摘要:
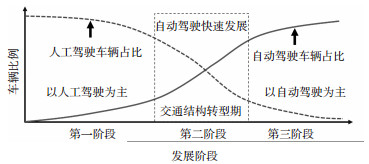
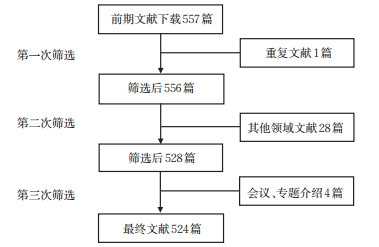
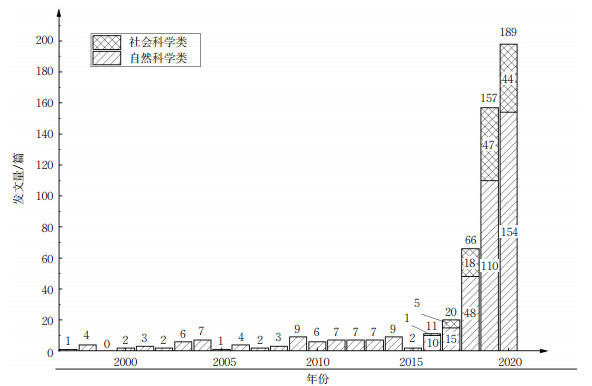
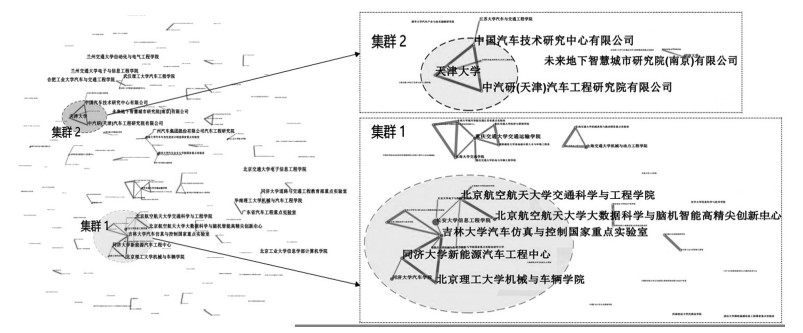
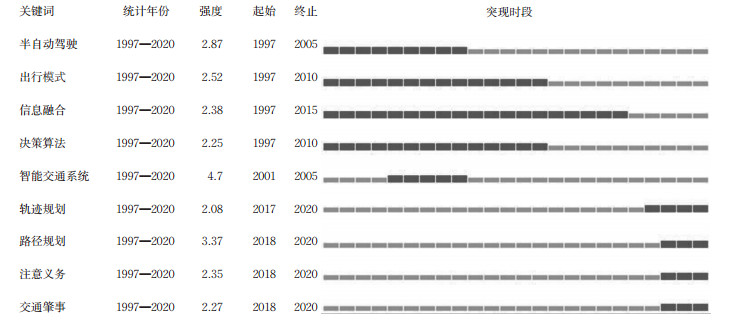
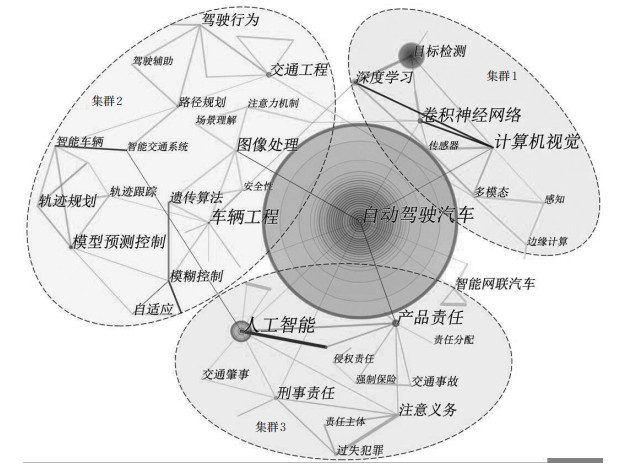
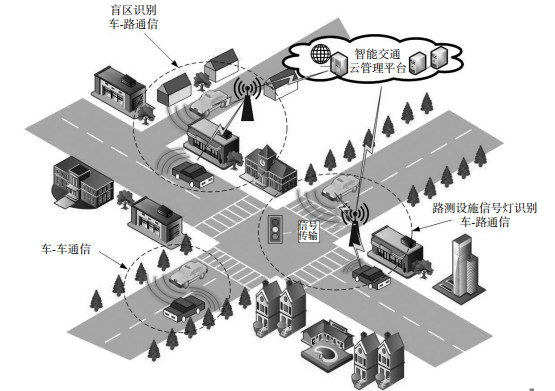
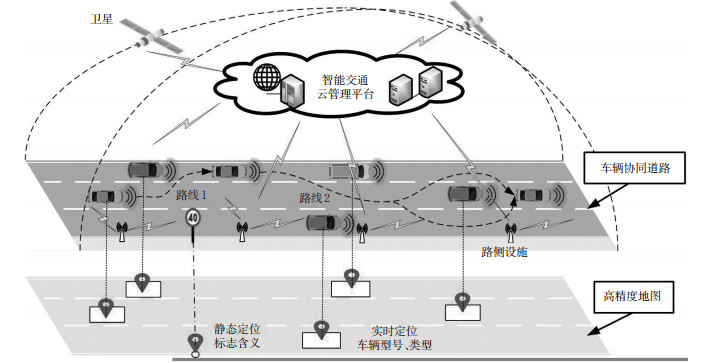
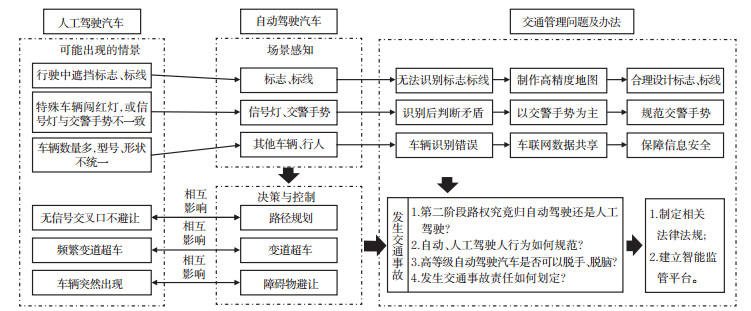
为了解混合驾驶环境下交通管理的研究现状和发展趋势,以“自动驾驶汽车”发展现状为基础,分析自动驾驶汽车在混合驾驶环境下存在的问题,基于Citespace文献计量工具,CNKI核心数据库近24年(1997—2020年)有关自动驾驶研究的文献为研究数据源,从发文年代、期刊来源、研究机构、关键词等进行文献计量和可视化分析,并生成各研究机构间的关系网络图谱及关键词共现网络图谱。结果表明:国内近5年自动驾驶发文量呈上升趋势;《中国公路学报》为发文量最高的期刊;自动驾驶汽车研究的方向主要包括:①目标检测及场景感知研究;②决策与控制;③交通事故责任划定研究。在未来混合驾驶环境下交通管理应结合车路协同、高精度地图技术,从标志标线设计、信号配时优化、路权归属、交通事故责任划定等方面进行研究,使道路运输更安全、高效、便捷。