摘要:
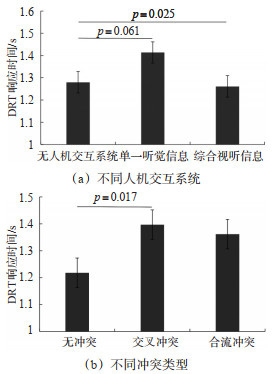
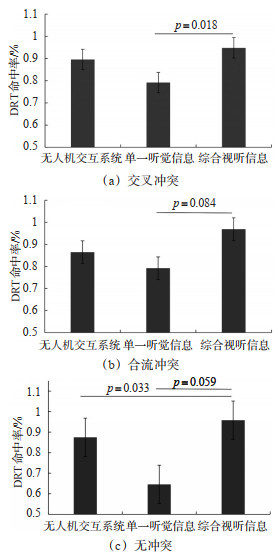
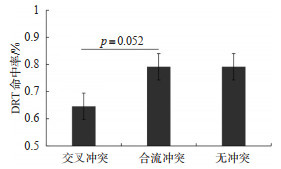
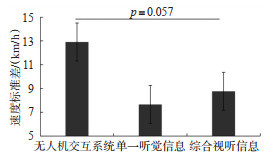
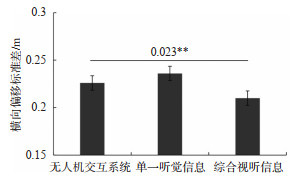
人机交互系统(human-machine interaction system, HMIs)在提升驾驶体验方面发挥着至关重要的作用。然而,额外交互信息的引入是否会导致驾驶人工作负荷超载以及其对行为绩效的影响尚不明确。为此,本研究招募29名被试进行驾驶模拟器试验,测量检测-响应任务(detection response task,DRT)、美国航空航天局认知负荷指数(national aeronautics and space administration task load index,NASA-TLX)和驾驶行为参数,分析不同人机交互系统和冲突类型下的驾驶人工作负荷和行为特性,并考虑其交互效应。结果表明:①DRT结果显示:在综合视听信息影响下,驾驶人的DRT响应时间减少12.1%且命中率增加5.8%~48.5%,意味着驾驶人建立了高级别的态势感知,能够分配更多认知资源响应DRT请求。此外,交叉冲突环境中的驾驶人需要频繁监控周边交通环境以确定其他道路使用者位置和运动轨迹,致使DRT响应时间增加14.8%,命中率减少22.6%;②基于NASA-TLX测量的主观负荷结果显示,综合视听信息作用下的个人努力维度得分减少21.7%~22.8%,驾驶人认为他们可以比其他人更轻松地达到预期性能水平;驾驶人感受到的时间压力减少19.8%,驾驶节奏舒缓且从容;挫败感维度得分减少31.4%~32.9%,不安全、气馁、烦躁、紧张和恼怒等负面情绪减少;③由于应对安全关键事件的充足空间和时间裕度,具有综合视听信息的驾驶人的速度标准差、加速噪声和横向偏移标准差分别减少32.1%、26.9%和7.1%,驾驶更加平稳、舒适感更强、车道保持能力和横向控制稳定性更好。