Abstract:
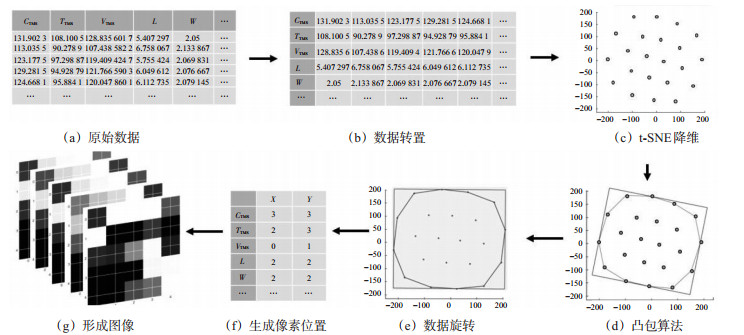
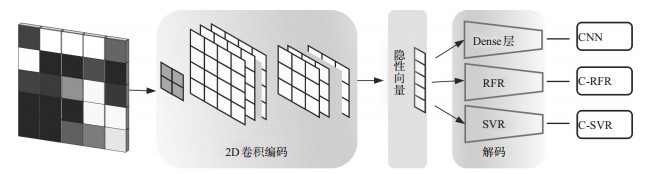
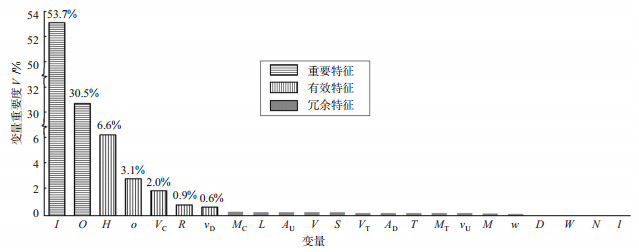
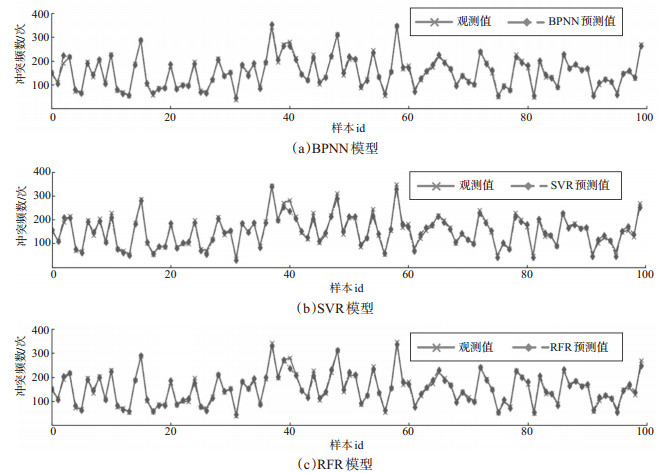
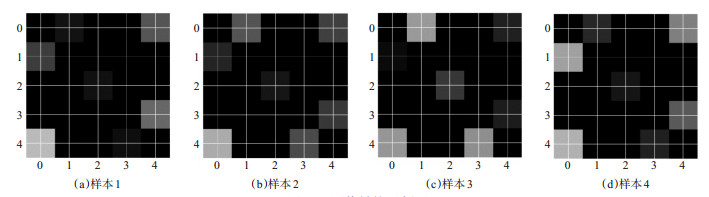
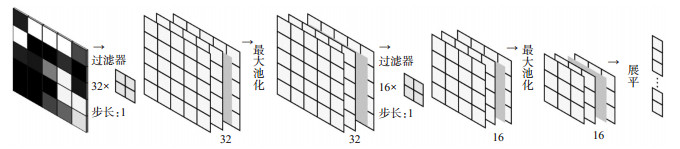
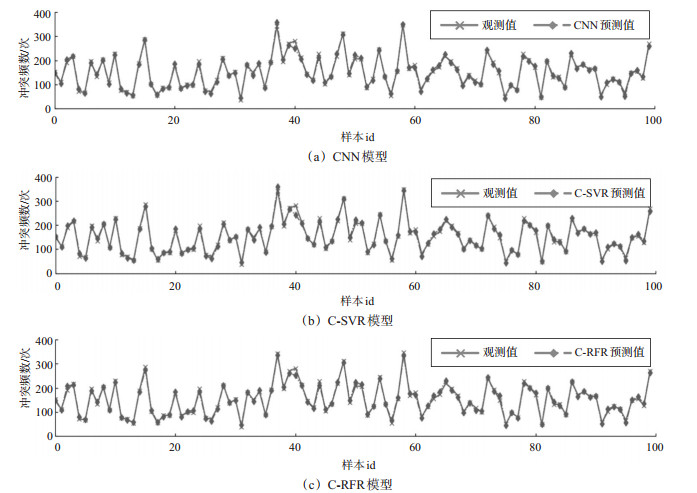
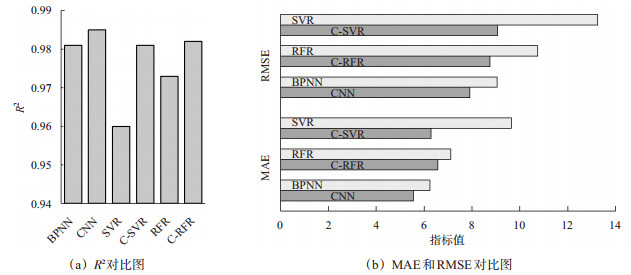
The approach aims to uncover the relationship between dynamic traffic parameters and traffic conflict incidents and it further supports proactive safety control. The highD database is utilized to create sample data in 3-minute intervals, extracting 23 features related to traffic flow and road section characteristics. Based on the post encroachment time(PET)indicator, different thresholds are set to classify the severity of conflicts during car-following and lane-changing scenarios. The random forest regression(RFR)method is used to select the most critical features, while feature matrix to gray image(FM2GI)technology converts the sample data into grayscale images to enable 2D convolution to extract image features. Three encoder-decoder models, convolutional neural networks (CNN), C-RFR, and C-SVR are compared with baseline models (back propagation neural network (BPNN), RFR, and support vector regression(SVR). The results indicated that: based on two key features(the number of vehicles entering and exiting the road section)and five effective features(average headway, time occupancy, average driving speed of passenger cars, lane change rate, and variance of exit speeds), the CNN, C-RFR, and C-SVR models within the encoder-decoder framework outperformed the baseline models. Specifically, root mean squared error(RMSE)reduced by 12. 6%, 31. 6%, and 18. 5%, respectively, enabling real-time prediction of traffic conflicts. Among them, CNN exhibited the lowest prediction error and demonstrated strong robustness in predicting traffic conflicts of varying severities, along with low sensitivity to two key parameters. The CNN, C-RFR, and C-SVR models, utilizing FM2GI technology and 2D convolution encoding, expand the deep learning framework for traffic conflict prediction modeling, and achieve reliable predictions for multiple severities of highway traffic conflicts in basic road segments.