

An Analysis and Prediction Model of Aircraft Landing States on Wet Runways with Crosswind Based on Taxiing Dynamics Model
-
摘要: 针对航空运输安全领域飞机冲偏出跑道事故频发问题,进行了飞机着陆滑跑状态影响因素量化分析,建立了冲偏出跑道预测模型。基于Simulink软件以空客A320-214机型为研究对象,新增发动机推力动态模块,构建了包含驾驶员、飞机机体、侧风与湿滑道面的飞机着陆滑跑人-机-环境耦合动力学模型,进行飞机着陆滑跑状态人机闭环仿真,获得3 191组仿真数据。采用多元线性回归分析方法量化分析水膜厚度、驾驶员反应速度、着陆接地时刻地速等影响因素对飞机冲偏出跑道的影响,分析反推不平衡度影响偏出距离的影响机制,建立多元线性回归飞机着陆滑跑预测模型。得到以下结论:飞机在着陆滑跑时,着陆接地时刻地速对滑跑距离的影响要比对偏出距离影响更大,而水膜厚度、摩阻不平衡度以及侧风风速等环境因素更容易导致飞机偏出跑道;其中,摩阻不平衡度对偏航方向的影响最为突出,其影响程度达到反推不平衡度的14.5倍,而反推不平衡度的影响居于第2位;当反推不平衡度达到0.4时,偏出距离已逼近安全阈值,具有实质偏出风险;多元线性回归滑跑距离预测模型的决定系数(R2)为0.88、平均绝对误差(mean absolute error,MAE)为48.32 m、平均绝对百分比误差(mean absolute percentage error,MAPE)为7.75%,对实际案例的预测偏差均在5%以内,体现出该模型对飞机着陆滑跑距离预测具有较为优越的准确性。Abstract: To address the frequent occurrence of runway excursion accidents in aviation safety, this study conducts a quantitative analysis of the factors influencing aircraft landing taxiing states and establishes a corresponding prediction model. A human-aircraft-environment coupled dynamics model for aircraft landing taxiing is developed in Simulink, focusing on the Airbus A320-214. This model incorporates a dynamic engine thrust module and integrates pilot operations, aircraft dynamics, crosswind, and wet runway surface conditions. Closed-loop simulations yield 3, 191 sets of data for analysis. The influence of various factors, such as water film thickness, pilot reaction speed, and touchdown ground speed, on runway excursions is quantified using multiple linear regression. The mechanism of thrust reverser imbalance affecting deviation distance is analyzed, leading to the establishment of predictive models for landing taxiing distance and deviation distance. The findings indicate that during landing taxiing, touchdown ground speed has a greater impact on taxiing distance than on deviation distance. Environmental factors like water film thickness, friction imbalance, and crosswind velocity are more likely to cause runway deviations. Among these, friction imbalance has the most pronounced effect on yaw direction, exceeding the impact of thrust reverser imbalance by a factor of 14.5, which ranks as the second most influential factor. Under specified conditions, a thrust reverser imbalance exceeding 0.4 pushes the deviation distance close to the safety threshold, representing a substantial risk. The multiple linear regression model for taxiing distance prediction demonstrates a coefficient of determination (R2) of 0.88, a mean absolute error (MAE) of 48.32 m, and a mean absolute percentage error (MAPE) of 7.75%. Prediction deviations for actual cases remain within 5%, indicating superior accuracy of the model for predicting aircraft landing taxiing distance.
-
Key words:
- aviation safety /
- wet runway pavement /
- crosswind /
- landing distance /
- offset distance
-

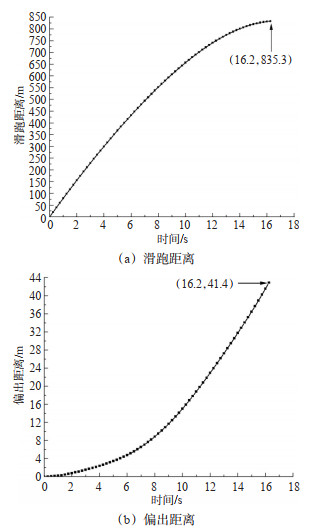
图 7 飞机滑跑距离和偏出距离计算结果
Figure 7. Calculation results of aircraft glide distance and yaw distance

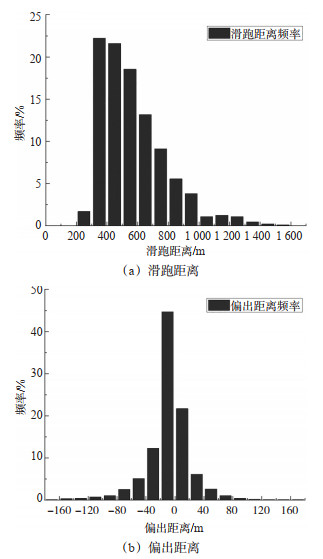
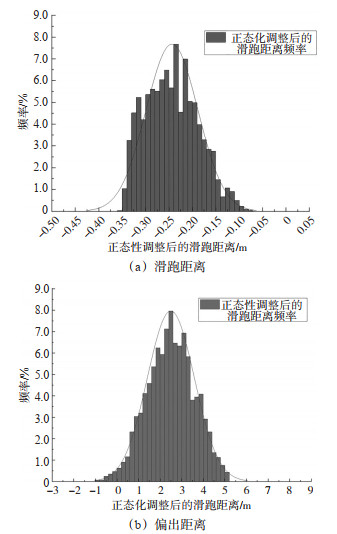
图 11 滑跑距离与偏出距离频率分布直方图
Figure 11. Histogram of the frequency distribution of the running distance and the deflection distance

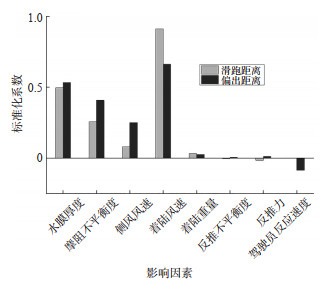
图 13 飞机着陆滑跑距离与偏出距离标准化系数图
Figure 13. Diagram of the normalization coefficient of the landing run distance and the deflection distance of the aircraft

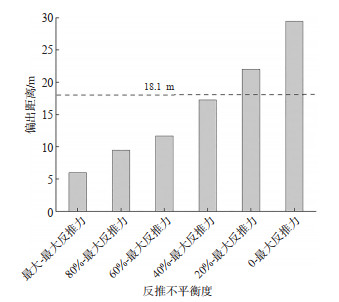
图 14 反推不平衡度对偏出距离的影响
Figure 14. Effect of the inference imbalance on the deviation distance
表 1 PID控制参数
Table 1. PID control parameters
通道 KP KI KD 滚转 1.39 1.27 0.48 俯仰 7.64 9.38 1.86 偏航 -4.28 -6.44 2.15  下载: 导出CSV
下载: 导出CSV
表 2 发动机剩余推力参数
Table 2. Parameters of engine residual thrust
参数 取值×10-3 k1 259 k2 0.22 k3 993.6 k4 2.87 k5 1.44 k6 1.8
下载: 导出CSV
表 3 模型减速收益
Table 3. Revenue statement of model deceleration
速度/(m/s) 滑跑距离/m 收益kS/% 滑跑时间/s 收益kT/% 有反推 无反推 有反推 无反推 66.9 563.9 663.4 85.0 9.63 11.2 86.0 70.0 585.8 697.5 84.0 10.54 12.4 85.0 72.0 612.5 729.2 84.0 11.2 13.2 85.0 75.0 651.7 766.7 85.0 12.6 14.6 86.0
下载: 导出CSV
表 4 滑跑速度与距离的验证结果
Table 4. Verification results of running speed and distance
案例 项目 实际值 预测值 时刻1 时刻2 时刻3 滑跑速度/( m/s) 55.1 55.1 53.50 52.22 偏出距离/m 15.0 12.4 13.8 15.0 新加坡樟宜机场 滑跑距离/m 840.0 821.4 840.0 857.3 滑跑速度误差/% 0.0 2.7 5.1 偏出距离误差/% 17.3 8.0 0.0 滑跑距离误差/% 2.3 0.0 2.0 偏出距离/m 33.0 32.4 35.7 36.5 德国汉诺威机场 滑跑距离/m 572.0 557.4 570.4 597.6 偏出距离误差/% 1.8 8.2 10.6 滑跑距离误差/% 2.6 0.2 4.5 滑跑速度/( m/s) 62.3 63.0 61.9 60.7 偏出距离/m 33.5 30.9 32.4 33.0 巴西若宾机场 滑跑距离/m 916.0 889.3 930.5 978.4 滑跑速度误差/% 1.2 0.5 2.6 偏出距离误差/% 7.8 3.3 1.5 滑跑距离误差/% 2.9 1.6 6.8
下载: 导出CSV
表 5 飞机动力学模型的着陆滑跑工况
Table 5. Landing runway condition table for aircraft dynamics model
序号 着陆重量/kg 着陆接地时刻地速/(m/s) 发动机反推档位 驾驶员反应速度 1 55 000 60 3-3 正常 2 55 000 65 3-4 较迟缓 3 55 000 70 3-5 迟缓 4 55 000 75 5-3 正常 5 55 000 80 4-4 较迟缓 6 57 000 60 4-5 迟缓 7 57 000 65 4-3 正常 8 57 000 70 5-4 较迟缓 9 57 000 75 5-5 迟缓 10 57 000 80 3-2 正常 11 60 000 60 3-1 较迟缓 12 60 000 65 4-2 迟缓 13 60 000 70 4-1 正常 14 60 000 75 5-2 较迟缓 15 60 000 80 5-1 迟缓 16 62 000 60 2-3 正常 17 62 000 65 2-4 较迟缓 18 62 000 70 2-5 迟缓 19 62 000 75 1-3 正常 20 62 000 80 1-4 较迟缓 21 64 500 60 1-5 迟缓 22 64 500 65 3-3 正常 23 64 500 70 4-4 较迟缓 24 64 500 75 5-5 迟缓 25 64 500 80 5-5 较迟缓
下载: 导出CSV
表 6 各变量的峰度与偏度
Table 6. Kurtosis and skewness of each variable
偏度检验统计量 滑跑距离y1 偏出距离y2 偏度 1.244 -0.476 偏度标准误差 0.043 0.043 峰度 1.773 5.547 峰度标准误差 0.087 0.087
下载: 导出CSV
表 7 柯尔莫哥洛夫·斯米诺夫检验检验结果
Table 7. Kolmogorov Sminov test results
K-S统计量 滑跑距离Y1 偏出距离Y2 自由度 3 191 3 191 显著性 0.057 0.72
下载: 导出CSV
表 8 多元回归模型成立的关键参数
Table 8. Key parameters for the establishment of multiple regression models
项目 R2 /% 德宾·沃森值 回归模型显著性 滑跑距离 93.1 1.722 < 10-4 偏出距离 61.0 1.148 < 10-4
下载: 导出CSV
表 9 多元回归模型的共线性诊断结果
Table 9. Collinear diagnostic results of multiple regression models
项目 VIF 水膜厚度 1.81 摩阻不平衡度 1.81 侧风风速 1.0 着陆接地时刻地速 1.1 着陆重量 1.0 反推力 5.3 反推不平衡度 4.2 驾驶员反应速度 2.1
下载: 导出CSV
表 10 多元回归模型标准化系数
Table 10. Normalization coefficients for multiple regression models
影响因素 滑跑距离 偏出距离 标准化系数B1 显著性 标准化系数B2 显著性 (常量) < 0.001 < 0.001 水膜厚度 0.497 < 0.001 0.534 < 0.001 摩阻不平衡度 0.258 < 0.001 0.409 < 0.001 侧风风速 0.081 < 0.001 0.251 < 0.001 着陆接地时刻地速 0.913 < 0.001 0.663 < 0.001 着陆重量 0.033 < 0.001 0.027 0.018 反推力 -0.016 0.035 0.005 0.008 反推不平衡度 -0.004 0.070 0.013 0.005 驾驶员反应速度 0.002 0.008 -0.085 < 0.001
下载: 导出CSV
表 11 飞机滑跑方向回归模型参数表
Table 11. Regression model of aircraft taxiing
影响因素 非标准化系数 显著性 OR值 水膜厚度 -0.311 < 0.001 0.732 摩阻不平衡度 3.384 < 0.001 29.478 侧风风速 -0.281 < 0.001 0.755 着陆接地时刻地速 -0.054 < 0.001 0.948 着陆重量 0.051 < 0.001 1.000 反推力 -3.774 < 0.001 0.023 反推不平衡度 0.717 < 0.001 2.048 驾驶员反应速度 -2.183 < 0.001 0.113
下载: 导出CSV
表 12 飞机着陆滑跑距离与偏出距离非标准化系数
Table 12. Non-normalization coefficient of landing run distance and deflection distance
影响因素 滑跑距离非标准化系数 偏出距离非标准化系数 (常量) -0.837 -7.271 水膜厚度 x1 0.008 0.166 摩阻不平衡度 x2 0.015 0.453 侧风风速 x3 0.001 0.059 着陆接地时刻地速 x4 0.008 0.111 着陆重量 x5 5.44 × 10-7 8.60 × 10-6 反推力 x6 -4.31 × 10-6 0.002 反推不平衡度 x7 -9.41 × 10-5 0.007 驾驶员反应速度 x8 0.021 -0.115
下载: 导出CSV
表 13 指标对比
Table 13. Comparison of indicators
项目 R2 MAE/m MAPE/% 滑跑距离模型 0.88 48.32 7.75 偏出距离模型 0.61 7.54 33.23
下载: 导出CSV
表 14 冲偏出跑道事件参数表
Table 14. Parameters of runway deflection events
项目 LY-NVL飞机冲偏出跑道事件 P4-KBB飞机冲偏出跑道事件 水膜厚度/mm 3 10 摩阻不平衡度 1 1 侧风风速/(m/s) 5.6 25.2 着陆接地时刻地速/(m/s) 80.3 70.0 飞机重量/t 57 55 反推力 5(最大档位) 5(最大档位) 反推不平衡度 1 1 驾驶员反应速度 0(正常) 0(正常) 滑跑距离实际值/m 790.0 650.0 滑跑距离预测值/m 759.1 676.4 滑跑距离偏差率/% 4.0 4.1 偏出距离实际值/m 45.0 52.5 偏出距离预测值/m 15.6 38.2 偏出距离偏差率/% 65.3 27.2
下载: 导出CSV
-
[1] 王逸凡, 孙有朝, 刘勋, 等. 起飞阶段民机驾驶舱人机系统风险分析方法研究[J]. 交通信息与安全, 2024, 42(4): 42-52. doi: 10.3963/j.jssn.1674-4861.2024.04.005WANG Y F, SUN Y Z, LIU X, et al. A risk analysis of human-machine system of civil aircraft in take-off stage[J]. Journal of Transport Information and Safety, 2024, 42(4): 42-52. (in Chinese) doi: 10.3963/j.jssn.1674-4861.2024.04.005 [2] 刘芳兵. 湿滑跑道飞机侧风着陆滑行安全研究[D]. 天津: 中国民航大学, 2020.LIU F B. Research on crosswind landing taxiing safety of wet runway aircraft[D]. Tianjin: Civil Aviation University of China, 2020. (in Chinese) [3] 齐心歌, 毕晟, 张楠, 等. 冲偏出跑道事件风险影响指标分析[J]. 航空工程进展, 2024, 15(1): 61-68.QI X G, BI S, ZHANG N, et al. Analysis of risk impact indicators for runway excursion events[J]. Progress in Aeronautical Engineering, 2024, 15(1): 61-68. (in Chinese) [4] 赵赶超, 雷晶晶, 刘志强, 等. 基于Apriori算法的飞机冲偏出跑道诱因挖掘[J]. 计算机仿真, 2024, 41(2): 44-50.ZHAO G C, LEI J J, LIU Z Q, et al. Mining of inducements for aircraft deflecting off runway based on apriori algorithm[J]. Computer Simulation, 2024, 41(2): 44-50. (in Chinese) [5] 占欣. 基于QAR数据的冲/偏出跑道风险评估研究[D]. 天津: 中国民航大学, 2019.ZHAN X. Risk assessment study on runway excursion based on qar data[D]. Tianjin: Civil Aviation University of China, 2019. (in Chinese) [6] 温瑞英, 吴博, 褚双磊, 等. 民用飞机着陆距离预测研究[J]. 中国安全科学学报, 2017, 27(1): 77-81.WEN R Y, WU B, CHU S L, et al. Research on prediction of landing distance of civil aircraft[J]. China Safety Science Journal, 2017, 27(1): 77-81. (in Chinese) [7] BARRY D J. Estimating runway veer-off risk using a Bayesian network with flight data[J]. Transportation Research Part C: Emerging Technologies, 2021, 128: 103180. doi: 10.1016/j.trc.2021.103180 [8] 王洁宁, 张钰涵, 张聪俊. 基于STPA冲偏出跑道不安全控制行为分析[J]. 中国民航大学学报, 2019, 37(6): 46-50.WANG J N, ZHANG Y H, ZHANG C J. Analysis of unsafe control behavior of runway excursion based on stpa[J]. Journal of Civil Aviation University of China, 2019, 37(6): 46-50. (in Chinese) [9] GALAGEDERA S D B, ADIKARIWATTAGE V, PASINDU H R. Evaluation of rapid exit locations based on veer-off risk for landing aircraft[J]. Sustainability, 2021, 13(9): 5134. doi: 10.3390/su13095134 [10] 汪磊, 安佳宁, 赵新斌, 等. 基于QAR数据的飞行员个体超限风险精细化评价模型[J]. 中国安全科学学报, 2024, 34 (8): 35-42.WANG L, AN J N, ZHAO X B, et al. Refined evaluation model of individual pilot overrun risk based on qar data[J]. China Safety Science Journal, 2024, 34(8): 35-42. (in Chinese) [11] 王文超, 何健, 宋佰胜, 等. 基于LSTM的航线飞行员操纵平稳性预测模型[J]. 中国安全科学学报, 2024, 34(12): 48-55.WANG W C, HE J, SONG B S, et al. Prediction model of airline pilot maneuvering stationarity based on lstm[J]. China Safety Science Journal, 2024, 34(12): 48-55. (in Chinese) [12] 蔡靖, 牛玉发, 王岩, 等. 侧风湿滑条件飞机着陆滑跑姿态人机闭环动力学仿真分析[J]. 北京航空航天大学学报, 2025, 51(11): 3674-3687.CAI J, NIU Y F, WANG Y, et al. Simulation analysis of human-machine closed-loop dynamics of aircraft landing and taxiing attitude under crosswind and wet runway conditions[J]. Journal of Beijing University of Aeronautics and Astronautics, 2025, 51(11): 3674-3687. (in Chinese) [13] 靳慧斌, 张静, 吕川. HRV在管制员疲劳检测中的适用性[J]. 北京航空航天大学学报, 2018, 44(11): 2292-2298.JIN H B, ZHANG J, LYU C. Applicability of hrv in controller fatigue detection[J]. Journal of Beijing University of Aeronautics and Astronautics, 2018, 44(11): 2292-2298. (in Chinese) [14] DU X, GE D, DANG Z, et al. Rapid aerodynamic estimation of annular wings based on multiple linear regression[J]. Aerospace Science and Technology, 2025, 158: 109887. doi: 10.1016/j.ast.2024.109887 [15] HOSSEINI S M, RADMEHR A, HOSSEINIAN AHANGARNEJAD A, et al. A statistical evaluation of multiple regression models for contact dynamics in rail vehicles using roller rig data[J]. International Journal of Rail Transportation, 2022, 10(6): 717-729. doi: 10.1080/23248378.2021.2021829 [16] 刘重阳, 齐东东, 冯大强, 等. 加力燃烧室试验燃气分析取样探针设计与验证[J]. 推进技术, 2023, 44(5): 138-148.LIU C Y, QI D D, FENG D Q, et al. Design and verification of gas analysis sampling probe for afterburner test[J]. Propulsion Technology, 2023, 44(5): 138-148. (in Chinese) [17] YU Y, LIU X, WANG E, et al. Dam safety evaluation based on multiple linear regression and numerical simulation[J]. Rock Mechanics and Rock Engineering, 2018, 51: 2451-2467. doi: 10.1007/s00603-018-1435-z [18] 郭野晨风, 李杰, 胡明华, 等. 基于简化WITI指标的机场延误预测方法[J]. 交通运输系统工程与信息, 2017, 17(5): 207-213.GUO Y C F, LI J, HU M H, et al. Airport delay prediction method based on simplified witi index[J]. Transportation Systems Engineering and Information, 2017, 17(5): 207-213. (in Chinese) [19] 张帅, 王宇, 钟伯文, 等. 面向客机总体设计的涡扇发动机分析模型[J]. 南京航空航天大学学报, 2016, 48(3): 382-388.ZHANG S, WANG Y, ZHONG B W, et al. Journal of Nanjing University of Aeronautics and Astronautics, 2016, 48 (3): 382-388. (in Chinese) [20] 黄敬杰, 张鑫, 孟超, 等. 反推力装置对民航飞机减速性能影响[J]. 航空动力学报, 2023, 38(3): 728-734.HUANG J J, ZHANG X, MENG C, et al. Effect of thrust reverser on deceleration performance of civil aircraft[J]. Journal of Aerospace Power, 2023, 38(3): 728-734. (in Chinese) [21] 李颜平, 吴刚. 基于典型数据集的数据预处理方法对比分析[J]. 沈阳工业大学学报, 2022, 44(02): 185-192.LI Y P, WU G. Comparative analysis of data preprocessing methods based on typical datasets[J]. Journal of Shenyang University of Technology, 2022, 44(2): 185-192. (in Chinese) [22] KVAM P H, VIDAKOVIC B. Nonparametric statistics with applications to science and engineering[M]. Hoboken: John Wiley & Sons, 2007. [23] 董亚冰, 李瑞敏, 张萌佳, 等. 基于多元线性回归的匝道路段行车风险预测[J]. 公路, 2024, 69(9): 219-229.DONG Y B, LI R M, ZHANG M J, et al. Traffic risk prediction on ramp sections based on multiple linear regression[J]. Highway, 2024, 69(9): 219-229. (in Chinese) [24] 韩勇, 卢明, 王丙雨, 等. 车—电动两轮车典型碰撞场景下汽车驾驶员反应差异[J]. 汽车安全与节能学报, 2023, 14(2): 182-190.HAN Y, LU M, WANG B Y, et al. Difference of car driver response in typical collision scenarios of vehicle-electric two-wheeled vehicle[J]. Journal of Automotive Safety and Energy Conservation, 2023, 14(2): 182-190. (in Chinese) -



 点击查看大图
点击查看大图
计量
- 文章访问数: 12
- HTML全文浏览量: 9
- PDF下载量: 3
- 被引次数: 0