摘要:
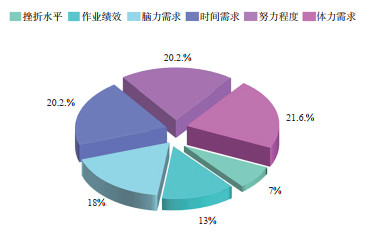
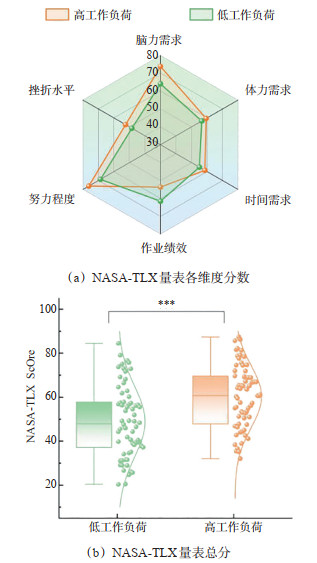
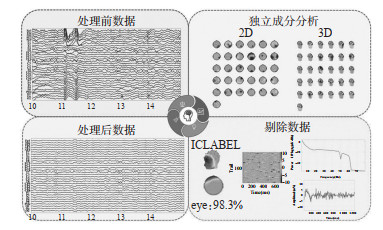
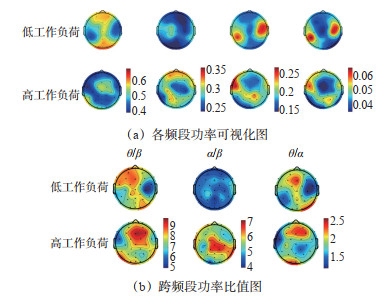
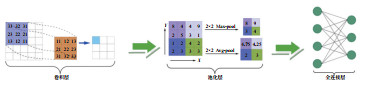
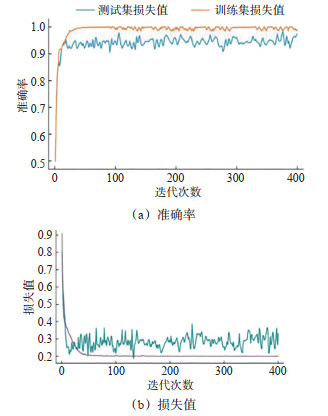
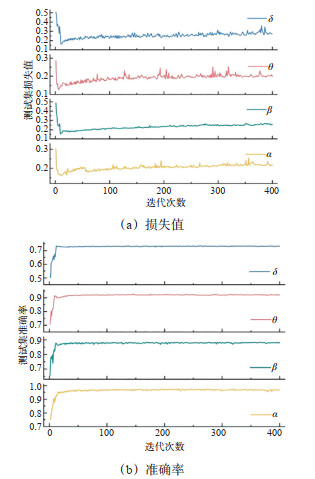
民航飞行学员的工作负荷水平直接影响飞行安全。针对基于脑电信号(electroencephalogram,EEG)的民航飞行学员工作负荷识别方法存在模型泛化能力不足、对跨频段与空间特征利用不充分等问题,研究了基于EEG特征的民航飞行学员工作负荷识别方法:①提出了主客观相结合的评估框架,通过在模拟飞行环境中采集不同任务场景下民航飞行学员的脑电信号及任务负荷评估量表(NASA task load index, NASA-TLX)数据,以此同步获取飞行学员工作负荷的客观生理测量和主观负荷数据;②针对传统研究中多孤立考察单一频段,从而忽视频段间的交互关系,采用独立样本t检验分析,筛选出具有显著差异性的脑电特征参数(P < 0.05)。进一步结合全脑功率谱密度激活图,分析不同工作负荷下θ、δ、α、β频段与跨频段功率比值的神经响应机制和空间分布特性;③利用提取后的全频段及各子频段的脑电特征进行模型训练,建立基于卷积神经网络(convolutional neural network,CNN)和长短期记忆网络(long short-term memory,LSTM)的工作负荷识别模型,以此实现对工作负荷演变的精准识别。实验发现:所选特征能够区分不同负荷下的神经调控模式,在高工作负荷时,民航飞行学员的α、θ、β频段能量上升,而δ频段能量下降。其中,θ节律通过额-顶-右颞环路实现资源优先调配,而α频段在左颞—顶—前额通路呈现抑制干扰的功能增强;本文模型在识别脑电特征时,实现了对脑电信号的空间分布模式和时域动态特征的同步捕捉。本文混合模型在测试集准确率达到94.5%,准确率优于传统单一模型CNN、LSTM、Transformer;α频段的测试集准确率达到95.5%,能够有效识别飞行员的工作负荷。