

Performance Test and Evaluation of Vehicle IMU Installation Angle Calculation Considering Road Surface State
-
摘要: 轮速里程计和非完整性约束是抑制全球导航卫星系统(Global Navigation Satellite System,GNSS)信号长时间中断情形下GNSS/INS组合导航系统误差发散的2种常用方法,准确的车载惯性测量单元(inertial measurement unit,IMU)安装姿态是应用轮速里程计和非完整性约束的必要条件。传统的安装角标定方法在理想路面下表现良好,但其核心运动学约束的成立严重依赖于轮胎与地面的理想接触条件,在实际复杂行驶环境中,不同的路面状态会通过引起车辆异常运动破坏约束条件的基本假设,导致在线安装角估计算法性能下降甚至失效。为研究不同路况和行驶状态对IMU安装姿态估计算法的影响,针对路面颠簸、长时间小角度转弯和短时间大角度转弯这3种场景进行了仿真分析和车载实验。通过对比速度观测模型和位置观测模型在不同场景下的表现,分析了不同路面状态对IMU安装角的精度和鲁棒性的影响。实验结果表明:在路面颠簸场景下,位置观测模型较速度观测模型具有更高的估计精度,分别提高了76%俯仰安装角和67%航向安装角的估计精度;在长时间小角度弯道行驶场景下,速度观测模型表现更好,分别提高了32%俯仰安装角和57%航向安装角的估计精度;然而,在大角度急弯场景下,由于车辆航向快速变化产生了较大的横向速度和横向位移,破坏了约束条件,因此大角度急弯场景下需增强动力学约束和误差补偿,满足高动态下稳定精确的安装角估计结果的获取。Abstract: Wheel speed odometry and nonholonomic constraints are two commonly used methods to suppress error divergence in Global Navigation Satellite System (GNSS)/Inertial Navigation System (INS) integrated navigation systems during prolonged GNSS signal outages. Accurate in-vehicle inertial measurement unit (IMU) mounting attitude is a prerequisite for applying wheel speed odometry and nonholonomic constraints. Traditional mounting angle calibration methods perform well on ideal road surfaces, but the validity of their core kinematic constraints heavily relies on ideal tire-ground contact conditions. In actual complex driving environments, different road surface conditions can disrupt the fundamental assumptions of these constraints by inducing abnormal vehicle motions, leading to degraded performance or even failure of online mounting angle estimation algorithms. To investigate the impact of different road conditions and driving states on IMU mounting attitude estimation algorithms, this study conducts simulation analyses and in-vehicle experiments focusing on three scenarios: road bumps, prolonged small-angle turns, and short-duration large-angle turns. By comparing the performance of velocity observation models and position observation models across these scenarios, the influence of different road surface conditions on the accuracy and robustness of IMU mounting angle estimation is analyzed. Experimental results show that in road bump scenarios, the position observation model achieves higher estimation accuracy than the velocity observation model, improving pitch mounting angle estimation by 76% and heading mounting angle estimation by 67%. In prolonged small-angle curve driving scenarios, the velocity observation model performs better, enhancing pitch mounting angle estimation by 32% and heading mounting angle estimation by 57%. However, in large-angle sharp turn scenarios, rapid changes in vehicle heading generate significant lateral velocity and displacement, which violate the constraint conditions. Therefore, in such high-dynamic scenarios, enhanced dynamic constraints and error compensation are required to achieve stable and accurate mounting angle estimation.
-

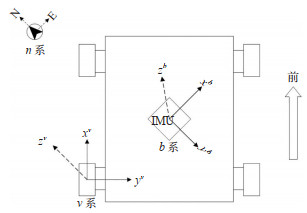
图 1 车载IMU的安装姿态示意图
Figure 1. Schematic diagram of the installation attitude of the vehicle IMU

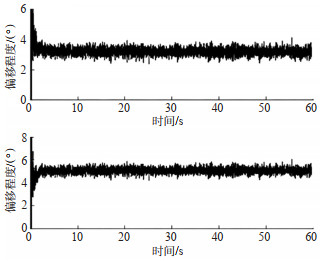
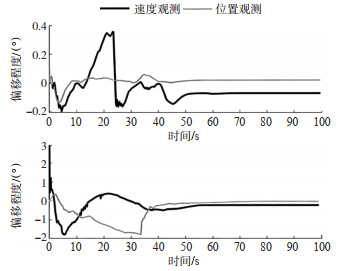
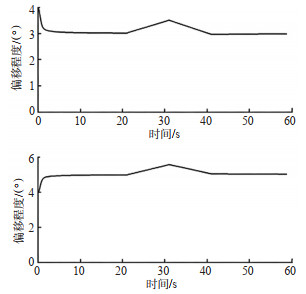
图 4 基于速度观测的安装角估计曲线图
Figure 4. Installation angle estimation curve based on velocity observation

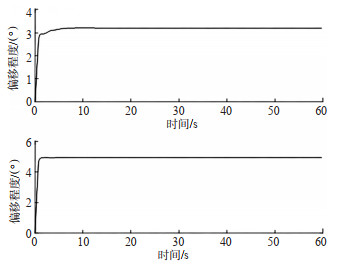
图 5 基于位置观测的安装角估计曲线图
Figure 5. Installation angle estimation curve based on position observation

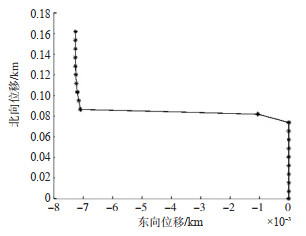
图 7 2种观测模型的安装角估计曲线
Figure 7. The installation angle estimation curves of two observation models

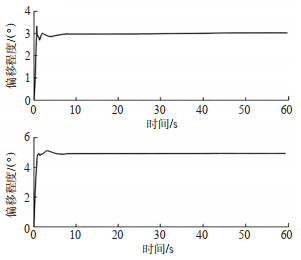
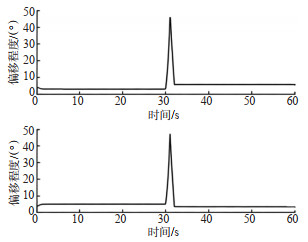
图 9 基于速度观测的安装角估计曲线图
Figure 9. Installation angle estimation curve based on velocity observation

图 10 基于位置观测的安装角估计曲线图
Figure 10. Installation angle estimation curve based on position observation

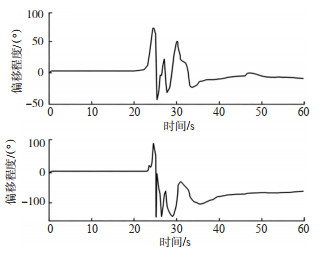
图 12 基于速度观测的安装角估计曲线图
Figure 12. Installation angle estimation curve based on velocity observation

图 13 基于位置观测的安装角估计曲线图
Figure 13. Installation angle estimation curve based on position observation

图 15 2种观测模型的安装角估计曲线图
Figure 15. The installation angle estimation curves of two observation models
表 1 SCHA634设备参数
Table 1. The equipment parameters of SCHA634
传感器 参数 数值 加速度计 零偏不稳定性/μg 15 速度随机游走/(m/s)/$\sqrt{h} $ 0.035 陀螺仪 零偏不稳定性/(°/h) 0.9 角度随机游走/(°/$ \sqrt{s}$) 0.09  下载: 导出CSV
下载: 导出CSV
表 2 路面颠簸场景下RMSE统计值
Table 2. The statistics of RMSE under bumpy road scene
观测量 俯仰角/(°) 航向角/(°) 速度 0.221 3 0.060 8 位置 0.207 9 0.054 2
下载: 导出CSV
表 3 2种观测模型的RMSE统计值
Table 3. The RMSE statistics of the two observation models
观测量 俯仰角/(°) 航向角/(°) 速度 0.074 2 0.240 0 位置 0.017 4 0.078 3
下载: 导出CSV
表 4 小角度弯道行驶场景下RMSE统计值
Table 4. The statistics of RMSE under small-angle curve driving scene
观测量 俯仰角/(°) 航向角/(°) 速度 0.021 4 0.049 8 位置 0.205 4 0.292 0
下载: 导出CSV
表 5 大角度弯道行驶场景下RMSE统计值
Table 5. The statistics of RMSE under large-angle curve driving scene
观测量 俯仰角/(°) 航向角/(°) 速度 观测量 23.612 421.915 6 位置 26.485 949.161 9
下载: 导出CSV
表 6 2种观测模型的RMSE统计值
Table 6. The RMSE statistics of the two observation models
观测量 俯仰角/(°) 航向角/(°) 速度 0.109 1 0.037 4 位置 0.159 7 0.087 2
下载: 导出CSV
-
[1] HE Y, LI J C, LIU J J. Research on GNSS INS & GNSS/INS integrated navigation method for autonomous vehicles: a survey[J]. IEEE Access, 2023(11): 79033-79055. [2] 魏文辉, 赵祥模, 葛振振. 考虑动力学模型系统误差补偿的智能车GNSS/IMU组合定位算[J]. 中国公路学报, 2022, 35 (9): 185-194.WEI W H, ZHAO X M, GE Z Z. Intelligent vehicle GNSS/IMU combined positioning algorithm considering dynamic model system error compensation[J]. Chinese Journal of Highways, 2022, 35(9): 185-194. (in Chinese) [3] CHEN L, ZHENG F, GONG X P, et al. GNSS high-precision augmentation for autonomous vehicles: requirements, solution, and technical challenges[J]. Remote Sensing, 2023, 15 (6): 1-20. [4] 王章宇, 周洪武, 余贵珍, 等. 基于逐级优化策略的特征退化场景下自动驾驶车辆自主定位方[J]. 中国公路学报, 2024, 37(7): 303-316.WANG Z Y, ZHOU H W, YU G Z, et al. Autonomous localization of autonomous driving vehicles in feature degradation scenarios based on hierarchical optimization strategy[J]. Chinese Journal of Highways, 2024, 37(7): 303-316. (in Chinese) [5] LORRAINE K J S, RAMARAKULA M. A comprehensive survey on GNSS interferences and the application of neural networks for anti-jamming[J]. IETE Journal of Research, 2021, 69(7): 4286-4305. [6] CHEN G, WANG J, HU H. An integrated GNSS/INS/DR positioning strategy considering nonholonomic constraints for intelligent vehicle[C]. The 6th CAA International Conference on Vehicular Control and Intelligence (CVCI2022), Nanjing, China: IEEE, 2020. [7] LI X X, QIN Z Y, SHEN Z H, et al. A high-precision vehicle navigation system based on tightly coupled PPP-RTK/INS/odometer integration[J]. IEEE Transactions on Intelligent Transportation Systems, 2022, 24(2): 1855-1866. [8] ZHAO L, QUAN H. Using regularized softmax regression in the GNSS/INS integrated navigation system with nonholonomic constraints[C]. IOP Conference Series: Materials Science and Engineering, Wuhan, China: IOP Publishing, 2019. [9] NIU X, WU Y, KUANG J. Wheel-INS: a wheel-mounted MEMS IMU-based dead reckoning system[J]. IEEE Transactions on Vehicular Technology, 2021, 70(10): 9814-9825. doi: 10.1109/TVT.2021.3108008 [10] WU Y B, KUANG J, NIU X J. Wheel-INS2: multiple MEMS IMU-based dead reckoning system with different configurations for wheeled robots[J]. IEEE Transactions on Intelligent Transportation Systems, 2023, 24(3): 3064-3077. doi: 10.1109/TITS.2022.3220508 [11] 陈芊芊, 胡凤玲, 文元桥. 基于九轴IMU的船舶运动模式识别方法[J]. 交通信息与安全, 2024, 42(6): 74-83. doi: 10.3963/j.jssn.1674-4861.2024.06.008CHEN Q Q, HU F L, WEN Y Q. Ship motion pattern recognition method based on nine axis IMU[J]. Journal of Transport Information and Safety, 2024, 42(6): 74-83. (in Chinese) doi: 10.3963/j.jssn.1674-4861.2024.06.008 [12] ZHANG Q, HU Y, LI S, et al. Mounting parameter estimation from velocity vector observations for land vehicle navigation[J]. IEEE Transactions on Industrial Electronics, 2021, 69(4): 4234-4244. . [13] LI B F, CHEN G E. Precise cooperative positioning for vehicles with GNSS and INS integration[J]. Acta Geodaetica et Cartographica Sinica, 2022, 51(8): 1708. [14] WANG D, DONG Y, LI Z, et al. Constrained MEMS-based GNSS/INS tightly coupled system with robust Kalman filter for accurate land vehicular navigation[J]. IEEE Transactions on Instrumentation and Measurement, 2019, 69 (7): 5138-5148. [15] CHEN C, CHANG G. Low-cost GNSS/INS integration for enhanced land vehicle performance[J]. Measurement Science and Technology, 2019, 31(3): 035009. [16] VINANDE E, AXELRAD P, AKOS D. Mounting-angle estimation for personal navigation devices[J]. IEEE Transactions on Vehicular Technology, 2009, 59(3): 1129-1138. [17] MU M, ZHAO L. A GNSS/INS-integrated system for an arbitrarily mounted land vehicle navigation device[J]. GPS Solutions, 2019, 23(4): 1-13. [18] 冯木榉, 高迪, 何文涛. 面向低成本车载IMU的安装姿态估计[J]. 测绘通报, 2020(6): 67-70.FENG M J, GAO D, HE W T. Installation attitude estimation for low-cost vehicle IMU[J]. Surveying and Mapping Bulletin, 2020(6): 67-70. (in Chinese) [19] LI L, SUN H, YANG S, et al. Online calibration and compensation of total odometer error in an integrated system[J]. Measurement, 2018, 123: 69-79. doi: 10.1016/j.measurement.2018.03.044 [20] LIU Z, EL-SHEIMY N, QIN Y. Low-cost INS/odometer integration and sensor-to-sensor calibration for land vehicle applications[C]. The IAG/CPGPS International Conference on GNSS+(ICG+ 2016), Shanghai, China: Springer, 2016. [21] CHEN Q, ZHANG Q, NIU X. Estimate the pitch and heading mounting angles of the IMU for land vehicular GNSS/INS integrated system[J]. IEEE Transactions on Intelligent Transportation Systems, 2020, 22(10): 6503-6515. [22] WEN Z, YANG G, CAI Q, et al. Odometer aided SINS in-motion alignment method based on backtracking scheme for large misalignment angles[J]. IEEE Access, 2019(8): 7937-7948. -

 点击查看大图
点击查看大图
计量
- 文章访问数: 6
- HTML全文浏览量: 1
- PDF下载量: 2
- 被引次数: 0