

A Recognition Method for Risky Driving Behaviors of Urban Expressway Merging Area Based on DE-EL Model
-
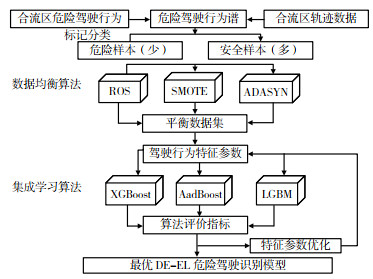
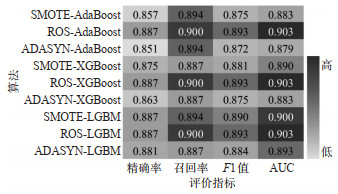
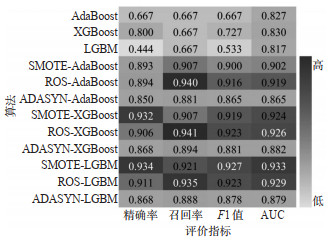
摘要: 为提高快速路合流区行车安全水平,实现合流区危险驾驶行为准确识别与交通事故预防,基于车辆轨迹数据提出了1种合流区驾驶人危险驾驶操作行为辨识方法。依托合流区交通航拍视频轨迹数据,运用风险度量法与四分位差法确定4类合流区驾驶人危险驾驶操作行为特征指标阈值。通过前期建立的合流区危险驾驶行为谱,计算驾驶人危险操作得分G,标记危险驾驶人,实现驾驶人分类。选用ROS、SMOTE、ADASYN数据均衡算法(data equalization,DE)对不平衡数据集中的危险驾驶人样本进行扩充,降低轨迹数据集的不平衡度。联合XGBoost、LGBM、AdaBoost集成学习分类算法(ensemble learning,EL)建立DE-EL模型,以车速、变速、横向操作、位置特征以及时间占比5类特征参数变量作为输入,对合流区驾驶人危险驾驶操作行为进行识别。通过Spearman相关性分析对DE-EL识别模型输入特征参数进行优化,提升合流区危险驾驶操作行为识别模型的性能,最终从模型的精确率、召回率、F1值和AUC值确定最优合流区危险驾驶行为识别模型。研究表明:合流区驾驶人行车风险水平与横向操作关联度最高,与车辆速度关联度较低;不平衡的轨迹数据集通过单一的EL算法难以有效识别危险驾驶操作行为,DE算法可显著提升分类算法的性能;特征优化工程后,DE-EL识别模型的性能得到了提升,结果表明SMOTE-LGBM模型对合流区危险驾驶行为的识别效果最好,精确率为93.4%,召回率为92.1%,F1值为0.927,AUC值为0.933,模型可用于合流区危险驾驶行为识别、预警以及干预。Abstract: A method for recognizing risky driving behaviors using vehicle trajectory data is established to improve safety and prevent traffic accident in urban expressway merging areas. The characteristic thresholds of four types of risky driving behaviors are firstly determined using a risk assessment approach and the interquartile range method. Subsequently, drivers'risk scores (G) are calculated using the established spectrum of risky driving behaviors, enabling the classification of drivers as safe or risky. To balance the datasets, the driving risk samples are augmented by data equalization (DE) algorithms (ROS, ADASYN, and SMOTE). Combining ensemble learning (EL) algorithms (XGBoost, LGBM and AdaBoost) to build various DE-EL models for risky driving behaviors recognition. The Spearman correlation coefficient is used to optimize the input feature parameters, which include five categories: vehicle speed, acceleration and deceleration, lateral operation, position characteristics and time occupation ratio. The optimal recognition model is is determined based on precision rate, recall rate, F1 -score and AUC value. The results show that the level of driver risk is most strongly correlated with driver lateral operation and less so with vehicle speed in merging areas. The unbalanced trajectory dataset makes it difficult to effectively identify risky driving behaviors by the EL algorithm, while the DE algorithm can improve the properties of the classification algorithm. After optimizing the input feature parameters, the performance of the DE-EL recognition model improves, and the SMOTE-LGBM model is the best one with precision rate of 93.4%, recall rate of 92.1%, F1 -score of 0.927, and AUC value of 0.933. This model is applicable for recognizing, warning, intervening in risky driving behaviors in merging areas.
-

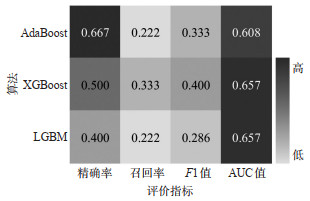
图 3 单一集成学习算法识别效果
Figure 3. Recognition performance of single ensemble learning algorithm
表 1 危险驾驶行为特征指标阈值
Table 1. Risky driving behaviors characteristic indicator thresholds
指标 阈值 TITTC/(1/s) 0.33 偏航率/((°)/s2) 9.885 Tmax{ITTC}/(1/s) 0.26 冲击度/(m/s3) 1.23  下载: 导出CSV
下载: 导出CSV
表 2 危险驾驶行为赋权
Table 2. Risky driving behaviors weighting
危险驾驶行为 wi 危险跟驰 0.173 急打方向 0.405 危险换道 0.212 急加减速 0.210
下载: 导出CSV
表 4 轨迹特征参数指标
Table 4. Trajectory characteristic parameter indicators
特征参数类别 指标 含义 车速类/(m/s) V_mean 速度的平均值、最大值和标准差 V_max V_std F∆V_mean 跟驰速度差的平均值、最大值和标准差 F∆V_max F∆V_std TF∆V_mean 目标车道前车速度差的平均值、最大值和标准差 TF∆V_max TF∆V_std TG∆V_mean 目标车道后车速度差的平均值、最大值和标准差 TG∆V_max TG∆V_std 变速类/(m/s2) A_mean 加速度的平均值、最大值和标准差 A_max A_std DA_mean 减速度的平均值、最小值和标准差 DA_min DA_std 横向操作类/(°) θ_mean 偏航角的平均值、最大值和标准差 θ_max θ_std D_mean 前车距离的平均值、最小值和标准差 D_min D_std 位置特征类/m DTF_mean 目标车道前车距离的平均值、最小值和标准差 DTF_min DTF_std DTG_mean 目标车道后车距离的平均值、最小值和标准差 DTG_min DTG_std 时间占比类/% RA 急加速时间占比(A > 2.5m/s2) RDA 急减速时间占比(DA < -2.5m/s2) RC 超速时间占比(V > 80km/h)
下载: 导出CSV
表 5 危险操作得分G与输入特征参数的Spearman系数
Table 5. Correlation coefficients between G and the characteristic parameters
序号 特征参数 Spearman相关系数 P 1 θ_std 0.774 < 0.001 2 θ_max 0.743 < 0.001 3 θ_mean 0.731 < 0.001 4 RA 0.315 < 0.001 5 A_mean 0.280 < 0.001 6 DA_mean -0.243 < 0.001 7 DA_min -0.219 < 0.001 8 A_std 0.219 < 0.001 9 DA_std 0.219 < 0.001 10 RDA 0.209 < 0.001 11 TG∆V_max 0.202 0.003 12 A_max 0.200 < 0.001
下载: 导出CSV
表 6 显著性强相关驾驶行为特征参数
Table 6. Parameters of significantly strongly correlated driving behavior characteristics
关联特征参数 Spearman相关系数 P DA_std A_std 0.983 < 0.001 θ_std θ_max 0.972 < 0.001 θ_std θ_mean 0.924 < 0.001 DA_min A_std 0.864 < 0.001 DA_min DA_std 0.864 < 0.001 θ_mean θ_max 0.854 < 0.001
下载: 导出CSV
-
[1] LI X, ZHUGE C, YU B. Analysis on the impact of ilegal driver behaviors on road traffic accidents case study on China[C]. The 11th International Conference on Intelligent Human-Machine Systems and Cybermetics, Hangzhou: IEEE, 2019. [2] 胡江碧, 何禄诚, 王荣华. 高速公路互通立交安全性评价研究综述[J]. 中国公路学报, 2020, 33(7): 17-28. doi: 10.3969/j.issn.1001-7372.2020.07.002HU J B, HE L C, WANG R H. Review of safety evaluation of freeway interchange[J]. China Journal of Highway and Transport, 2020, 33(7): 17-28. (in Chinese) doi: 10.3969/j.issn.1001-7372.2020.07.002 [3] CHEN S, XUE Q, ZHAO X, et al. Risky driving behavior recognition based on vehicle trajectory[J]. International Journal of Environmental Research and Public Health, 2021, 18(23): 12373. doi: 10.3390/ijerph182312373 [4] XIAN H, HOU Y, WANG Y, et al. Influence of risky driving behavior and road section type on urban expressway driving safety[J]. Sustainability, 2023, 15(1): 398. [5] 唐克双, 谈超鹏, 周楠. 基于轨迹数据的交叉口相位切换期间危险驾驶行为实证分析[J]. 中国公路学报, 2018, 31(4): 88-97. doi: 10.3969/j.issn.1001-7372.2018.04.011TANG K S, TAN C P, ZHOU N. Empirical analysis of risky driving behavior during the phase transition intervals at signalized intersections based on vehicle trajectory data[J]. China Journal of Highway and Transport, 2018, 31(4): 88-97. (in Chinese) doi: 10.3969/j.issn.1001-7372.2018.04.011 [6] CHEN T, SHI X, WONG Y D. Key feature selection and risk prediction for lane-changing behaviors based on vehicles'trajectory data[J]. Accident Analysis & Prevention, 2019, 129: 156-169. [7] SHI X, WONG Y D, LI M, et al. A feature learning approach based on XGBoost for driving assessment and risk prediction[J]. Accident Analysis & Prevention, 2019, 129: 170-179. [8] 薛清文, 蒋愚明, 陆键. 基于轨迹数据的危险驾驶行为识别方法[J]. 中国公路学报, 2020, 33(6): 84-94. doi: 10.3969/j.issn.1001-7372.2020.06.008XUE Q W, JIANG Y M, LU J. Risky driving behavior recognition based on trajectory data[J]. China Journal of Highway and Transport, 2020, 33(6): 84-94. (in Chinese) doi: 10.3969/j.issn.1001-7372.2020.06.008 [9] 张方方, 王长君, 王俊骅. 城市快速路匝道合流区车辆交互行为模式[J]. 中国公路学报, 2022, 35(9): 66-79. doi: 10.3969/j.issn.1001-7372.2022.09.006ZHANG F F, WANG C J, WANG J H. Vehicle interaction patterns at on-ramp merging area of urban expressway[J]. China Journal of Highway and Transport, 2022, 35(9): 66-79. (in Chinese) doi: 10.3969/j.issn.1001-7372.2022.09.006 [10] 马艳丽, 祁首铭, 吴昊天, 等. 基于PET算法的匝道合流区交通冲突识别模型[J]. 交通运输系统工程与信息, 2018, 18 (2): 142-148.MA Y L, QI S M, WU H T, et al. Traffic conflict identification model based on post encroachment time algorithm in ramp merging area[J]. Journal of Transportation Systems Engineering and Information Technology, 2018, 18(2), 142-148. (in Chinese) [11] 温惠英, 李秋灵, 赵胜. 快速路合流区大型车换道时空特征及风险研究[J]. 华南理工大学学报(自然科学版), 2022, 50(5): 11-21.WEN H Y, LI Q L, ZHAO S. Research on spatiotemporal characteristic and risk of lane-changing behaviors of large vehicles in expressway merging area[J]. Journal of South China University of Technology (Natural Science Edition), 2022, 50(5): 11-21. (in Chinese) [12] GU X, CAI Q, LEE J, et al. Proactive crash risk prediction modeling for merging assistance system at interchange merging areas[J]. Traffic Injury Prevention, 2020, 21(3): 234-240. doi: 10.1080/15389588.2020.1734581 [13] 冯汝怡, 李志斌, 吴启范, 等. 航拍视频车辆检测目标关联与时空轨迹匹配[J]. 交通信息与安全, 2021, 39(2): 61-69, 77. doi: 10.3963/j.jssn.1674-4861.2021.02.008FENG R Y, LI Z B, WU Q F, et al. Association of vehicle object detection and the time-space trajectory matching from aerial videos[J]. Journal of Transport Information and Safety, 2021, 39(2): 61-69, 77. (in Chinese) doi: 10.3963/j.jssn.1674-4861.2021.02.008 [14] 刘唐志, 毕辉云, 杨卓思, 等. 基于操纵量指标的合流区危险驾驶行为谱研究[J]. 交通运输系统工程与信息, 2023, 23(2): 242-251.LIU T Z, BI H Y, YANG Z S, et al. Research on dangerous driving behavior spectrum in merging area based on maneuver indicators[J]. Journal of Transportation Systems Engineering and Information Technology, 2023, 23(2): 242-251. (in Chinese) [15] 陆键, 王可, 蒋愚明. 基于车辆行驶轨迹的道路不良驾驶行为实时辨识方法[J]. 交通运输工程学报, 2020, 20(6): 227-235.LU J, WANG K, JIANG Y M. Real-time identification method of abnormal road driving behavior based on vehicle driving trajectory[J]. Journal of Traffic and Transportation Engineering, 2020, 20(6): 227-235. (in Chinese) [16] 王可, 陆键, 蒋愚明. 基于车辆行驶轨迹的道路不良驾驶行为谱构建与特征值计算方法[J]. 交通运输工程学报, 2020, 20(6): 236-249.WANG K, LU J, JIANG Y M. Abnormal road driving behavior spectrum establishment and characteristic value calculation method based on vehicle driving trajectory[J]. Journal of Traffic and Transportation Engineering, 2020, 20(6): 236-249. (in Chinese) [17] 万豫, 黄妙华, 王思楚. 基于改进DBSCAN算法的驾驶风格识别方法研究[J]. 合肥工业大学学报(自然科学版), 2020, 43(10): 1313-1320. doi: 10.3969/j.issn.1003-5060.2020.10.003WAN Y, HUANG M H, WANG S C. Research on a driving style recognition method based on improved DBSCAN algorithm[J]. Journal of Hefei University of Technology (Natural Science), 2020, 43(10): 1313-1320. (in Chinese) doi: 10.3969/j.issn.1003-5060.2020.10.003 [18] CHAWLA N V, BOWYER K W, HALL L O, et al. SMOTE: synthetic minority over-sampling technique[J]. Journal of Artificial Intelligence Research, 2002, 16: 321-357. doi: 10.1613/jair.953 [19] HE H, BAI Y, GARCIA E A, et al. ADASYN: Adaptive synthetic sampling approach for imbalanced learning[C]. The 2008 International Joint Conference on Neural Networks, Piscataway: IEEE, 2008. [20] 刘定祥, 乔少杰, 张永清, 等. 不平衡分类的数据采样方法综述[J]. 重庆理工大学学报(自然科学), 2019, 33(7): 102-112.LIU D X, QIAO S J, ZHANG Y Q, et al. A survey on data sampling methods in imbalance classification[J]. Journal of Chongqing University of Technology (Natural Science), 2019, 33(7): 102-112. (in Chinese) [21] 曹莹, 苗启广, 刘家辰, 等. AdaBoost算法研究进展与展望[J]. 自动化学报, 2013, 39(6): 745-758.CAO Y, MIAO Q G, LIU J Z, et al. Advance and prospects of AdaBoost algorithm[J]. Acta Automatica Sinica, 2013, 39(6): 745-758. (in Chinese) [22] CHEN T, GUESTRIN C. Xgboost: A scalable tree boosting system[C]. The 22nd ACM Sigkdd International Conference on Knowledge Discovery and Data Mining. San Francisco: ACM, 2016. [23] KE G, MENG Q, FINLEY T, et al. Lightgbm: a highly efficient gradient boosting decision tree[J]. Advances in Neural Information Processing Systems, 2017, 30(1): 3146-3154. -

 点击查看大图
点击查看大图
计量
- 文章访问数: 107
- HTML全文浏览量: 36
- PDF下载量: 29
- 被引次数: 0