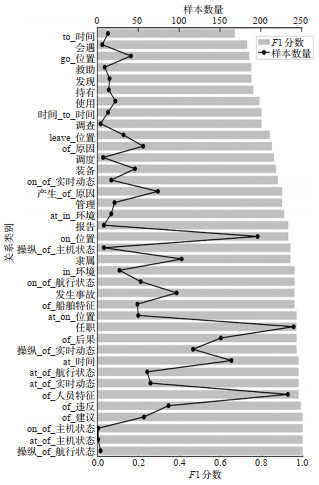
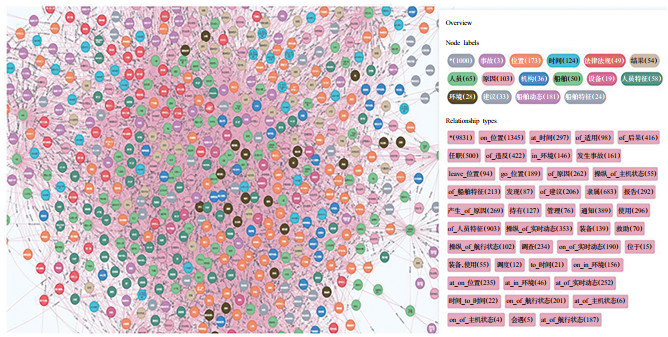
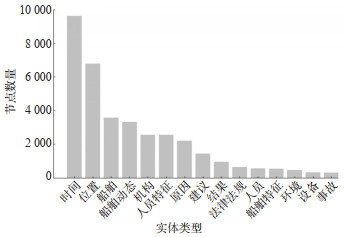
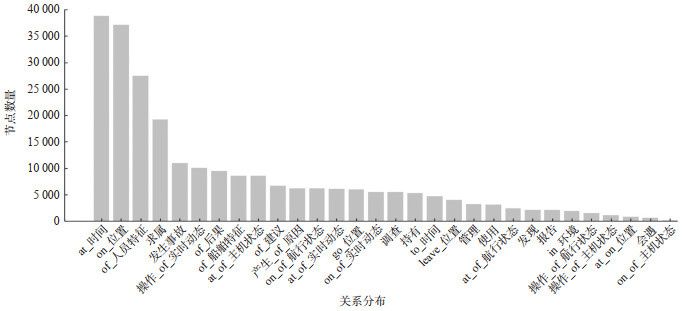
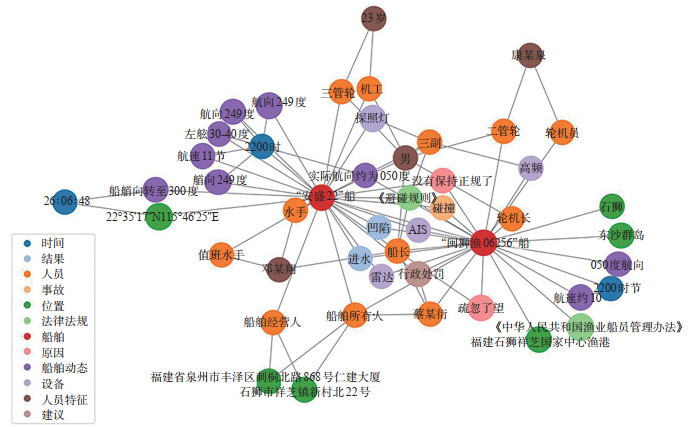
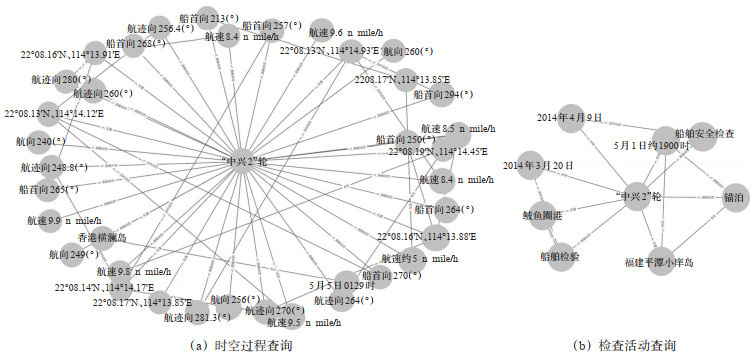
Abstract:
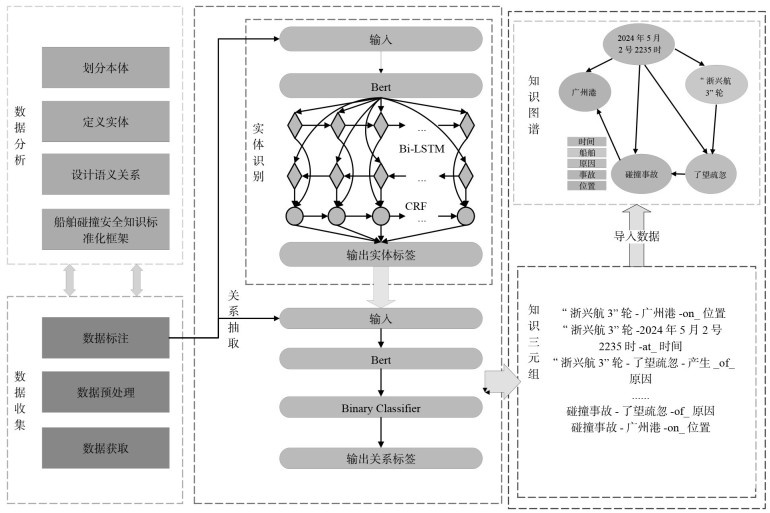
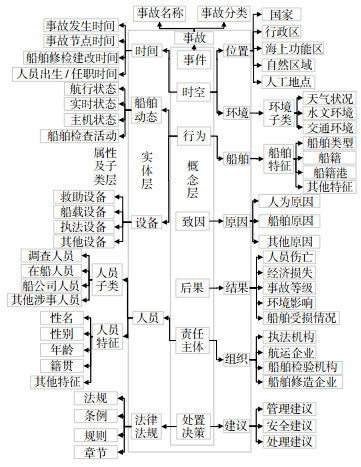
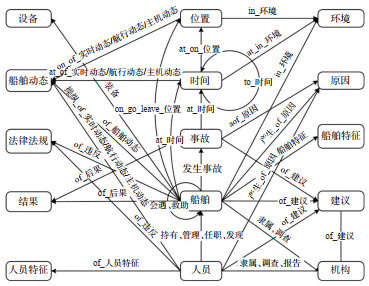
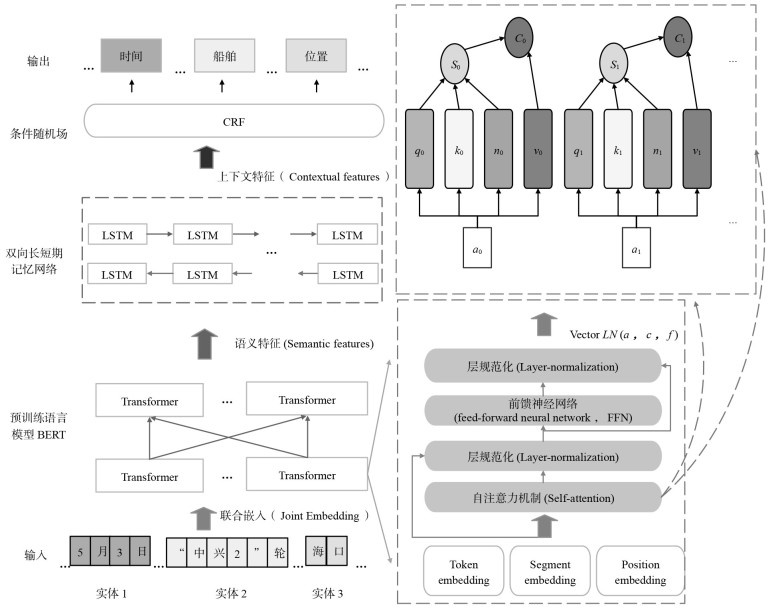
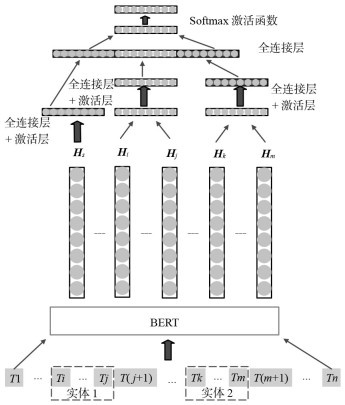
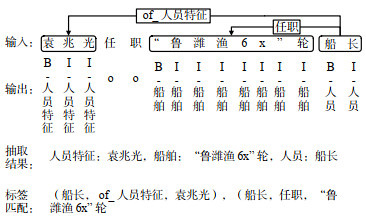
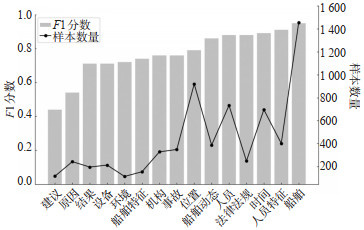
Traditional research on water transportation accidents mainly focuses on exploring the causative factors and corresponding complex relationship with various accidents, which is insufficient in reflecting the evolution of traffic accidents and the complicated interactions between elements including people, vessels, cargo, environment, administration, and information in the maritime system. To fill the gap, this paper proposes a methodology for developing a water transportation knowledge graph based on multi-source heterogeneous information and applies it to the accident prevention and control strategies development. A framework for ship collision knowledge is designed, considering the components of accidents, e.g., event, spatiotemporal ship behavior, maritime accidents causative factors, accidents consequences, corresponding responsibility roles, and disposal decision-making. A knowledge extraction model is employed to extract the maritime safety knowledge, which is based on Chinese Bidirectional Encoder Representations from Transformers Whole Word Masking and is named as Chinese-bert-wwm model. Thirdly, the SCPCKG (ship collision prevention and control knowledge graph) is developed based on the Neo4j database, which contains 35 784 entities from 15 entity types and 325 097 relationships from 39 relationship types. The scale of the SCPCKG is significantly larger than that of existing knowledge graphs in the field of water transportation, and the accuracy of automated knowledge extraction based on the proposed SCPCKG reaches 85%, which is higher than the existing models, such as Hidden Markov Models (HMMs) and Conditional Random Fields (CRFs). Specifically, the F1 -score value for identifying"ship", "person characteristics", "time", "person", and"laws"entities reaches 95%, 91%, 98%, 88%, and 88%, respectively; the F1 -score value of relationship extraction reaches 94%. The results show that the proposed Chinese-bert-wwm model can enhance the generalized capability of the knowledge extraction model by extracting the semantic features of ship collision accidents from the accident reports, and the proposed SCPCKG can be used for the knowledge representation of ship collision accidents and inversion of accidents for maritime administrators, improving the effectiveness of the water transportation management.