969/j.issn.0372-2112.2020.05.018
|
| [20] |
GUO Fan, TANG Jin, WANG Xile. Gesture recognition of traffic police based on static and dynamic descriptor fusion[J]. Pattern Analysis and Applications, 2017, 76 (6): 8915-8936.
|
| [21] |
HE Jian, ZHANG Cheng, HE Xinlin, et al. Visual recognition of traffic police gestures with convolutional pose machine and handcrafted features[J]. Neurocomputing, 2020 (390) : 248-259.
|
| [22] |
SUKUVAARA T, NURMI P. Wireless traffic service platform for combined vehicle-to-vehicle and vehicle-to-infrastructure communications[J]. IEEE Wireless Communications, 2009, 16 (6): 54-61. doi: 10.1109/MWC.2009.5361179
|
| [23] |
LIU Changhao, ZHANG Yixiao, ZHANG Tingting, et al. High throughput vehicle coordination strategies at road intersections[J]. IEEE Transactions on Vehicular Technology, 2020, 69 (12): 14341-14354. doi: 10.1109/TVT.2020.3029933
|
| [24] |
任永利, 董航瑞. 车路协同+自动驾驶助力郑州智慧岛交通强国示范[J]. 科技导报, 2020, 38 (9): 82-88. https://www.cnki.com.cn/Article/CJFDTOTAL-KJDB202009013.htm
REN Yongli, DONG Hangrui. To build a powerful transportation demonstration of China: Zhengzhou smart island with the help of vehicle-road coordination and self-driving[J]. Science & Technology Review, 2020, 38 (9): 82-88. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-KJDB202009013.htm
|
| [25] |
张家旭, 张振兆, 赵健, 等. 采用极点配置的自动驾驶汽车换道路径规划与跟踪控制[J]. 西安交通大学学报, 2020, 54 (10): 160-167. https://www.cnki.com.cn/Article/CJFDTOTAL-XAJT202010020.htm
ZHANG Jiaxu, ZHANG Zhenzhao, ZHAO Jian, et al. A path planning and tracking control method for lane changing of autonomous vehicle using pole assignment[J]. Journal of Xi'an Jiaotong University, 2020, 54 (10): 160-167. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-XAJT202010020.htm
|
| [26] |
WANG Lukun, ZHAO Xiaoying, SU Hao, et al. Lane changing trajectory planning and tracking control for intelligent vehicle on curved road[J]. Journal of Xi'an Jiaotong University, 2016, 5 (1): 1-18.
|
| [27] |
LI Xingyu, TANG Bo, Ball J, et al. Rollover-free path planning for off-road autonomous driving[J]. Electronics, 2019, 8 (6): 614. doi: 10.3390/electronics8060614
|
| [28] |
王鑫鹏, 陈志军, 吴超仲, 等. 考虑驾驶风格的智能车自主驾驶决策方法[J]. 交通信息与安全, 2020, 38 (2): 37-46. https://www.cnki.com.cn/Article/CJFDTOTAL-JTJS202002008.htm
WANG Xinpeng, CHEN Zhijun, WU Chaozhong, et al. A method of automatic driving decision for smart car considering driving style[J]. Journal of Transport Information and Safety, 2020, 38 (2): 37-46. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-JTJS202002008.htm
|
| [29] |
WANG Yulei, SHAO Qian, ZHOU Jian, et al. Longitudinal and lateral control of autonomous vehicles in multi-vehicle driving environments[J]. IET Intelligent Transport Systems, 2020, 14 (8): 924-935. doi: 10.1049/iet-its.2019.0846
|
| [30] |
周维, 过学迅, 裴晓飞, 等. 基于RRT与MPC的智能车辆路径规划与跟踪控制研究[J]. 汽车工程, 2020, 42(9): 1151-1158. https://www.cnki.com.cn/Article/CJFDTOTAL-QCGC202009002.htm
ZHOU We, GUO Xuexun, PEI Xiaofei, et al. Study on path planning and tracking control for intelligent vehicle based on RRT and MPC[J]. Automotive Engineering, 2020, 42(9): 1151-1158. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-QCGC202009002.htm
|
| [31] |
TAHIR Z, QURESHI AH, AYAZ Y, et al. Using artificial potential field theory for a cooperative control model in a connected and automated vehicles environment[J]. Transportation Research record, 2020, 2674 (9): 1005-1018. doi: 10.1177/0361198120933271
|
| [32] |
PRIMATESTA S, GUGLIERI G, RIZZO A. A risk-aware path planning strategy for uavs in urban environments[J]. Journal of Intelligent & Robotic systems, 2019, 95 (2): 629-643.
|
| [33] |
BAHAR MRB, GHIASI A R, BAHAR H B. Grid roadmap based ANN corridor search for collision free, path planning[J]. Scientia Iranica, 2012, 19 (6): 1850-1855. doi: 10.1016/j.scient.2012.02.028
|
| [34] |
LI Junjun, XU Bowei, YANG Yongsheng, et al. Quantum ant colony optimization algorithm for AGVs path planning based on Bloch coordinates of pheromones[J]. Natural Computing, 2020, 19 (4): 673-682. doi: 10.1007/s11047-018-9711-0
|
| [35] |
ZHAO Dongming, YU Huimin, FANG Xiang, et al. A path planning method based on multi objective cauchy mutation cat swarm optimization algorithm for navigation system of intelligent patrol car[J]. IEEE Access, 2020 (8) : 151788-151803.
|
| [36] |
JIANG Kun, YANG Diange, LIU Chaoran, et al. A flexible multi-layer map model designed for lane-level routeplanning in autonomous vehicles[J]. IEEE Transactions on knowledge and Data Engineering, 2019 (2): 305-318.
|
| [37] |
胡钊政, 孙莹妹, 李祎承. 路面路标高精度地图构建与多尺度车辆定位[J]. 哈尔滨工业大学学报, 2019, 51 (9): 149-156. https://www.cnki.com.cn/Article/CJFDTOTAL-HEBX201909023.htm
HU Zhaozheng, SUN Yingmei, LI Weicheng. High definition map construction from pavement landmarks for multiscale vehicle localization[J]. Journal of Harbin Institute of Technology, 2019, 51 (9): 149-156. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-HEBX201909023.htm
|
| [38] |
陈志军, 许开立. 生产安全事故侵权责任的归责原则研究[J]. 中国安全科学学报, 2016, 26 (9): 13-18. https://www.cnki.com.cn/Article/CJFDTOTAL-ZAQK201609003.htm
CHEN Zhijun, XU Kaili. Study on liability principles for work safety accident tort liability[J]. China Safety Science Journal, 2016, 26 (9): 13-18. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-ZAQK201609003.htm
|
| [39] |
CUER R, PIETRAC L, NIEL E. A formal framework for the safe design of the autonomous driving supervision[J]. Reliability Engineering & System Safety, 2018, (174) : 29-40.
|
| [40] |
牛彬彬. 我国高度自动驾驶汽车侵权责任体系之建构[J]. 西北民族大学学报(哲学社会科学版), 2019 (3): 177-188. doi: 10.3969/j.issn.1001-5140.2019.03.023
NIU Binbin. Construction of highly autonomous vehicles' tort liability system in China[J]. Journal of Northwest Minzu University(Philosophy and Social Sciences), 2019(3): 177-188. (in Chinese) doi: 10.3969/j.issn.1001-5140.2019.03.023
|
| [41] |
张龙. 自动驾驶型道路交通事故责任主体认定研究[J]. 苏州大学学报(哲学社会科学版), 2018, 39 (5): 79-80. https://www.cnki.com.cn/Article/CJFDTOTAL-SZDX201805010.htm
ZHANG Long. Research on the identification of the responsible subject of automatic driving road traffic accidents[J]. Journal of Soochow University(Philosophy & Social Science Edition), 2018, 39 (5): 79-80. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-SZDX201805010.htm
|
Figures(9) / Tables(4)


 DownLoad:
DownLoad: