

网络首发栏目展示本刊经同行评议确定正式录用的文章,这些文章目前处在编校过程,尚未确定卷期及页码,但可以根据DOI进行引用。
显示方式:
当前状态:
, 最新更新时间:
摘要:
为提高智能车节点定位准确率,研究了基于3D点云语义地图表征的智能车定位方法。该方法分为3个部分:基于三维激光点云的语义分割,包括地面分割,交通标志牌分割和杆状语义目标分割;面向智能车的点云语义地图表征,利用分割的语义目标投影,生成带权有向图,语义路,语义编码,再以语义编码和高精度GPS的全局位置组成语义地图表征模型;基于语义表征模型的智能车定位,包括基于GPS匹配的粗定位和基于语义编码渐进匹配的节点定位。实验在3种长度不同、复杂度不同的道路场景下进行,节点定位准确率分别为98.5%,97.6%和97.8%,结果表明所提出的定位方法节点定位准确率高、鲁棒性强且适用于不同的道路场景。
为提高智能车节点定位准确率,研究了基于3D点云语义地图表征的智能车定位方法。该方法分为3个部分:基于三维激光点云的语义分割,包括地面分割,交通标志牌分割和杆状语义目标分割;面向智能车的点云语义地图表征,利用分割的语义目标投影,生成带权有向图,语义路,语义编码,再以语义编码和高精度GPS的全局位置组成语义地图表征模型;基于语义表征模型的智能车定位,包括基于GPS匹配的粗定位和基于语义编码渐进匹配的节点定位。实验在3种长度不同、复杂度不同的道路场景下进行,节点定位准确率分别为98.5%,97.6%和97.8%,结果表明所提出的定位方法节点定位准确率高、鲁棒性强且适用于不同的道路场景。
当前状态:
, 最新更新时间:
摘要:
为准确发现邮轮内部空间乘客之间的伴随关系,在室内环境安装UWB定位设备开展室内人员定位实验。根据UWB定位的位置数据特点,提出结合室内位置语义的Hausdorff-DBSCAN算法以聚类邮轮乘员轨迹,并利用LSTM神经网络对疑似伴随关系对象进行相似度变化趋势的预测。传统的Hausdorff算法在计算轨迹相似度时未考虑轨迹时序一致的问题,引入位置语义序列能够较好地解决这一问题。改进后的Hausdorff-DBSCAN算法的输入为乘员轨迹数据集,根据轨迹整体相似度阈值选定聚类半径,输出具有伴随关系的乘员轨迹聚类结果; LSTM神经网络以定长时间窗口的点邻近度序列为输入,预测后一时刻点邻近度值,结合轨迹相似度阈值和预测结果分析乘员伴随关系的时序变化。利用Anylogic建模单层邮轮室内环境进行乘员仿真得到的轨迹数据验证算法的有效性。改进的Hausdorff-DBSCAN算法的准确率为0.920,召回率为0.950,F1值为0.934,准确率高出对比算法至少5.7%,召回率高出对比算法至少8.0%,F1值高出对比算法至少6.7%。同时LSTM在预测邮轮乘员之间相似度变化时,收敛后的误差值能保持在3%~4%左右,预测结果具有较高的准确性。
为准确发现邮轮内部空间乘客之间的伴随关系,在室内环境安装UWB定位设备开展室内人员定位实验。根据UWB定位的位置数据特点,提出结合室内位置语义的Hausdorff-DBSCAN算法以聚类邮轮乘员轨迹,并利用LSTM神经网络对疑似伴随关系对象进行相似度变化趋势的预测。传统的Hausdorff算法在计算轨迹相似度时未考虑轨迹时序一致的问题,引入位置语义序列能够较好地解决这一问题。改进后的Hausdorff-DBSCAN算法的输入为乘员轨迹数据集,根据轨迹整体相似度阈值选定聚类半径,输出具有伴随关系的乘员轨迹聚类结果; LSTM神经网络以定长时间窗口的点邻近度序列为输入,预测后一时刻点邻近度值,结合轨迹相似度阈值和预测结果分析乘员伴随关系的时序变化。利用Anylogic建模单层邮轮室内环境进行乘员仿真得到的轨迹数据验证算法的有效性。改进的Hausdorff-DBSCAN算法的准确率为0.920,召回率为0.950,F1值为0.934,准确率高出对比算法至少5.7%,召回率高出对比算法至少8.0%,F1值高出对比算法至少6.7%。同时LSTM在预测邮轮乘员之间相似度变化时,收敛后的误差值能保持在3%~4%左右,预测结果具有较高的准确性。
当前状态:
, 最新更新时间:
摘要:
针对采用多状态约束卡尔曼滤波(MSCKF)的视觉惯性里程计定位精度易受特征点匹配异常值影响问题,提出了一种基于描述符辅助光流跟踪匹配的数据关联方法。该方法采用金字塔LK光流对序列图像中特征点进行跟踪匹配,计算每一对匹配点的rBRIEF描述符,根据Hamming距离对描述符的相似度进行判断消除异常匹配点。在实验中从特征点匹配主观效果以及定位精度两个方面评估本文方法的有效性。结果表明:所提出方法能够有效滤除动态场景下图像特征匹配的异常值,使用该方法处理后的图像进行MSCKF运动解算,位置结果漂移率小于0.38%,相较于未剔除异常匹配值的MSCKF算法结果,改善了54.7%,单帧图像处理时间约为39 ms。
针对采用多状态约束卡尔曼滤波(MSCKF)的视觉惯性里程计定位精度易受特征点匹配异常值影响问题,提出了一种基于描述符辅助光流跟踪匹配的数据关联方法。该方法采用金字塔LK光流对序列图像中特征点进行跟踪匹配,计算每一对匹配点的rBRIEF描述符,根据Hamming距离对描述符的相似度进行判断消除异常匹配点。在实验中从特征点匹配主观效果以及定位精度两个方面评估本文方法的有效性。结果表明:所提出方法能够有效滤除动态场景下图像特征匹配的异常值,使用该方法处理后的图像进行MSCKF运动解算,位置结果漂移率小于0.38%,相较于未剔除异常匹配值的MSCKF算法结果,改善了54.7%,单帧图像处理时间约为39 ms。
当前状态:
, 最新更新时间:
摘要:
为解决室内交通场景中智能汽车和移动机器人进行定位计算的问题,利用室内场景中已存在的各类标志,引入BEBLID(Boosted Efficient Binary Local Image Descriptor)算法,提出1种视觉定位方法。对BEBLID算法进行改进,赋予其对图像整体进行特征表征的能力。将定位过程分解为离线阶段和在线阶段,离线阶段构建场景标志地图,在线阶段将当前图像所提取的全局和局部BEBLID特征与场景标志地图的对应特征进行匹配,引入KNN方法确定最近节点和最近图像,并利用场景特征地图中存储的标志坐标信息,进行度量计算,获取当前位置信息。在教学楼、办公楼和室内停车场场景进行实验,实验中对场景标志的正确识别率达到90%,平均定位误差小于1 m,与传统方法相比,同一样本下识别精度相对提升约10%,实验验证了算法的有效性。
为解决室内交通场景中智能汽车和移动机器人进行定位计算的问题,利用室内场景中已存在的各类标志,引入BEBLID(Boosted Efficient Binary Local Image Descriptor)算法,提出1种视觉定位方法。对BEBLID算法进行改进,赋予其对图像整体进行特征表征的能力。将定位过程分解为离线阶段和在线阶段,离线阶段构建场景标志地图,在线阶段将当前图像所提取的全局和局部BEBLID特征与场景标志地图的对应特征进行匹配,引入KNN方法确定最近节点和最近图像,并利用场景特征地图中存储的标志坐标信息,进行度量计算,获取当前位置信息。在教学楼、办公楼和室内停车场场景进行实验,实验中对场景标志的正确识别率达到90%,平均定位误差小于1 m,与传统方法相比,同一样本下识别精度相对提升约10%,实验验证了算法的有效性。
当前状态:
, 最新更新时间:
摘要:
为实现智能网联环境下低成本、高精度的车辆定位,研究了基于自适应遗传Rao-Blackwellized粒子滤波的协同地图匹配算法。利用联网车辆的定位信息和道路约束条件消除公共偏差,提高车辆定位精度。将自适应遗传算法引入到粒子滤波的重采样过程中,增加粒子的多样性,解决传统粒子滤波算法中容易出现的“粒子退化”和“粒子耗尽”问题。通过仿真实验与传统粒子滤波及卡尔曼平滑粒子滤波下的定位结果进行了对比,同时分析了不同联网车辆数目对定位精度的影响。通过实际测试验证了算法在实际应用中的定位效果。实测结果表明:以典型十字路口为例,在联网车辆数目为4的情况下,协同地图匹配算法的定位误差范围为1.67 m,分别为原始GNSS定位以及单车地图匹配定位结果的41.03%和56.80%。同时,该算法的统计定位精度(CEP)达到1.06 m,比GNSS原始定位精度提高了2.52 m,具有较好的定位效果。
为实现智能网联环境下低成本、高精度的车辆定位,研究了基于自适应遗传Rao-Blackwellized粒子滤波的协同地图匹配算法。利用联网车辆的定位信息和道路约束条件消除公共偏差,提高车辆定位精度。将自适应遗传算法引入到粒子滤波的重采样过程中,增加粒子的多样性,解决传统粒子滤波算法中容易出现的“粒子退化”和“粒子耗尽”问题。通过仿真实验与传统粒子滤波及卡尔曼平滑粒子滤波下的定位结果进行了对比,同时分析了不同联网车辆数目对定位精度的影响。通过实际测试验证了算法在实际应用中的定位效果。实测结果表明:以典型十字路口为例,在联网车辆数目为4的情况下,协同地图匹配算法的定位误差范围为1.67 m,分别为原始GNSS定位以及单车地图匹配定位结果的41.03%和56.80%。同时,该算法的统计定位精度(CEP)达到1.06 m,比GNSS原始定位精度提高了2.52 m,具有较好的定位效果。
2025, 43(1): 1-14.
doi: 10.3963/j.jssn.1674-4861.2025.01.001
摘要:
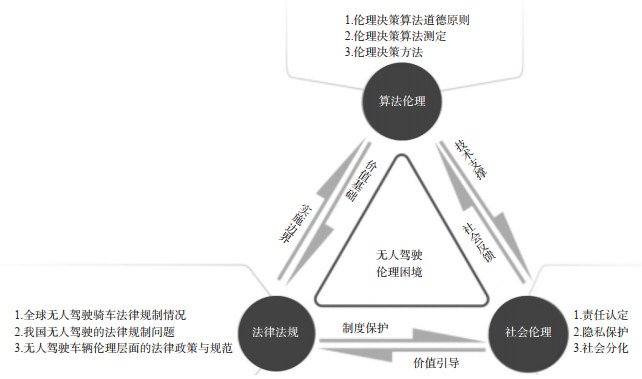
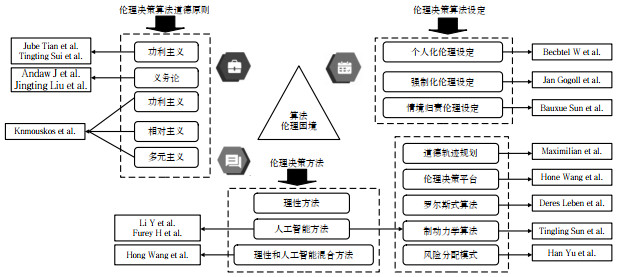
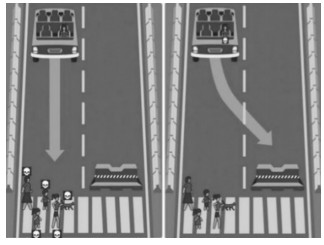
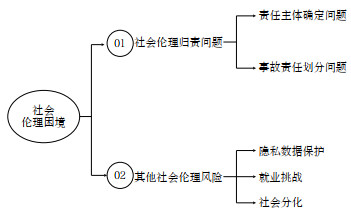
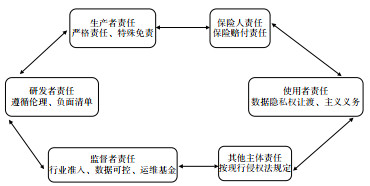
随着自动驾驶技术的不断发展,其在提升交通效率与安全性方面展现出巨大潜力,但所引发的伦理问题也日益凸显,逐渐成为制约其广泛应用的重要因素。为此,本文从伦理理论与制度建设的视角出发,系统探讨无人驾驶汽车发展过程中面临的核心伦理困境。重点梳理了算法伦理、社会伦理和法律规制3个方面的问题,包括基于功利主义与义务论的道德决策、事故归责机制及全球与国内法律应对等关键议题。在算法伦理方面,功利主义与义务论的冲突构成道德算法设计的核心难题,“伦理旋钮”等新兴模型为算法伦理提供了初步探索方向。在责任归属方面,需从传统以人为核心的归责模式转向涵盖研发、生产、使用等环节的链条式责任划分机制。在法律规制方面,当前法律体系面临适用性不足与制度空白等问题,亟需构建与技术发展相匹配的法律框架。未来研究可进一步深化跨学科协同,从伦理建模、责任界定到制度设计等方面提出更具可操作性的解决方案,以为不同等级自动驾驶汽车的安全、可持续落地提供坚实的伦理支撑。
随着自动驾驶技术的不断发展,其在提升交通效率与安全性方面展现出巨大潜力,但所引发的伦理问题也日益凸显,逐渐成为制约其广泛应用的重要因素。为此,本文从伦理理论与制度建设的视角出发,系统探讨无人驾驶汽车发展过程中面临的核心伦理困境。重点梳理了算法伦理、社会伦理和法律规制3个方面的问题,包括基于功利主义与义务论的道德决策、事故归责机制及全球与国内法律应对等关键议题。在算法伦理方面,功利主义与义务论的冲突构成道德算法设计的核心难题,“伦理旋钮”等新兴模型为算法伦理提供了初步探索方向。在责任归属方面,需从传统以人为核心的归责模式转向涵盖研发、生产、使用等环节的链条式责任划分机制。在法律规制方面,当前法律体系面临适用性不足与制度空白等问题,亟需构建与技术发展相匹配的法律框架。未来研究可进一步深化跨学科协同,从伦理建模、责任界定到制度设计等方面提出更具可操作性的解决方案,以为不同等级自动驾驶汽车的安全、可持续落地提供坚实的伦理支撑。

2025, 43(1): 15-30.
doi: 10.3963/j.jssn.1674-4861.2025.01.002
摘要:
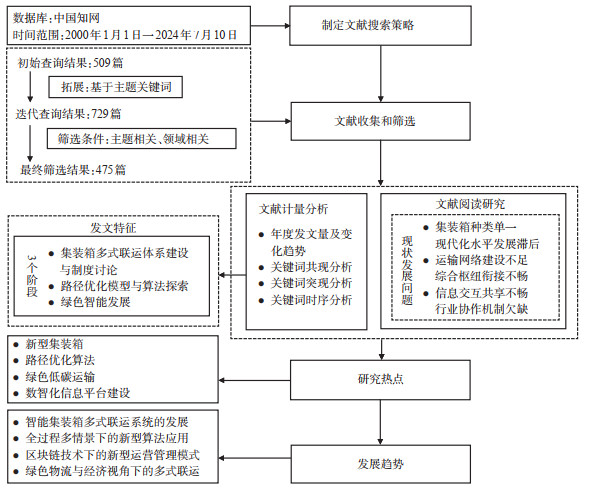
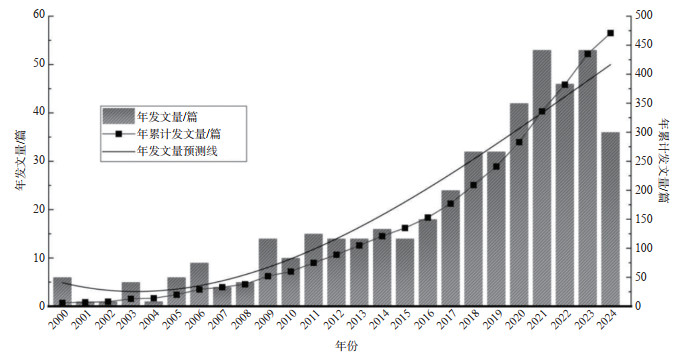
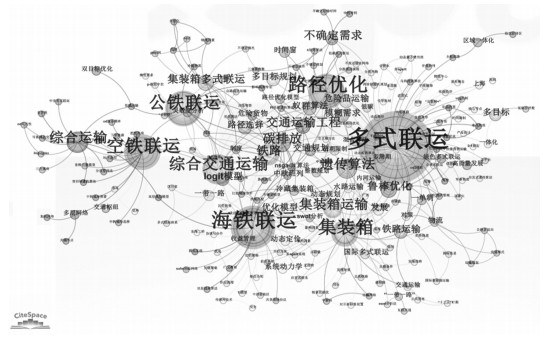
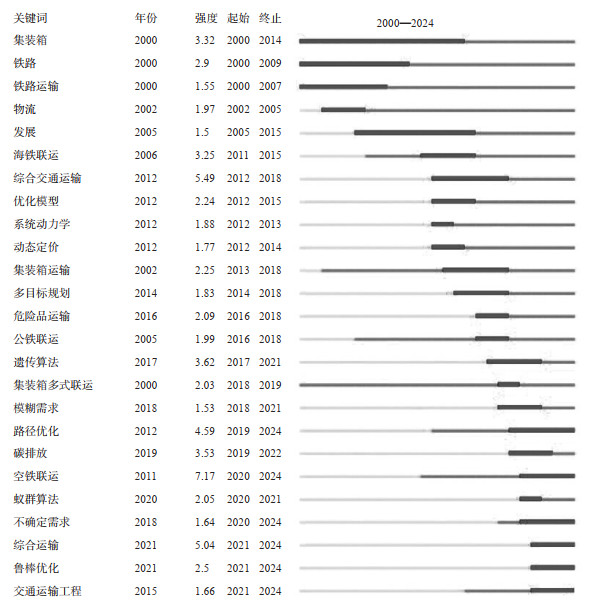
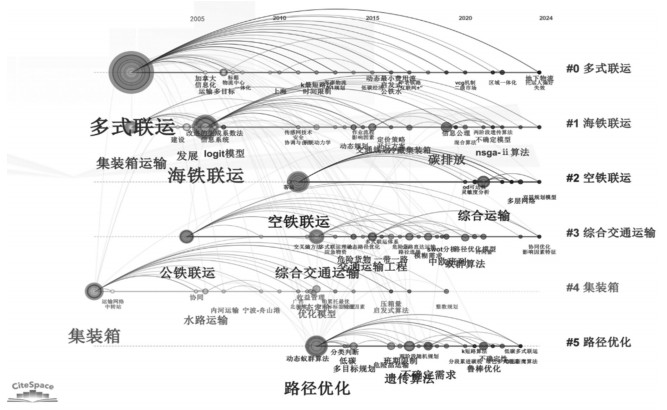
随着全球化贸易的蓬勃发展,集装箱多式联运逐渐成为国际货物运输的主流模式。多样化市场需求的迅猛增长和新兴技术的进步与创新,为中国集装箱多式联运领域提供了广阔的发展空间。为系统总结中国集装箱多式联运领域的研究,检索中国知网(China National Knowledge Infrastructure,CNKI)核心数据库2000年1月1日—2024年7月10日共475篇中英文献,借助CiteSpace软件进行可视化分析,并结合文献阅读研究,总结得到集装箱多式联运领域的发文特征、研究现状、研究热点和研究趋势。研究结果表明:中国集装箱多式联运领域近年来突出的研究热点集中在新型集装箱、路径优化算法、绿色低碳运输和数智化信息平台建设等方面。目前集装箱多式联运领域研究存在的主要问题有:自动化设备与信息平台尚未实现全链条覆盖,全流程智能化进程缓慢;路径优化算法的实证研究不足,应对复杂场景能力受限;绿色能源应用与碳税制度构建尚不完善,综合性政策研究不足;信息平台建设面临数据互通壁垒与信息共享安全风险,协同效率提升有限。未来发展方向呈现多维度技术融合和系统性创新特征,主要集中在多式联运智能系统的动态响应与自主决策、全过程多情景下新型算法的开发与迁移、基于区块链技术的智能合约与自动结算、绿色岸电技术与新能源动力系统的耦合应用等方向。
随着全球化贸易的蓬勃发展,集装箱多式联运逐渐成为国际货物运输的主流模式。多样化市场需求的迅猛增长和新兴技术的进步与创新,为中国集装箱多式联运领域提供了广阔的发展空间。为系统总结中国集装箱多式联运领域的研究,检索中国知网(China National Knowledge Infrastructure,CNKI)核心数据库2000年1月1日—2024年7月10日共475篇中英文献,借助CiteSpace软件进行可视化分析,并结合文献阅读研究,总结得到集装箱多式联运领域的发文特征、研究现状、研究热点和研究趋势。研究结果表明:中国集装箱多式联运领域近年来突出的研究热点集中在新型集装箱、路径优化算法、绿色低碳运输和数智化信息平台建设等方面。目前集装箱多式联运领域研究存在的主要问题有:自动化设备与信息平台尚未实现全链条覆盖,全流程智能化进程缓慢;路径优化算法的实证研究不足,应对复杂场景能力受限;绿色能源应用与碳税制度构建尚不完善,综合性政策研究不足;信息平台建设面临数据互通壁垒与信息共享安全风险,协同效率提升有限。未来发展方向呈现多维度技术融合和系统性创新特征,主要集中在多式联运智能系统的动态响应与自主决策、全过程多情景下新型算法的开发与迁移、基于区块链技术的智能合约与自动结算、绿色岸电技术与新能源动力系统的耦合应用等方向。
2025, 43(1): 31-41.
doi: 10.3963/j.jssn.1674-4861.2025.01.003
摘要:
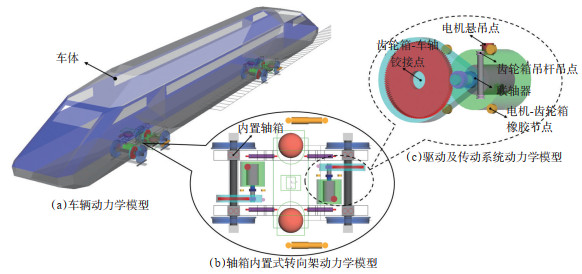
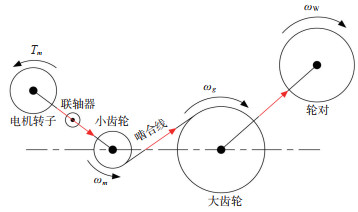
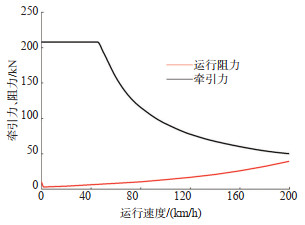
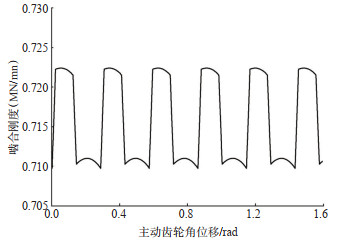
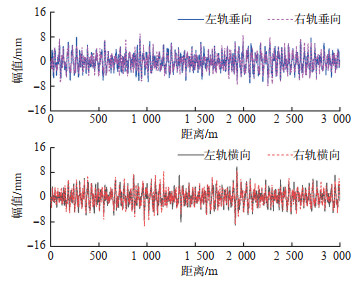
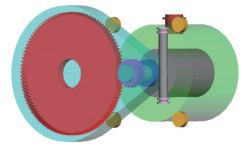
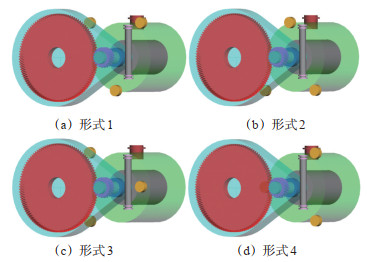
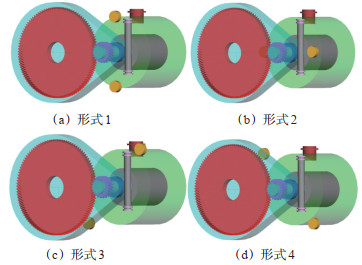
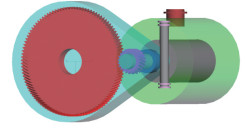
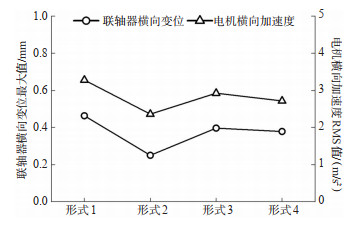
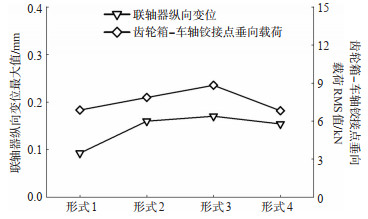
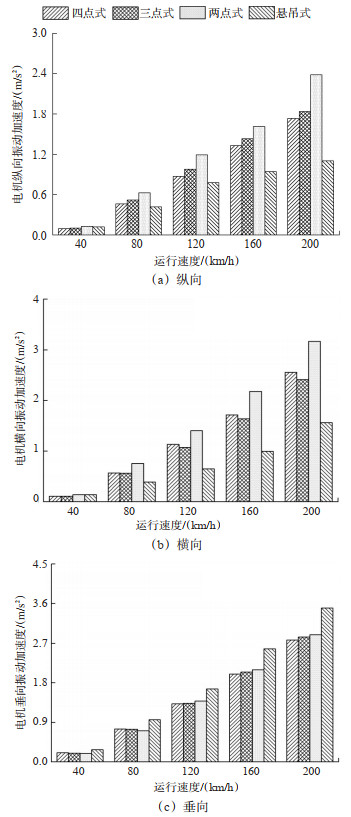
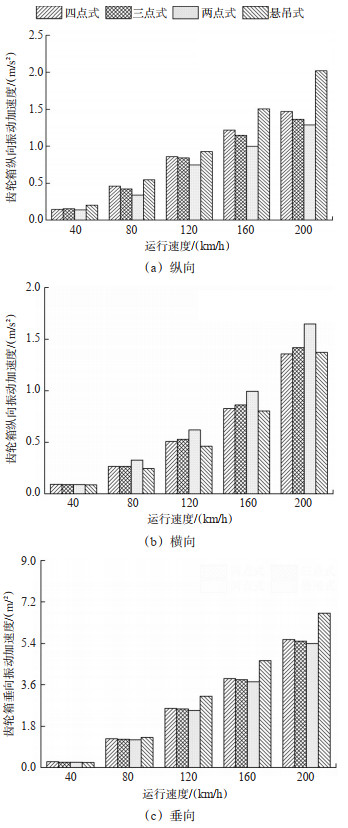
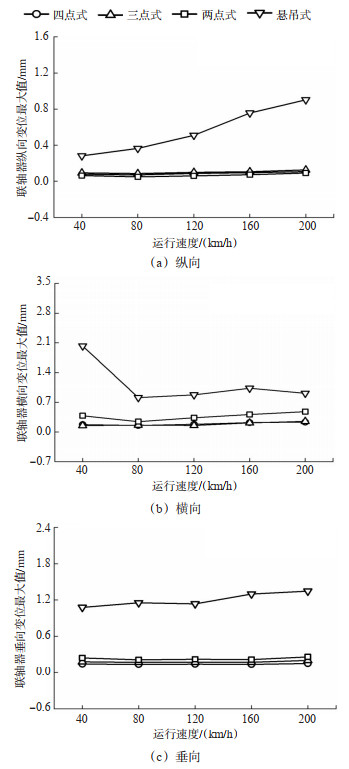
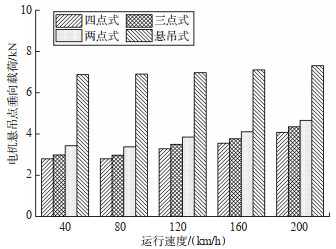
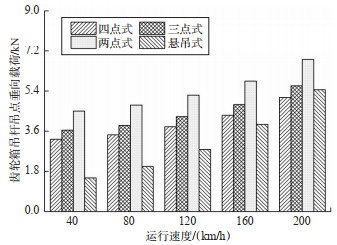
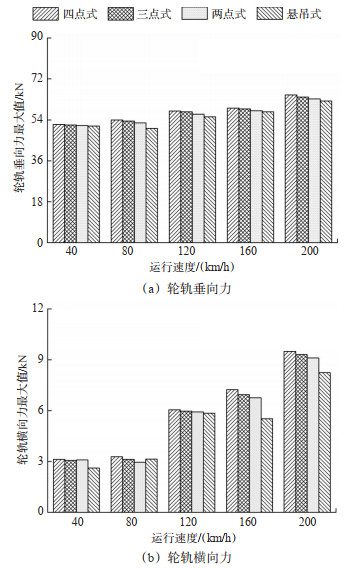
为了优化轴箱内置式转向架驱动系统的悬挂结构,提高轨道交通车辆的服役安全性和可靠性,基于齿轮动力学、车辆系统动力学等理论,利用多体动力学软件SIMPACK建立了考虑驱动及传动系统的轴箱内置式车辆动力学模型。在现采用的轴箱内置式转向架驱动系统悬挂形式的基础上,研究了3种不同的悬挂结构,分析了不同驱动系统悬挂结构下,牵引电机质量在一系簧下及一系簧上的分配比例;考虑齿轮啮合及轨道随机不平顺等内、外部激励,结合驱动系统不同悬挂结构形式,研究了不同车辆运行速度下牵引电机等关键部件的振动响应、联轴器变位、驱动系统悬挂点动态载荷等动力学特性,揭示了不同驱动系统悬挂结构对轴箱内置式转向架动态性能的影响规律。研究结果表明:齿轮箱与电机之间用橡胶节点连接可以限制二者的相对位移,对联轴器起到良好的保护作用,但由于增加振动从轮轨界面向驱动系统及构架传递的路径,牵引电机及构架等关键部件振动水平显著升高;减少齿轮箱与电机之间橡胶节点的数量,可以减小驱动系统分配到一系簧下的质量以及齿轮箱与车轴铰接处的垂向载荷,但会增大电机悬吊点和齿轮箱吊杆吊点承受的垂向载荷。本文的研究结果可为轴箱内置式动力转向架驱动系统悬挂结构的设计提供参考。
为了优化轴箱内置式转向架驱动系统的悬挂结构,提高轨道交通车辆的服役安全性和可靠性,基于齿轮动力学、车辆系统动力学等理论,利用多体动力学软件SIMPACK建立了考虑驱动及传动系统的轴箱内置式车辆动力学模型。在现采用的轴箱内置式转向架驱动系统悬挂形式的基础上,研究了3种不同的悬挂结构,分析了不同驱动系统悬挂结构下,牵引电机质量在一系簧下及一系簧上的分配比例;考虑齿轮啮合及轨道随机不平顺等内、外部激励,结合驱动系统不同悬挂结构形式,研究了不同车辆运行速度下牵引电机等关键部件的振动响应、联轴器变位、驱动系统悬挂点动态载荷等动力学特性,揭示了不同驱动系统悬挂结构对轴箱内置式转向架动态性能的影响规律。研究结果表明:齿轮箱与电机之间用橡胶节点连接可以限制二者的相对位移,对联轴器起到良好的保护作用,但由于增加振动从轮轨界面向驱动系统及构架传递的路径,牵引电机及构架等关键部件振动水平显著升高;减少齿轮箱与电机之间橡胶节点的数量,可以减小驱动系统分配到一系簧下的质量以及齿轮箱与车轴铰接处的垂向载荷,但会增大电机悬吊点和齿轮箱吊杆吊点承受的垂向载荷。本文的研究结果可为轴箱内置式动力转向架驱动系统悬挂结构的设计提供参考。


2025, 43(1): 42-51.
doi: 10.3963/j.jssn.1674-4861.2025.01.004
摘要:
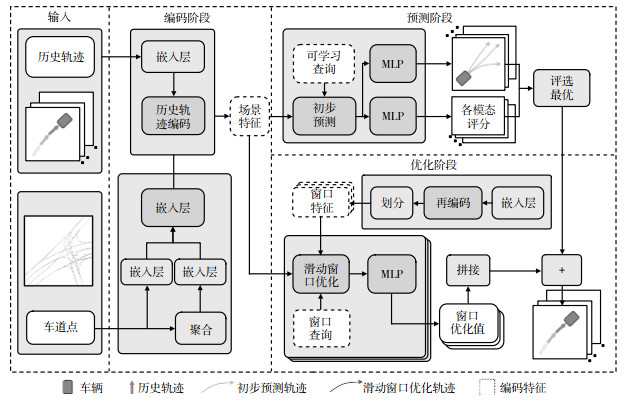
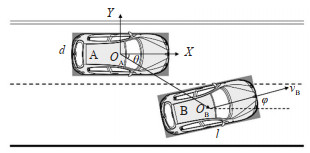
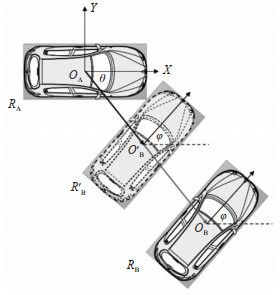
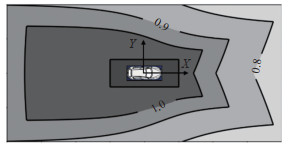
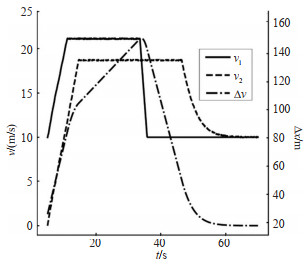
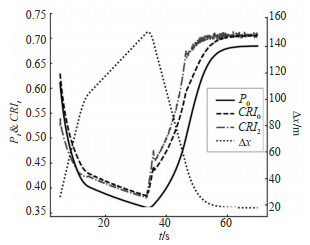
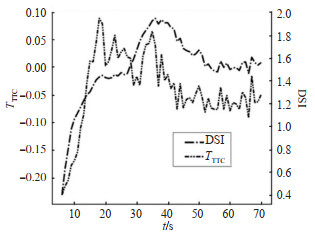
针对智能驾驶系统在驾驶风险预警中存在的动态交互特征捕捉不足、多模态轨迹预测精度有限以及碰撞风险量化物理指标过度单一等问题,研究了基于多模态轨迹预测与概率量化耦合的预见性碰撞风险评估模型。在轨迹预测部分,研究了分层图注意力网络,通过图注意力机制融合高精地图、车道线以及车辆历史轨迹特征,能够有效捕捉车辆行驶环境中的动态变化;针对传统模型中先预测再细化的两阶段解码结构,引入滑动窗口优化解码器,能够准确预测临近车辆的未来轨迹。在碰撞风险评估部分,研究了1种基于概率量化的碰撞风险评估方法,通过结合预测的未来轨迹与碰撞风险,估算自车与周边车辆发生碰撞的概率,实现对车辆危险行为的提前预警。实验结果表明:在Argoverse数据集上最小终点位移误差、最小平均位移误差和漏检率分别为0.785、1.157和0.126,与HiVT与LaneGCN相比,在终点预测方面误差分别减少了1%和15.1%。在城市交通能力仿真软件(simulation of urban mobility,SUMO)上验证预测风险与实际风险的偏差约为5%,从数据波动性上看,危险程度波动幅度为0.3,与碰撞时间(time to collision,TTC)方法和动态安全指数(dynamic safety index,DSI)方法相比,波动幅度分别减少33.3%和18.75%,在持续驾驶场景中展现出更优秀的风险评估水准;证明了基于障碍车辆轨迹预测的驾驶碰撞风险模型在预测未来潜在驾驶风险的准确性。
针对智能驾驶系统在驾驶风险预警中存在的动态交互特征捕捉不足、多模态轨迹预测精度有限以及碰撞风险量化物理指标过度单一等问题,研究了基于多模态轨迹预测与概率量化耦合的预见性碰撞风险评估模型。在轨迹预测部分,研究了分层图注意力网络,通过图注意力机制融合高精地图、车道线以及车辆历史轨迹特征,能够有效捕捉车辆行驶环境中的动态变化;针对传统模型中先预测再细化的两阶段解码结构,引入滑动窗口优化解码器,能够准确预测临近车辆的未来轨迹。在碰撞风险评估部分,研究了1种基于概率量化的碰撞风险评估方法,通过结合预测的未来轨迹与碰撞风险,估算自车与周边车辆发生碰撞的概率,实现对车辆危险行为的提前预警。实验结果表明:在Argoverse数据集上最小终点位移误差、最小平均位移误差和漏检率分别为0.785、1.157和0.126,与HiVT与LaneGCN相比,在终点预测方面误差分别减少了1%和15.1%。在城市交通能力仿真软件(simulation of urban mobility,SUMO)上验证预测风险与实际风险的偏差约为5%,从数据波动性上看,危险程度波动幅度为0.3,与碰撞时间(time to collision,TTC)方法和动态安全指数(dynamic safety index,DSI)方法相比,波动幅度分别减少33.3%和18.75%,在持续驾驶场景中展现出更优秀的风险评估水准;证明了基于障碍车辆轨迹预测的驾驶碰撞风险模型在预测未来潜在驾驶风险的准确性。




2025, 43(1): 52-60.
doi: 10.3963/j.jssn.1674-4861.2025.01.005
摘要:
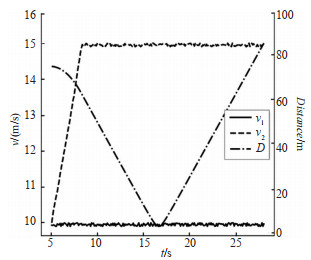
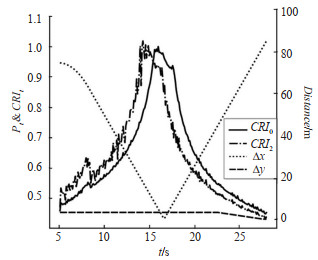
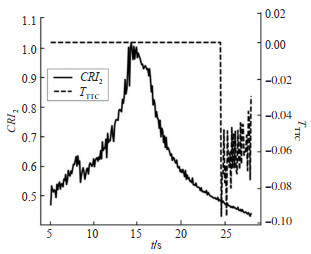
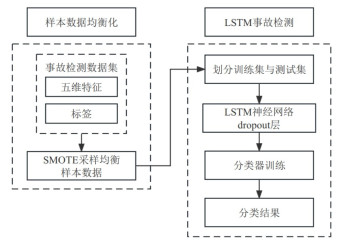
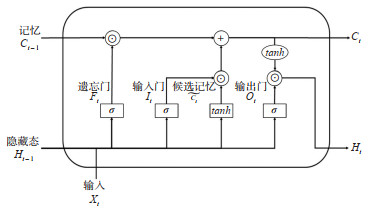
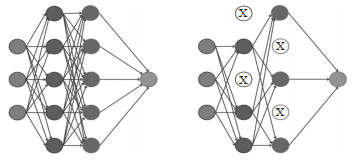
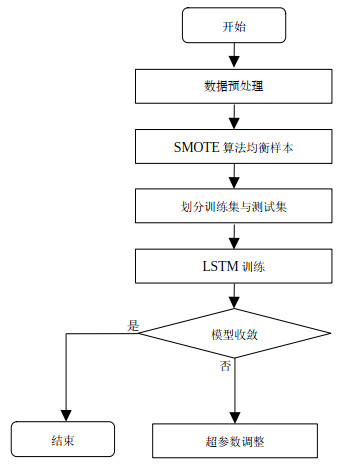
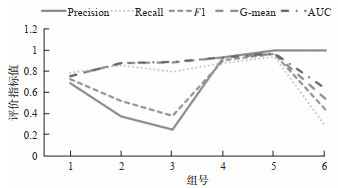
在车辆事故检测中,由于事故车辆相比于正常车辆数量较少,将导致数据不平衡,从而使得事故车辆无法被正确识别,容易将其误判为正常车辆。因此,研究了1种基于SMOTE-LSTM的车辆事故检测算法。针对事故数据与正常数据不平衡问题,采用合成少数类过采样技术(synthetic minority over-sampling technique,SMOTE),在事故类样本点之间随机插入样本、增加其数量,实现事故与正常2类样本的数据平衡。同时,在对事故数据进行过采样时,通过对比不同邻居数下的检测精度,选择了最优的邻居数,以提高事故类样本识别率并避免过多噪声干扰。在此基础上采用长短期记忆网络(long short term memory,LSTM)精准捕获车辆发生事故时的数据时序特征,并通过引入Dropout层有效降低过拟合,提升了模型的泛化能力,准确实现车辆事故检测。此外,为了减少事故车辆被误检为正常车辆的情况,在模型损失函数中引入了类别权重,通过调整权重使模型更关注对事故类样本的检测。最后,在采集的车辆行驶状态时序数据集上进行6组对比实验。其中,前3组实验未采用基于SMOTE-LSTM的算法,在增加正常样本的基础上进行类别平衡、轻微和中等类别不平衡的车辆事故检测。后3组实验采用了基于SMOTE-LSTM的算法,涉及轻微、中等和极度类别不平衡情况。实验结果表明:当使用本文方法进行车辆事故检测时,Precision、Recall、F1值、G-mean,以及AUC值均取得了显著的提升,其中在轻微类别不平衡情况下,这5个评价指标值分别提高了56.2%、2.5%、38.7%、5.8%和5.4%。在中等类别不平衡情况下,分别提高了75%、14.1%、59%、8.2%和7.8%。结果表明,本文所提算法在处理车辆事故检测中的类别不平衡问题时,能够显著提高各项评价指标,尤其在轻微和中等类别不平衡的情况下,算法有效提升了对少数类的识别能力,展现了较强的鲁棒性和更好的分类性能。
在车辆事故检测中,由于事故车辆相比于正常车辆数量较少,将导致数据不平衡,从而使得事故车辆无法被正确识别,容易将其误判为正常车辆。因此,研究了1种基于SMOTE-LSTM的车辆事故检测算法。针对事故数据与正常数据不平衡问题,采用合成少数类过采样技术(synthetic minority over-sampling technique,SMOTE),在事故类样本点之间随机插入样本、增加其数量,实现事故与正常2类样本的数据平衡。同时,在对事故数据进行过采样时,通过对比不同邻居数下的检测精度,选择了最优的邻居数,以提高事故类样本识别率并避免过多噪声干扰。在此基础上采用长短期记忆网络(long short term memory,LSTM)精准捕获车辆发生事故时的数据时序特征,并通过引入Dropout层有效降低过拟合,提升了模型的泛化能力,准确实现车辆事故检测。此外,为了减少事故车辆被误检为正常车辆的情况,在模型损失函数中引入了类别权重,通过调整权重使模型更关注对事故类样本的检测。最后,在采集的车辆行驶状态时序数据集上进行6组对比实验。其中,前3组实验未采用基于SMOTE-LSTM的算法,在增加正常样本的基础上进行类别平衡、轻微和中等类别不平衡的车辆事故检测。后3组实验采用了基于SMOTE-LSTM的算法,涉及轻微、中等和极度类别不平衡情况。实验结果表明:当使用本文方法进行车辆事故检测时,Precision、Recall、F1值、G-mean,以及AUC值均取得了显著的提升,其中在轻微类别不平衡情况下,这5个评价指标值分别提高了56.2%、2.5%、38.7%、5.8%和5.4%。在中等类别不平衡情况下,分别提高了75%、14.1%、59%、8.2%和7.8%。结果表明,本文所提算法在处理车辆事故检测中的类别不平衡问题时,能够显著提高各项评价指标,尤其在轻微和中等类别不平衡的情况下,算法有效提升了对少数类的识别能力,展现了较强的鲁棒性和更好的分类性能。
2025, 43(1): 61-73.
doi: 10.3963/j.jssn.1674-4861.2025.01.006
摘要:
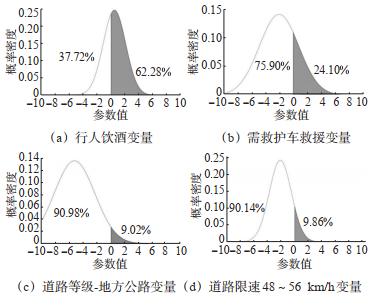
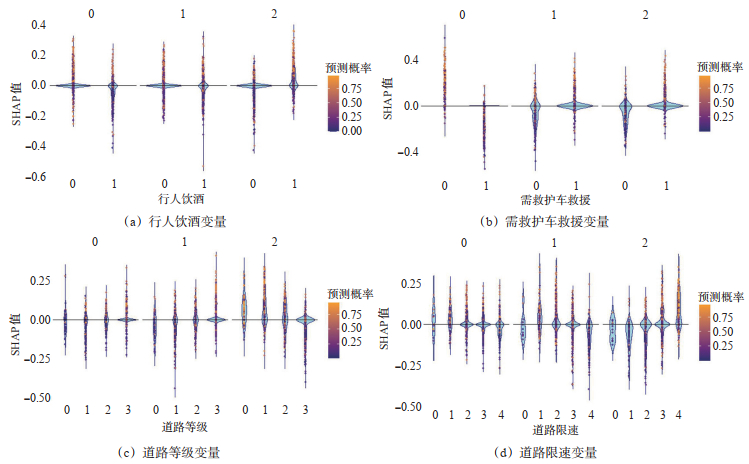
夜间行人-机动车事故因能见度受限等因素导致伤害严重性显著高于白天。为精准识别其影响因素,构建1种混合方法,融合考虑均值和方差异质性的随机参数Logit模型与和基于沙普利可加性特征解释方法(SHapley Additive exPlanation,SHAP)的随机森林(random forest,RF)算法RF-SHAP,以2017—2022年的相关事故数据为研究对象,运用对数似然比检验对事故数据的时间稳定性进行评估,结果表明事故数据存在显著的时间不稳定性。为避免有偏的参数估计,按照2017—2019、2020、2021和2022年分别单独建模并计算显著变量平均边际效应。结果表明:①行人饮酒(2017—2019年)、救护车救援(2020年)、地方公路事故(2021年)及限速48~56 km/h(2022年)在对应年份具有随机效应,其均值或方差受交通控制、道路等级等变量影响;②行人饮酒、行人年龄>45~60岁、驾驶员受伤、车辆类型为皮卡车、货车、道路双向有分隔、不同限速值(32~40 km/h、48~56 km/h、64~72 km/h)、周末和冬季近年来对夜间行人-机动车事故开始呈现显著影响。此外,借助RF-SHAP算法对模型中的随机参数变量进行特征贡献度分析,结果揭示了4个随机参数变量的所有子变量对事故严重程度的异质性影响,并提示在制定交通安全政策时,应重点关注行人饮酒问题,加强对高速与干线公路夜间事故的防控,并合理制定限速值,避免限速过高或过低。
夜间行人-机动车事故因能见度受限等因素导致伤害严重性显著高于白天。为精准识别其影响因素,构建1种混合方法,融合考虑均值和方差异质性的随机参数Logit模型与和基于沙普利可加性特征解释方法(SHapley Additive exPlanation,SHAP)的随机森林(random forest,RF)算法RF-SHAP,以2017—2022年的相关事故数据为研究对象,运用对数似然比检验对事故数据的时间稳定性进行评估,结果表明事故数据存在显著的时间不稳定性。为避免有偏的参数估计,按照2017—2019、2020、2021和2022年分别单独建模并计算显著变量平均边际效应。结果表明:①行人饮酒(2017—2019年)、救护车救援(2020年)、地方公路事故(2021年)及限速48~56 km/h(2022年)在对应年份具有随机效应,其均值或方差受交通控制、道路等级等变量影响;②行人饮酒、行人年龄>45~60岁、驾驶员受伤、车辆类型为皮卡车、货车、道路双向有分隔、不同限速值(32~40 km/h、48~56 km/h、64~72 km/h)、周末和冬季近年来对夜间行人-机动车事故开始呈现显著影响。此外,借助RF-SHAP算法对模型中的随机参数变量进行特征贡献度分析,结果揭示了4个随机参数变量的所有子变量对事故严重程度的异质性影响,并提示在制定交通安全政策时,应重点关注行人饮酒问题,加强对高速与干线公路夜间事故的防控,并合理制定限速值,避免限速过高或过低。
2025, 43(1): 74-84.
doi: 10.3963/j.jssn.1674-4861.2025.01.007
摘要:
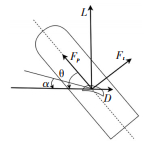
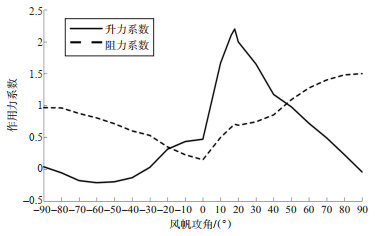
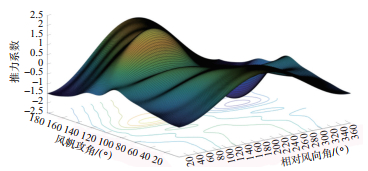
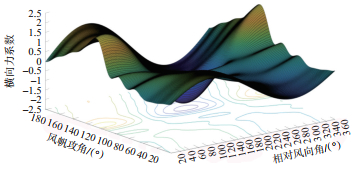
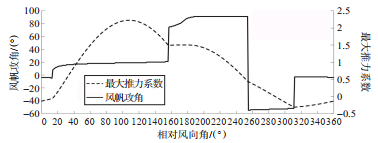
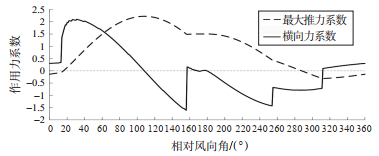
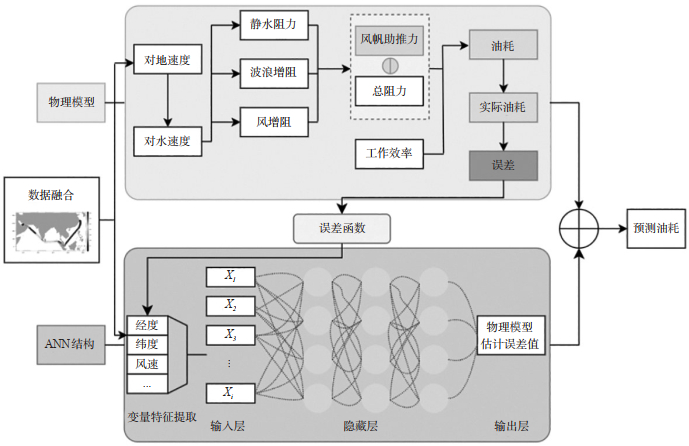
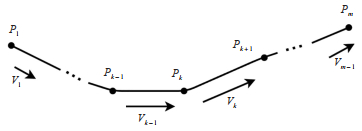
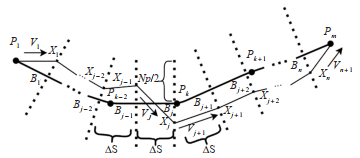
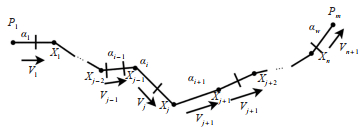
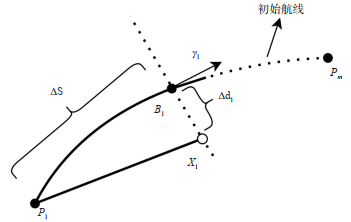
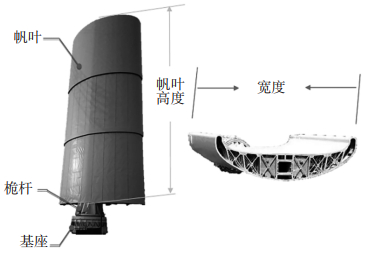
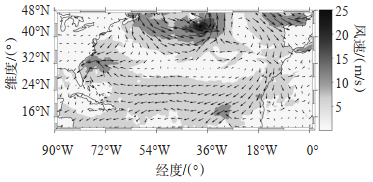
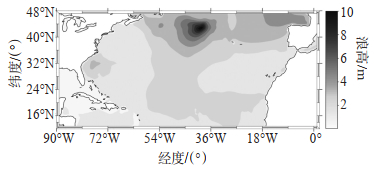
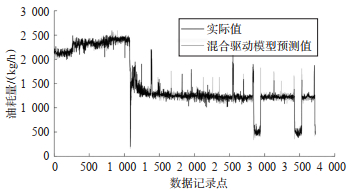
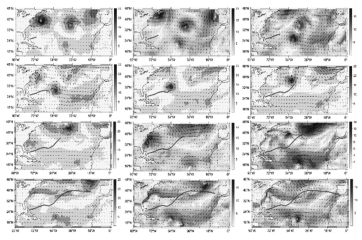
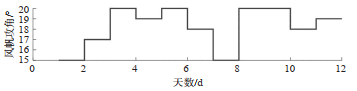
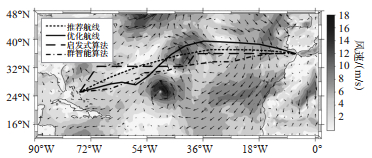
针对风力助航船舶航线优化中存在的风能利用效率量化不足、油耗预测精度受限以及多目标协同优化机制缺失等问题,提出1种融合动态风帆控制与混合驱动预测的多目标航线优化方法。通过建立基于流体力学特性的动态风帆控制策略模型,实现风帆辅助推力的空间矢量解析,该模型突破传统静态攻角设定的局限性,可即时动态调整帆角参数,使风能转化效率处于较高水平。为解决传统物理模型环境适应性差与数据驱动方法物理可解释性弱的双重局限,构建物理约束下的人工神经网络分层融合架构,通过船舶运动学方程构建特征空间基底,采用注意力机制引导的人工神经网络进行残差学习。该方法在保留能耗物理机理的同时,实现数据特征与流体力学方程的双向耦合,经北大西洋航线的验证表明,其油耗预测平均绝对百分比误差(mean absolute percentage error,MAPE)较纯物理模型降低21.9%,较纯数据驱动方法的可解释性也大大提升。在此基础上,建立包含时间成本和燃油消耗的多目标优化模型,设计基于非支配排序遗传算法(non-dominated sorting genetic algorithm,NSGA-Ⅱ)和逼近理想解排序法(technique for order preference by similarity to ideal solution,TOPSIS)的协同优化算法,其非劣解集收敛速度较标准算法得以提升。以“新伊敦”轮为对象的实证研究表明:优化后的航线在北大西洋典型航次中,风帆有效工作效率提升,相较于传统推荐航线,优化航线的单航次航行时间缩短5%左右,油耗成本和固定成本分别降低9.1%和4.95%,总成本降低超过7.2%,有效的提高了风力助航船的经济效益并较少了对环境的污染。
针对风力助航船舶航线优化中存在的风能利用效率量化不足、油耗预测精度受限以及多目标协同优化机制缺失等问题,提出1种融合动态风帆控制与混合驱动预测的多目标航线优化方法。通过建立基于流体力学特性的动态风帆控制策略模型,实现风帆辅助推力的空间矢量解析,该模型突破传统静态攻角设定的局限性,可即时动态调整帆角参数,使风能转化效率处于较高水平。为解决传统物理模型环境适应性差与数据驱动方法物理可解释性弱的双重局限,构建物理约束下的人工神经网络分层融合架构,通过船舶运动学方程构建特征空间基底,采用注意力机制引导的人工神经网络进行残差学习。该方法在保留能耗物理机理的同时,实现数据特征与流体力学方程的双向耦合,经北大西洋航线的验证表明,其油耗预测平均绝对百分比误差(mean absolute percentage error,MAPE)较纯物理模型降低21.9%,较纯数据驱动方法的可解释性也大大提升。在此基础上,建立包含时间成本和燃油消耗的多目标优化模型,设计基于非支配排序遗传算法(non-dominated sorting genetic algorithm,NSGA-Ⅱ)和逼近理想解排序法(technique for order preference by similarity to ideal solution,TOPSIS)的协同优化算法,其非劣解集收敛速度较标准算法得以提升。以“新伊敦”轮为对象的实证研究表明:优化后的航线在北大西洋典型航次中,风帆有效工作效率提升,相较于传统推荐航线,优化航线的单航次航行时间缩短5%左右,油耗成本和固定成本分别降低9.1%和4.95%,总成本降低超过7.2%,有效的提高了风力助航船的经济效益并较少了对环境的污染。



交通信息与安全
Journal of Transport Information and Safety
(1983年创刊 双月刊 )
曾用刊名:《交通与计算机》
主管单位:中华人民共和国教育部
主办单位:武汉理工大学
协办单位:
中国人工智能学会智能交通专业委员会
主 编:钟鸣
副 主 编:马勇 胡钊政 杜志刚
领域主编:陈再刚 杜文博 吕能超
黄亚敏 郑士源
执行主编:徐堃
编辑出版:
《交通信息与安全》编辑部
地 址:
湖北省武汉市武昌区和平大道武汉理工大学余家头校区125信箱
邮 编:430063
电话/传真:027-86580355
E-mail:jtjsj@vip.163.com
官方网站:http://www.jtxa.net/
邮发代号:38-94
国内刊号:CN 42-1781/U
国际刊号:ISSN 1674-4861
期刊收录
- 《中文核心期刊要目总览》入编期刊
- 中国科学引文数据库(CSCD)来源期刊
- 中国科技核心期刊
- RCCSE中国核心学术期刊(A)
- 中国学术期刊综合评价数据库(CAJ-CED)收录
- 中国科技论文与引文数据库(CSTPCD)收录
- 中国核心期刊(遴选)数据库收录
- 中文科技期刊数据库收录
- 中国期刊网(CNKI)收录
- 《中国学术期刊(光盘版)收录》
- 中国终身教育学术研究数据库总库收录
- 日本科学技术振兴机构数据库(JST)收录
- 《世界期刊影响力指数(WJCI)报告》(2020科技版)