

2025, 43(6): 1-10.
doi: 10.3963/j.jssn.1674-4861.2025.06.001
摘要:
随着社会经济发展,交通安全受到的重视程度越来越高,也要求传统的车载导航技术从时间最短的单一效率目标,转向交通效率与安全的综合优化。但现有研究仍存在数据维度不全、用户需求适配性低、多目标权衡难度大等问题,难以适配未来智能交通体系下的大规模应用场景。采用系统性文献综述方法,选取51篇核心非综述文献,围绕数据来源、交通安全水平度量及预测方法、考虑安全的寻路方法、技术验证这4个关键研究问题展开分析,总结领域研究现状与核心需求,为未来智能交通环境下导航技术的发展提供参考与建议。研究发现:数据来源层面,现有研究多依赖单一数据源,且未充分考虑交通场景中的实时、微观特征。采用的安全水平度量及预测方法则多缺乏对不同类型道路单元的因素差异的考虑,以及对于交通运行特征变化趋势的探究,且受数据统计难度与聚合逻辑复杂性影响,难以实现客观度量。考虑安全的寻路方法方面,多数研究将多目标简化为单目标进行优化,但其权重确定缺乏客观依据且动态适配能力不足;而基于最优前沿的寻路方法虽无需权重调整,却在实际求解中面临预设参数限制、计算效率偏低等问题。技术验证方面,真实路测的可靠性最优,但受成本约束难以大规模开展;基于真实数据的推演与交通仿真可有效降低测试成本,却存在实时动态交互信息缺失、与真实交通状况偏差较大等缺陷;主观感受验证虽能补充用户反馈维度信息,仍需权衡样本量、受试者类型带来的成本与有效性问题。针对后续研究,建议聚焦以下4个方向:①建立未来交通信息环境下导航关键数据体系;②在安全水平预测中融入实时交通态势推演;③结合驾驶人异质化驾驶风格与个性化需求,优化寻路技术;④融合大语言模型等新技术,以为导航技术提供智能交互能力支撑。
随着社会经济发展,交通安全受到的重视程度越来越高,也要求传统的车载导航技术从时间最短的单一效率目标,转向交通效率与安全的综合优化。但现有研究仍存在数据维度不全、用户需求适配性低、多目标权衡难度大等问题,难以适配未来智能交通体系下的大规模应用场景。采用系统性文献综述方法,选取51篇核心非综述文献,围绕数据来源、交通安全水平度量及预测方法、考虑安全的寻路方法、技术验证这4个关键研究问题展开分析,总结领域研究现状与核心需求,为未来智能交通环境下导航技术的发展提供参考与建议。研究发现:数据来源层面,现有研究多依赖单一数据源,且未充分考虑交通场景中的实时、微观特征。采用的安全水平度量及预测方法则多缺乏对不同类型道路单元的因素差异的考虑,以及对于交通运行特征变化趋势的探究,且受数据统计难度与聚合逻辑复杂性影响,难以实现客观度量。考虑安全的寻路方法方面,多数研究将多目标简化为单目标进行优化,但其权重确定缺乏客观依据且动态适配能力不足;而基于最优前沿的寻路方法虽无需权重调整,却在实际求解中面临预设参数限制、计算效率偏低等问题。技术验证方面,真实路测的可靠性最优,但受成本约束难以大规模开展;基于真实数据的推演与交通仿真可有效降低测试成本,却存在实时动态交互信息缺失、与真实交通状况偏差较大等缺陷;主观感受验证虽能补充用户反馈维度信息,仍需权衡样本量、受试者类型带来的成本与有效性问题。针对后续研究,建议聚焦以下4个方向:①建立未来交通信息环境下导航关键数据体系;②在安全水平预测中融入实时交通态势推演;③结合驾驶人异质化驾驶风格与个性化需求,优化寻路技术;④融合大语言模型等新技术,以为导航技术提供智能交互能力支撑。
2025, 43(6): 11-20.
doi: 10.3963/j.jssn.1674-4861.2025.06.002
摘要:
随着自动驾驶技术加速向规模化测试与商业化应用过渡,构建系统性的测试场景与评价指标体系已成为保障其安全落地的核心前提。本文对自动驾驶汽车测试场景构建与评价指标体系的研究现状、面临挑战及未来趋势进行了综述。发现在面对车路云一体化架构与动态混合交通流带来的复杂性,传统“里程-失效”统计模式已难以满足全链条性能评估需求。在测试场景体系方面,概述了测试范式向“场景驱动”演变的历程,总结了基于ISO 34501标准及PEGASUS六层模型的场景语义描述方法与主流生成技术,并指出当前体系主要存在长尾与边缘场景覆盖不足、标准规范碎片化严重、多维量化标准缺失,以及过分局限于单车智能封闭设计而忽视车辆无线通信技术(vehicle-to-everything,V2X)网联协同要素等问题。在测试指标体系方面,从竞赛型、封闭场地-仿真结合型及理论研究型3个维度对现有评价指标体系进行了归纳,指出当前指标体系在评估自动驾驶汽车利用V2X协同信息的能力方面存在不足、指标覆盖广度有限、评价维度与流程高度离散,以及客观交互体验量化指标缺失等问题。针对上述挑战,下一代测试体系需重点聚焦于以下研究路径:①构建通用的场景描述语言与数据共享框架,确立衡量场景风险关键性与真实性的统一量化基准;②构建涵盖从标称到长尾边界的分层递进场景体系以实现全域工况覆盖;③建立融合通信时延、系统韧性与社会伦理的综合评价指标以完善多维量化基准;④引入世界模型与生成式AI技术,结合因果推理机制模拟高风险极端工况并推演未知失效场景,以深度验证系统的泛化能力。
随着自动驾驶技术加速向规模化测试与商业化应用过渡,构建系统性的测试场景与评价指标体系已成为保障其安全落地的核心前提。本文对自动驾驶汽车测试场景构建与评价指标体系的研究现状、面临挑战及未来趋势进行了综述。发现在面对车路云一体化架构与动态混合交通流带来的复杂性,传统“里程-失效”统计模式已难以满足全链条性能评估需求。在测试场景体系方面,概述了测试范式向“场景驱动”演变的历程,总结了基于ISO 34501标准及PEGASUS六层模型的场景语义描述方法与主流生成技术,并指出当前体系主要存在长尾与边缘场景覆盖不足、标准规范碎片化严重、多维量化标准缺失,以及过分局限于单车智能封闭设计而忽视车辆无线通信技术(vehicle-to-everything,V2X)网联协同要素等问题。在测试指标体系方面,从竞赛型、封闭场地-仿真结合型及理论研究型3个维度对现有评价指标体系进行了归纳,指出当前指标体系在评估自动驾驶汽车利用V2X协同信息的能力方面存在不足、指标覆盖广度有限、评价维度与流程高度离散,以及客观交互体验量化指标缺失等问题。针对上述挑战,下一代测试体系需重点聚焦于以下研究路径:①构建通用的场景描述语言与数据共享框架,确立衡量场景风险关键性与真实性的统一量化基准;②构建涵盖从标称到长尾边界的分层递进场景体系以实现全域工况覆盖;③建立融合通信时延、系统韧性与社会伦理的综合评价指标以完善多维量化基准;④引入世界模型与生成式AI技术,结合因果推理机制模拟高风险极端工况并推演未知失效场景,以深度验证系统的泛化能力。
2025, 43(6): 21-32.
doi: 10.3963/j.jssn.1674-4861.2025.06.003
摘要:
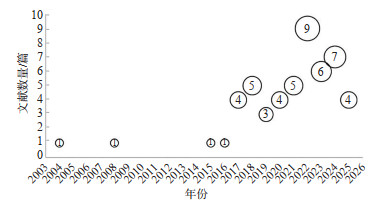
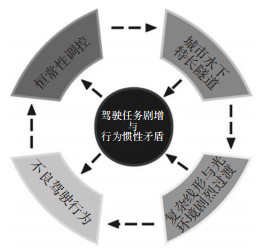
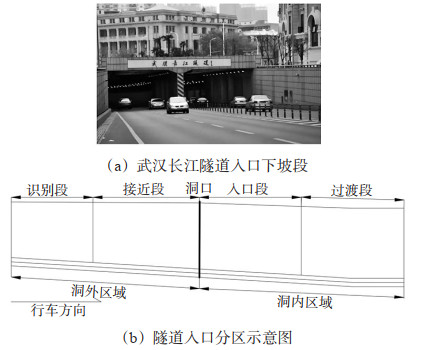
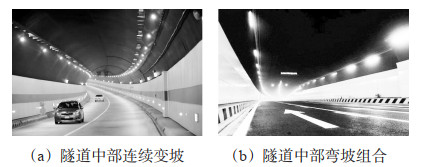
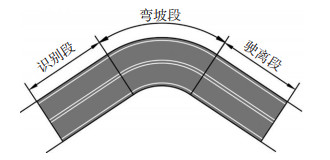
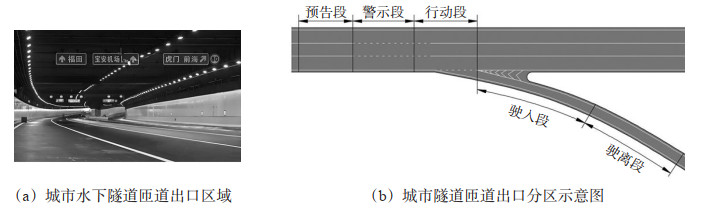
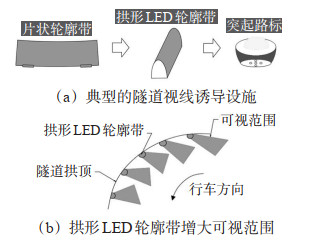
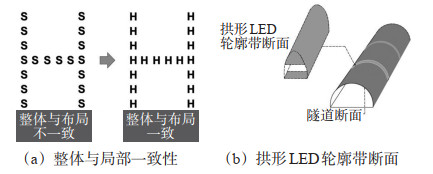
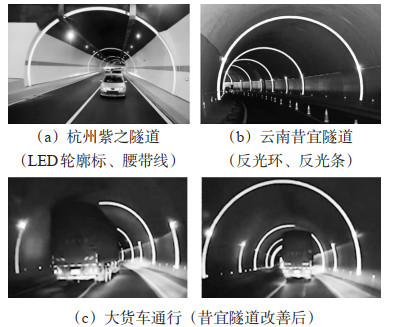
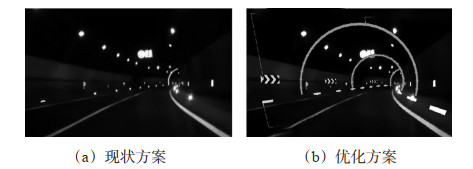
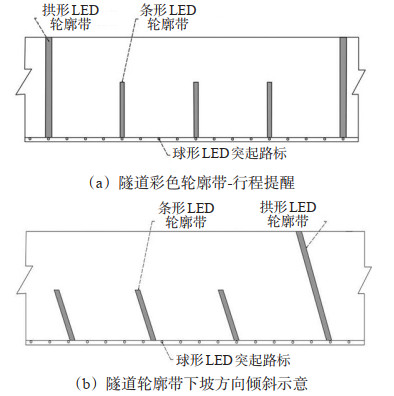
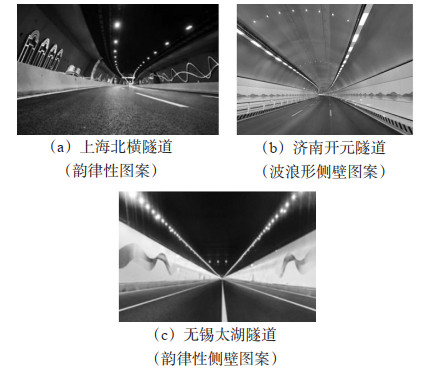
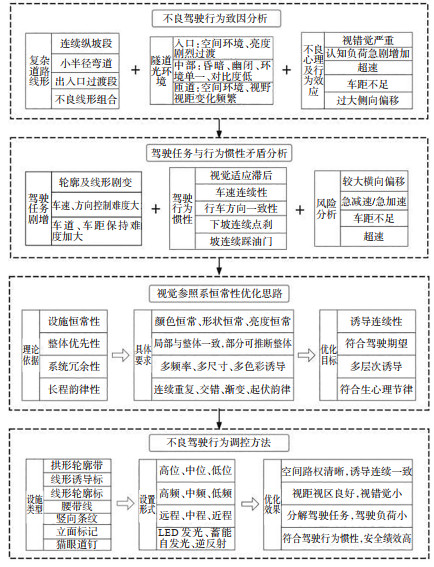
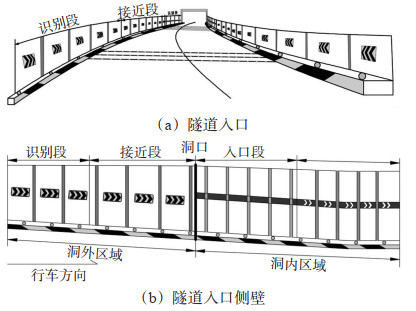
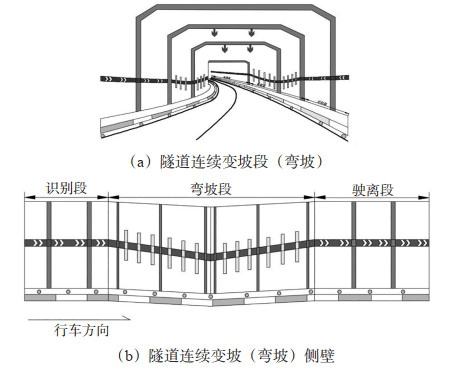
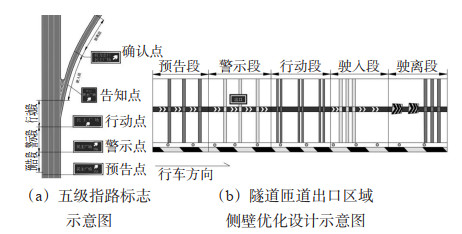
城市水下特长隧道普遍存在匝道出入口密集、线形复杂多变及光环境过渡剧烈等典型特征,导致驾驶任务突变、驾驶负荷剧烈增加,与隧道长距离驾驶行为惯性存在显著矛盾,易诱发超速、车距不足、车道偏离等不良驾驶行为,进而加剧事故风险。因此,本文在系统梳理城市水下特长隧道复杂环境特征、驾驶行为规律,以及调控方法基础上,基于“城市水下特长隧道—复杂线形与剧烈光环境过渡—驾驶任务剧增与行为惯性矛盾—不良驾驶行为—恒常性调控”的逻辑链,对隧道入口区域、连续变坡路段、匝道出口区域等重点路段进行合理分区。分析各区段驾驶任务变动与驾驶行为惯性的矛盾,构建城市水下特长隧道不良驾驶行为及调控研究框架。研究提出隧道视觉参照系恒常性优化思路:复杂线形路段视觉参照系增强与过渡区域视觉参照系缓和变动;可通过具备设施恒常性、系统整体优先性、系统冗余性及长程韵律性的恒常型视线诱导系统实现。现有实践表明,恒常型视线诱导系统符合驾驶人心理预期,有效分解驾驶任务,提升水下特长隧道入口区域、连续变坡路段、匝道出口区域等路段的安全性。恒常型视线诱导系统有助于调控城市水下特长隧道复杂线形路段不良驾驶行为,实现隧道照明节能与行车安全舒适的协调统一。
城市水下特长隧道普遍存在匝道出入口密集、线形复杂多变及光环境过渡剧烈等典型特征,导致驾驶任务突变、驾驶负荷剧烈增加,与隧道长距离驾驶行为惯性存在显著矛盾,易诱发超速、车距不足、车道偏离等不良驾驶行为,进而加剧事故风险。因此,本文在系统梳理城市水下特长隧道复杂环境特征、驾驶行为规律,以及调控方法基础上,基于“城市水下特长隧道—复杂线形与剧烈光环境过渡—驾驶任务剧增与行为惯性矛盾—不良驾驶行为—恒常性调控”的逻辑链,对隧道入口区域、连续变坡路段、匝道出口区域等重点路段进行合理分区。分析各区段驾驶任务变动与驾驶行为惯性的矛盾,构建城市水下特长隧道不良驾驶行为及调控研究框架。研究提出隧道视觉参照系恒常性优化思路:复杂线形路段视觉参照系增强与过渡区域视觉参照系缓和变动;可通过具备设施恒常性、系统整体优先性、系统冗余性及长程韵律性的恒常型视线诱导系统实现。现有实践表明,恒常型视线诱导系统符合驾驶人心理预期,有效分解驾驶任务,提升水下特长隧道入口区域、连续变坡路段、匝道出口区域等路段的安全性。恒常型视线诱导系统有助于调控城市水下特长隧道复杂线形路段不良驾驶行为,实现隧道照明节能与行车安全舒适的协调统一。
2025, 43(6): 33-41.
doi: 10.3963/j.jssn.1674-4861.2025.06.004
摘要:
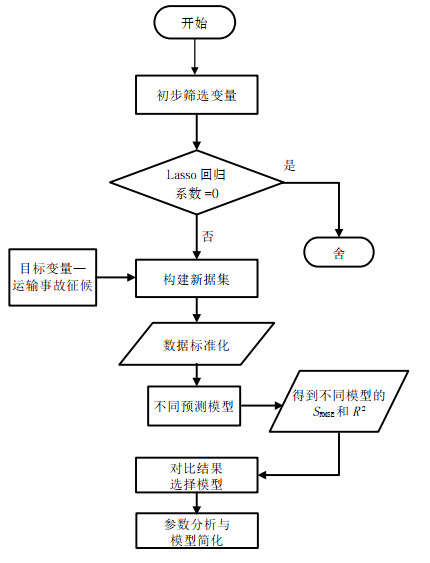
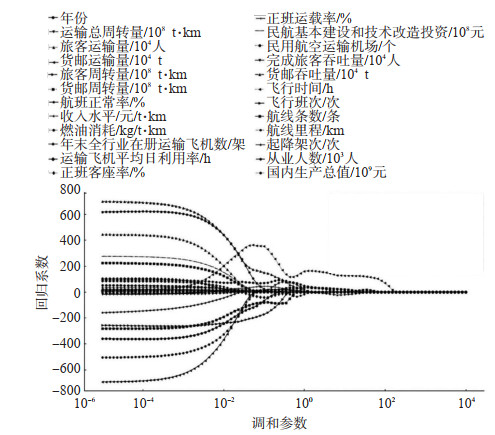
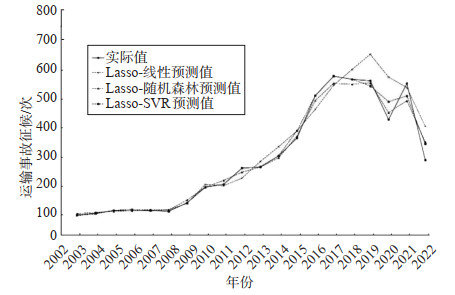
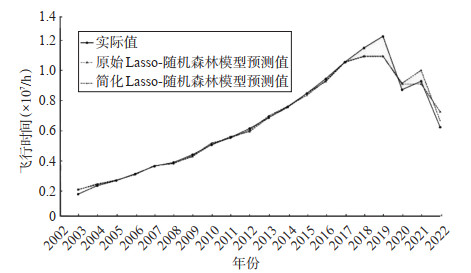
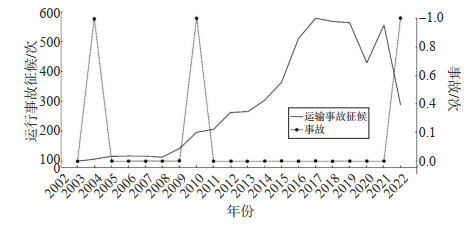
随着航空安全水平的不断提升,运输事故呈现出小样本、低概率特征,传统基于历史数据的预测方法难以充分刻画当前航空运行风险演化规律,难以满足安全管理的精细化和个性化需求。针对低概率事故样本不足、直接预测不稳定的问题,研究了基于最小绝对收缩与选择算子回归(least absolute shrinkage and selection operator,Lasso)-随机森林模型预测运输事故征候的安全目标水平计算方法。在综合考虑航空运输规模、运行效率、资源投入,以及运行强度等多维因素的基础上,初步构建运输事故征候影响因素集,引入Lasso回归通过时间序列交叉验证方法进行特征筛选,有效缓解小样本条件下多变量共线性问题,提高特征选择的稳定性与合理性。采用随机森林模型对运输事故征候进行预测,通过特征重要性分析与误差驱动的模型简化策略,提高模型的预测精度并且在保证精度的同时降低模型复杂度,提高实用性。以中国2003—2022年民航运行数据为样本进行验证,结果表明:Lasso-随机森林模型具有最低标准化均方根误差(standardized root mean square error,SRMSE)值(45.2)和最高决定系数R2值(0.834),在预测精度上显著优于线性回归和支持向量机(supportvector regression,SVR)预测模型。模型简化后SRMSE比原模型进一步降低6.14%。基于简化后的模型对2023年飞行时间和事故征候次数进行预测,得航路上航空器碰撞的安全目标水平为符合标准。
随着航空安全水平的不断提升,运输事故呈现出小样本、低概率特征,传统基于历史数据的预测方法难以充分刻画当前航空运行风险演化规律,难以满足安全管理的精细化和个性化需求。针对低概率事故样本不足、直接预测不稳定的问题,研究了基于最小绝对收缩与选择算子回归(least absolute shrinkage and selection operator,Lasso)-随机森林模型预测运输事故征候的安全目标水平计算方法。在综合考虑航空运输规模、运行效率、资源投入,以及运行强度等多维因素的基础上,初步构建运输事故征候影响因素集,引入Lasso回归通过时间序列交叉验证方法进行特征筛选,有效缓解小样本条件下多变量共线性问题,提高特征选择的稳定性与合理性。采用随机森林模型对运输事故征候进行预测,通过特征重要性分析与误差驱动的模型简化策略,提高模型的预测精度并且在保证精度的同时降低模型复杂度,提高实用性。以中国2003—2022年民航运行数据为样本进行验证,结果表明:Lasso-随机森林模型具有最低标准化均方根误差(standardized root mean square error,SRMSE)值(45.2)和最高决定系数R2值(0.834),在预测精度上显著优于线性回归和支持向量机(supportvector regression,SVR)预测模型。模型简化后SRMSE比原模型进一步降低6.14%。基于简化后的模型对2023年飞行时间和事故征候次数进行预测,得航路上航空器碰撞的安全目标水平为符合标准。
2025, 43(6): 42-53.
doi: 10.3963/j.jssn.1674-4861.2025.06.005
摘要:
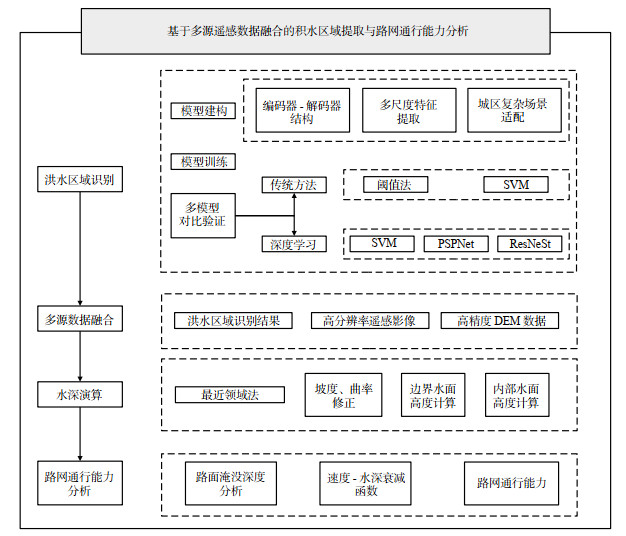
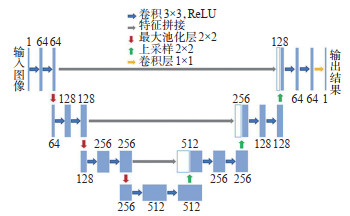
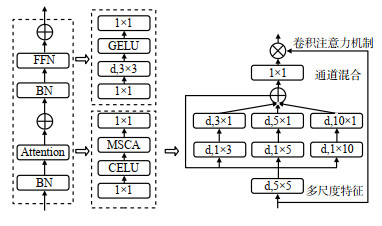
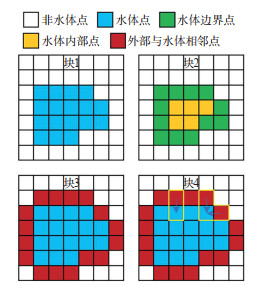
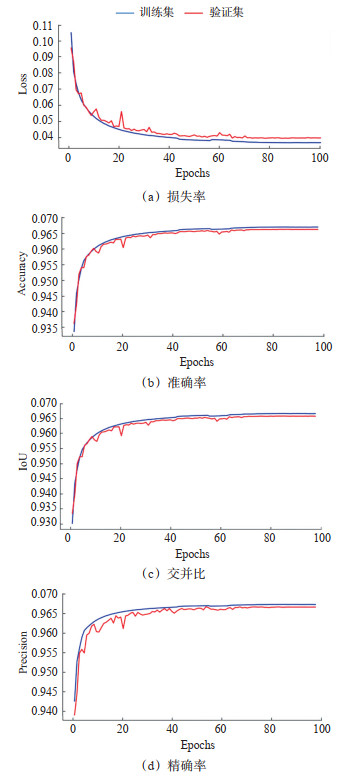
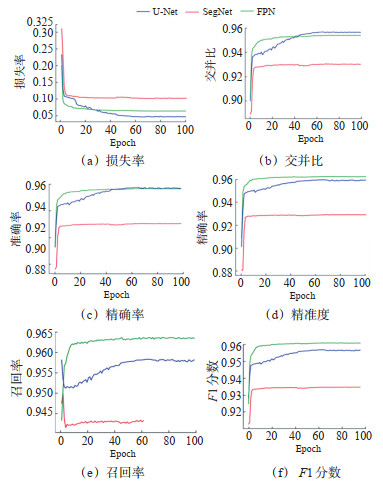
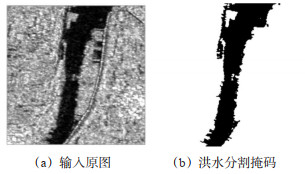
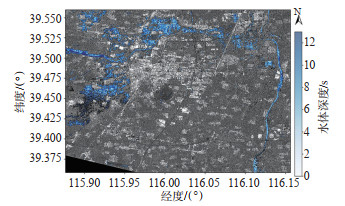
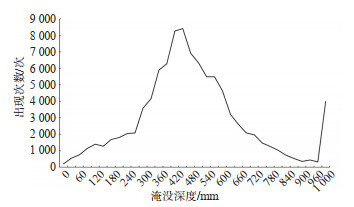
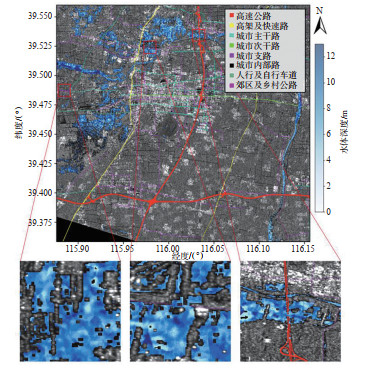
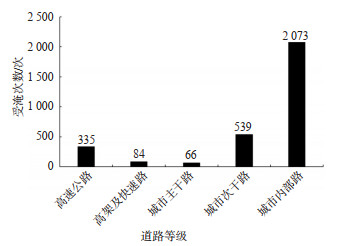
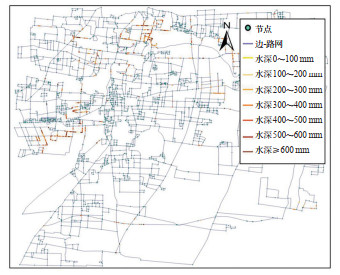
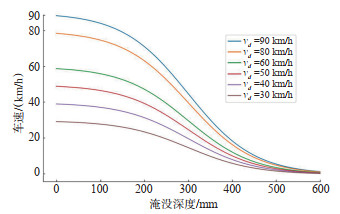
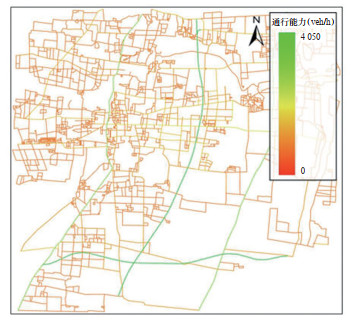
针对洪涝灾害动态演进过程中城市交通风险难以准确量化分析的问题,研究了基于深度学习的洪水区域高精度提取方法,通过动态水动力仿真进行了城市道路在洪涝灾害中的通行能力分析,构建了涵盖洪水识别、水深计算、通行能力分析的动态路网通行评估框架。该方法融合了多时相合成孔径雷达(synthetic aperture radar,SAR)影像、光学影像和高分辨率数字高程模型(digital elevation model,DEM)数据,采用U-Net深度学习模型实现洪水区域的精准提取。基于融合遥感数据与地理信息,结合坡度、曲率等地形因子,构建洪水水位边界模型,并结合实测降水和地类信息驱动的动态水流仿真,叠加水深动态变化栅格与矢量化道路网络数据。同时,建立道路拓扑结构和通行能力更新机制,构建针对不同道路等级的水深与车速衰减模型,量化水深对通行速度的影响。基于这个模型,生成了多时刻的通行能力变化图谱,并通过复杂网络指标对路网连通性进行了量化评估。结果表明:该方法有效应对了阴影干扰、建筑物遮挡等挑战,显著提高了洪水区域分割的准确性。洪水区域识别部分的交并比和F1分数分别达到了97.56%和97.79%,优于主流模型支持向量机(support vector regression,SVR),各项指标均提升了5%左右。分析显示:在降雨量270.76 mm的情况下,城市内部道路和支路的平均水深显著高于主干道路与高速通道,水深的增加导致道路通行速度平均下降至原值的86.8%左右,城市道路通行能力平均下降约13.2%,而城市主干道的通行能力保持率为83.3%,表明高等级道路仍具备一定的应急通行潜力。此外,洪水淹没后路网结构显著退化,网络整体连通性大幅下降,节点连通性比洪水前减少了58.2%。
针对洪涝灾害动态演进过程中城市交通风险难以准确量化分析的问题,研究了基于深度学习的洪水区域高精度提取方法,通过动态水动力仿真进行了城市道路在洪涝灾害中的通行能力分析,构建了涵盖洪水识别、水深计算、通行能力分析的动态路网通行评估框架。该方法融合了多时相合成孔径雷达(synthetic aperture radar,SAR)影像、光学影像和高分辨率数字高程模型(digital elevation model,DEM)数据,采用U-Net深度学习模型实现洪水区域的精准提取。基于融合遥感数据与地理信息,结合坡度、曲率等地形因子,构建洪水水位边界模型,并结合实测降水和地类信息驱动的动态水流仿真,叠加水深动态变化栅格与矢量化道路网络数据。同时,建立道路拓扑结构和通行能力更新机制,构建针对不同道路等级的水深与车速衰减模型,量化水深对通行速度的影响。基于这个模型,生成了多时刻的通行能力变化图谱,并通过复杂网络指标对路网连通性进行了量化评估。结果表明:该方法有效应对了阴影干扰、建筑物遮挡等挑战,显著提高了洪水区域分割的准确性。洪水区域识别部分的交并比和F1分数分别达到了97.56%和97.79%,优于主流模型支持向量机(support vector regression,SVR),各项指标均提升了5%左右。分析显示:在降雨量270.76 mm的情况下,城市内部道路和支路的平均水深显著高于主干道路与高速通道,水深的增加导致道路通行速度平均下降至原值的86.8%左右,城市道路通行能力平均下降约13.2%,而城市主干道的通行能力保持率为83.3%,表明高等级道路仍具备一定的应急通行潜力。此外,洪水淹没后路网结构显著退化,网络整体连通性大幅下降,节点连通性比洪水前减少了58.2%。
2025, 43(6): 54-66.
doi: 10.3963/j.jssn.1674-4861.2025.06.006
摘要:
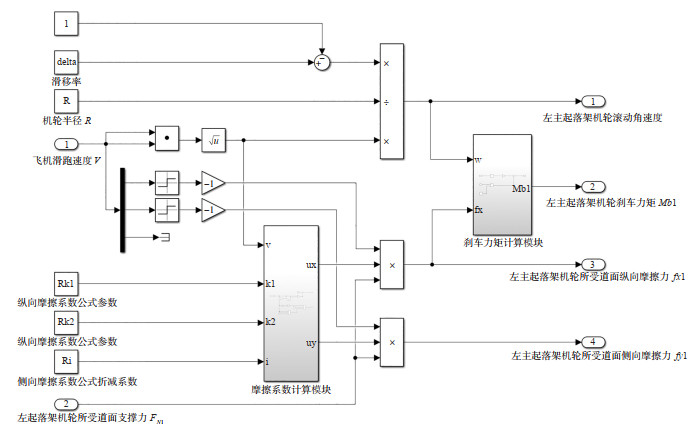
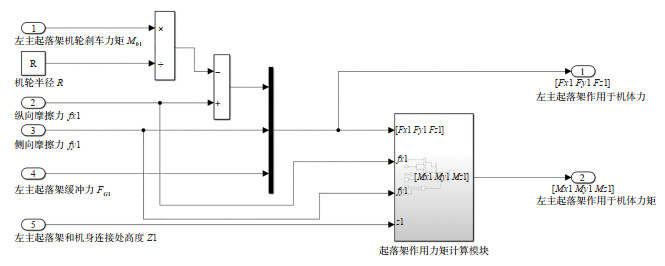
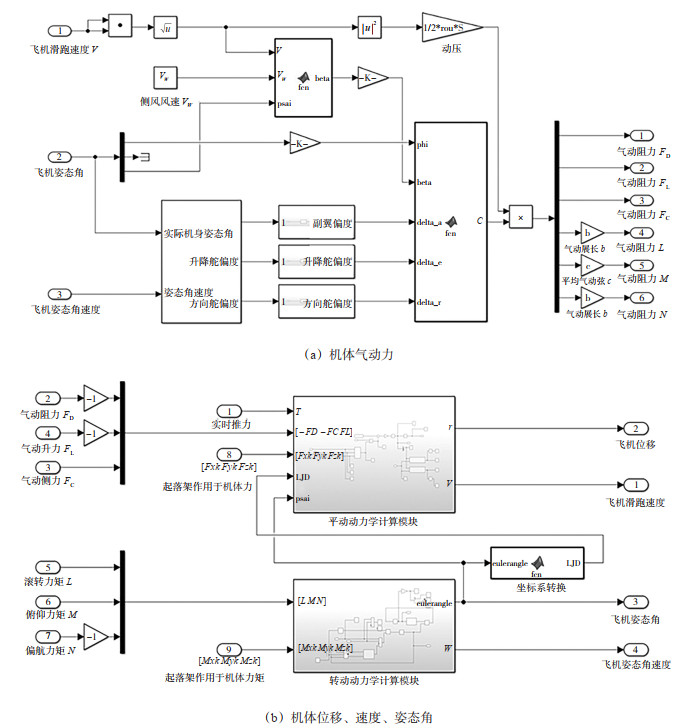
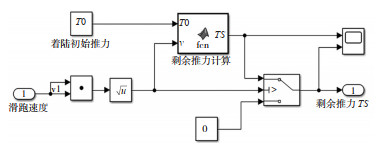
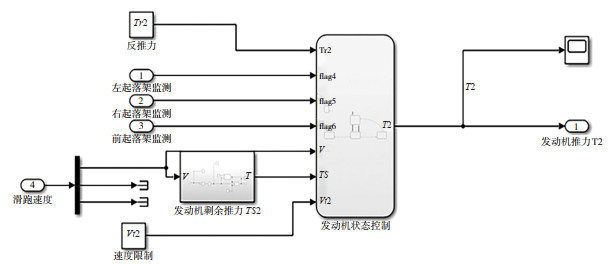
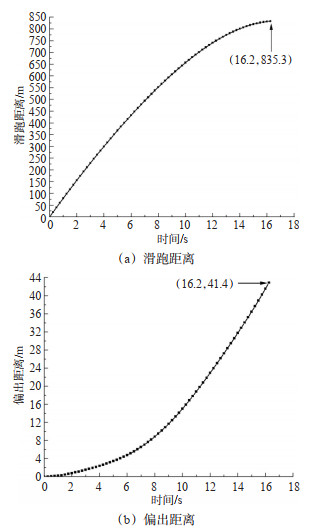
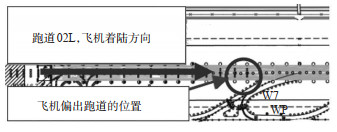
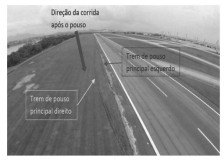
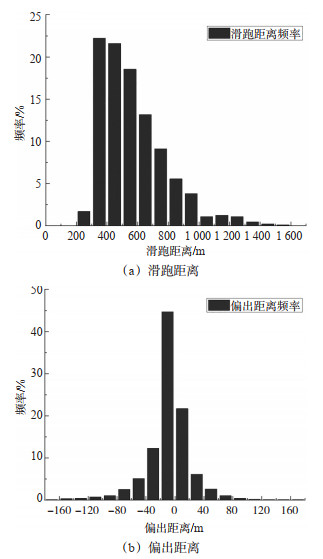
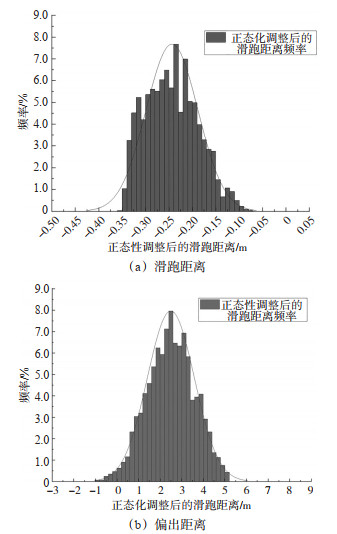
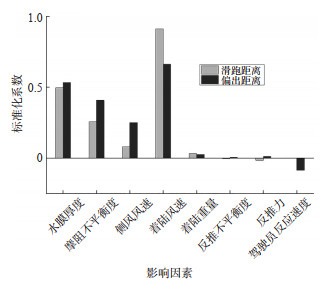
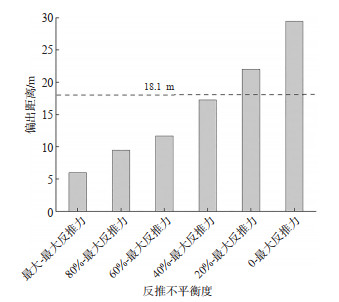
针对航空运输安全领域飞机冲偏出跑道事故频发问题,进行了飞机着陆滑跑状态影响因素量化分析,建立了冲偏出跑道预测模型。基于Simulink软件以空客A320-214机型为研究对象,新增发动机推力动态模块,构建了包含驾驶员、飞机机体、侧风与湿滑道面的飞机着陆滑跑人-机-环境耦合动力学模型,进行飞机着陆滑跑状态人机闭环仿真,获得3 191组仿真数据。采用多元线性回归分析方法量化分析水膜厚度、驾驶员反应速度、着陆接地时刻地速等影响因素对飞机冲偏出跑道的影响,分析反推不平衡度影响偏出距离的影响机制,建立多元线性回归飞机着陆滑跑预测模型。得到以下结论:飞机在着陆滑跑时,着陆接地时刻地速对滑跑距离的影响要比对偏出距离影响更大,而水膜厚度、摩阻不平衡度以及侧风风速等环境因素更容易导致飞机偏出跑道;其中,摩阻不平衡度对偏航方向的影响最为突出,其影响程度达到反推不平衡度的14.5倍,而反推不平衡度的影响居于第2位;当反推不平衡度达到0.4时,偏出距离已逼近安全阈值,具有实质偏出风险;多元线性回归滑跑距离预测模型的决定系数(R2)为0.88、平均绝对误差(mean absolute error,MAE)为48.32 m、平均绝对百分比误差(mean absolute percentage error,MAPE)为7.75%,对实际案例的预测偏差均在5%以内,体现出该模型对飞机着陆滑跑距离预测具有较为优越的准确性。
针对航空运输安全领域飞机冲偏出跑道事故频发问题,进行了飞机着陆滑跑状态影响因素量化分析,建立了冲偏出跑道预测模型。基于Simulink软件以空客A320-214机型为研究对象,新增发动机推力动态模块,构建了包含驾驶员、飞机机体、侧风与湿滑道面的飞机着陆滑跑人-机-环境耦合动力学模型,进行飞机着陆滑跑状态人机闭环仿真,获得3 191组仿真数据。采用多元线性回归分析方法量化分析水膜厚度、驾驶员反应速度、着陆接地时刻地速等影响因素对飞机冲偏出跑道的影响,分析反推不平衡度影响偏出距离的影响机制,建立多元线性回归飞机着陆滑跑预测模型。得到以下结论:飞机在着陆滑跑时,着陆接地时刻地速对滑跑距离的影响要比对偏出距离影响更大,而水膜厚度、摩阻不平衡度以及侧风风速等环境因素更容易导致飞机偏出跑道;其中,摩阻不平衡度对偏航方向的影响最为突出,其影响程度达到反推不平衡度的14.5倍,而反推不平衡度的影响居于第2位;当反推不平衡度达到0.4时,偏出距离已逼近安全阈值,具有实质偏出风险;多元线性回归滑跑距离预测模型的决定系数(R2)为0.88、平均绝对误差(mean absolute error,MAE)为48.32 m、平均绝对百分比误差(mean absolute percentage error,MAPE)为7.75%,对实际案例的预测偏差均在5%以内,体现出该模型对飞机着陆滑跑距离预测具有较为优越的准确性。


2025, 43(6): 67-75.
doi: 10.3963/j.jssn.1674-4861.2025.06.007
摘要:
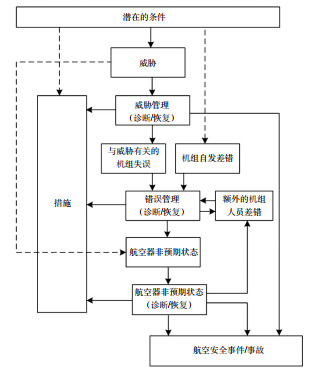
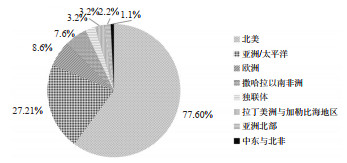
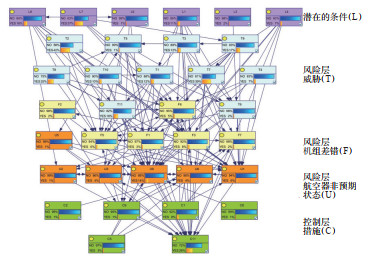
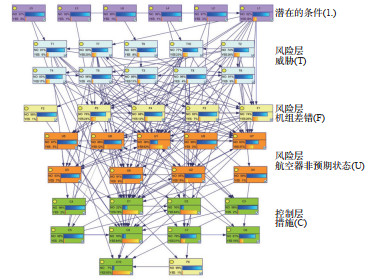
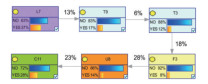
为深入探究不同等级后果事件致因关联研究不足的问题,基于“安全Ⅱ”视角,以可控飞行撞地(controlled flight into terrain,CFIT)类高风险事件为例,分析不同后果样本事件致因及其关联性。选取航空安全网(aviation safety network,ASN)128篇、航空安全报告系统(aviation safety reporting system,ASRS)354篇CFIT事件为样本,依据威胁与差错管理模型(threat and error management,TEM)分析事件潜在的条件、威胁、机组差错、航空器非预期状态和措施,识别出3 367个致因因素和2 169条因果/时序关系,经语义分析整合、因果/时序关系梳理建立基于46个贝叶斯网络节点的样本事件演化网络模型;依据贝叶斯网络和关联规则计算节点间先验概率、条件概率及相关性,确定样本事件高概率节点和链路。结果表明:①运行压力—机组疲劳—失去情景意识—错误设置高度表—航空器偏离高度路径是导致CFIT事故的高风险路径;②机组疲劳(57%)、航司/局方管理不足(17%)等消极因素出现时,发生可控飞行撞地事故概率增加24%;③从“安全Ⅱ”的视角展开研究,航空系统的应对措施(78%)和执行改出动作(84%)等积极因素生效时,稳定进近的概率增加34%,可有效降低发生可控飞行撞地的发生风险。
为深入探究不同等级后果事件致因关联研究不足的问题,基于“安全Ⅱ”视角,以可控飞行撞地(controlled flight into terrain,CFIT)类高风险事件为例,分析不同后果样本事件致因及其关联性。选取航空安全网(aviation safety network,ASN)128篇、航空安全报告系统(aviation safety reporting system,ASRS)354篇CFIT事件为样本,依据威胁与差错管理模型(threat and error management,TEM)分析事件潜在的条件、威胁、机组差错、航空器非预期状态和措施,识别出3 367个致因因素和2 169条因果/时序关系,经语义分析整合、因果/时序关系梳理建立基于46个贝叶斯网络节点的样本事件演化网络模型;依据贝叶斯网络和关联规则计算节点间先验概率、条件概率及相关性,确定样本事件高概率节点和链路。结果表明:①运行压力—机组疲劳—失去情景意识—错误设置高度表—航空器偏离高度路径是导致CFIT事故的高风险路径;②机组疲劳(57%)、航司/局方管理不足(17%)等消极因素出现时,发生可控飞行撞地事故概率增加24%;③从“安全Ⅱ”的视角展开研究,航空系统的应对措施(78%)和执行改出动作(84%)等积极因素生效时,稳定进近的概率增加34%,可有效降低发生可控飞行撞地的发生风险。



交通信息与安全
Journal of Transport Information and Safety
(1983年创刊 双月刊 )
曾用刊名:《交通与计算机》
主管单位:中华人民共和国教育部
主办单位:武汉理工大学
协办单位:
中国人工智能学会智能交通专业委员会
主 编:钟鸣
副 主 编:马勇 胡钊政 杜志刚
领域主编:陈再刚 杜文博 吕能超
黄亚敏 郑士源
执行主编:徐堃
编辑出版:
《交通信息与安全》编辑部
地 址:
湖北省武汉市武昌区和平大道武汉理工大学余家头校区125信箱
邮 编:430063
电话/传真:027-86580355
E-mail:jtjsj@vip.163.com
官方网站:http://www.jtxa.net/
邮发代号:38-94
国内刊号:CN 42-1781/U
国际刊号:ISSN 1674-4861
期刊收录
- 《中文核心期刊要目总览》入编期刊
- 中国科学引文数据库(CSCD)来源期刊
- 中国科技核心期刊
- RCCSE中国核心学术期刊(A)
- 中国学术期刊综合评价数据库(CAJ-CED)收录
- 中国科技论文与引文数据库(CSTPCD)收录
- 中国核心期刊(遴选)数据库收录
- 中文科技期刊数据库收录
- 中国期刊网(CNKI)收录
- 《中国学术期刊(光盘版)收录》
- 中国终身教育学术研究数据库总库收录
- 日本科学技术振兴机构数据库(JST)收录
- 《世界期刊影响力指数(WJCI)报告》(2020科技版)