

A Method of Parking Path Planning for Underground Autonomous Mining Trucks Based on Wd-RRT* Algorithm
-
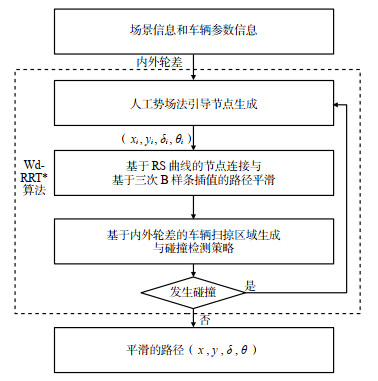
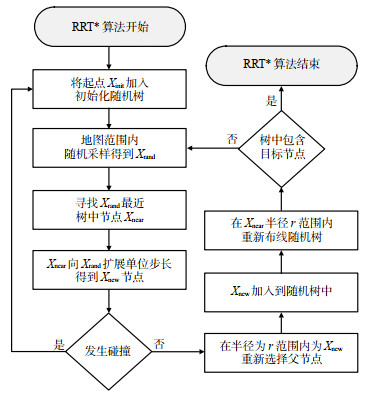
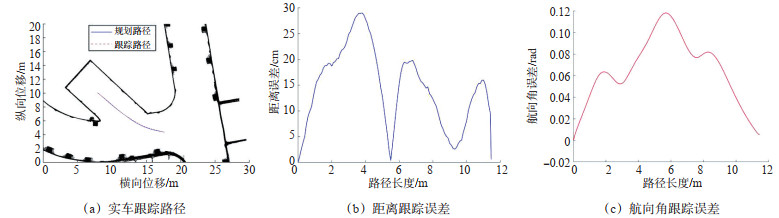
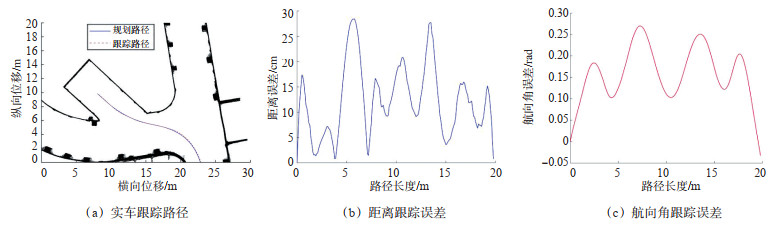
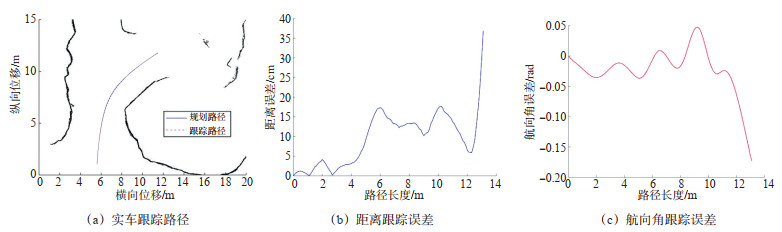
摘要: 自动驾驶矿车为井下矿区的安全生产、高效运输提供了有效解决方案,井下矿车在上料区的低速行驶过程可以当作泊车行为,由于井下矿区具有空间狭束和多坡急弯等特征,地面场景的泊车路径规划方法在井下矿区应用时存在实时性不足与碰撞检测精度不高等问题。因此,在传统路径规划算法RRT*算法的基础上研究了适用于井下矿区场景的Wd-RRT*算法。基于Wd-RRT*算法构建了包含结合人工势场的节点生成、引入Reeds-Shepp(RS)曲线的路径生成与平滑、车辆行进扫掠区域生成与碰撞检测3个过程的井下自动泊车路径规划框架。为了更适应井下矿区场景,与传统的矩形框碰撞检测策略不同,将内外轮差与规划出的路径结合生成车辆行进扫掠区域,并基于车辆行进扫掠区域进行车辆碰撞检测,以保证安全和提升效率。研究分别开展了数值仿真试验、1∶1模拟巷道实车试验和井下实际巷道实车试验,共收集180条试验数据。仿真试验结果表明:Wd-RRT*算法相较于Informed-RRT*算法,平均规划时长减少了28.67%,平均路径长度缩短了5.76%,平均节点个数减少了3.95%,能够更好地满足井下泊车路径规划的实时性需求。实车试验结果表明:矿车距离跟踪误差不超过40 cm,航向角跟踪误差不超过0.2 rad,距离障碍物最小距离为65.32 cm。Wd-RRT*算法规划出的路径曲率平滑且可跟踪性良好,同时满足井下泊车安全性要求。Abstract: Autonomous mining trucks provide an effective solution for safe production and efficient transportation in underground mining areas. The low-speed maneuvering process of underground mining trucks in loading zones can be regarded as parking behavior. Due to the characteristics of underground mining areas, such as confined spaces, steep slopes, and sharp turns, traditional ground-based parking path planning methods suffer from insufficient real-time performance and low collision detection accuracy when applied in underground environments. Therefore, based on the traditional RRT* algorithm, the Wd-RRT* algorithm suitable for underground mining scenarios is developed. Using the Wd-RRT* algorithm, an automatic underground parking path planning framework is constructed, which includes three processes: node generation integrated with an artificial potential field, path generation and smoothing incorporating Reeds-Shepp (RS) curves, and swept area generation along with collision detection. To better adapt to the underground mining environment, unlike traditional rectangular bounding box collision detection strategies, this paper combines the wheelbase difference with the planned path to generate the vehicle's swept area during movement, and performs collision detection based on this swept area to ensure safety and improve efficiency. The study conducted numerical simulation experiments, 1∶1 simulated tunnel field tests, and actual underground tunnel field tests, collecting a total of 180 experimental datasets. Simulation results show that compared to the Informed-RRT* algorithm, the Wd-RRT* algorithm reduces the average planning time by 28.67%, shortens the average path length by 5.76%, and decreases the average number of nodes by 3.95%, thereby better meeting the real-time requirements of underground parking path planning. Field test results indicate that the mining truck's lateral tracking error does not exceed 40 cm, the heading angle tracking error remains within 0.2 rad, and the minimum distance to obstacles is 65.32 cm. The paths planned by the Wd-RRT* algorithm exhibit smooth curvature and good trackability while satisfying the safety requirements for underground parking.
-
Key words:
- intelligent traffic /
- underground mining area /
- automatic parking /
- path planning /
- Wd-RRT* algorithm
-

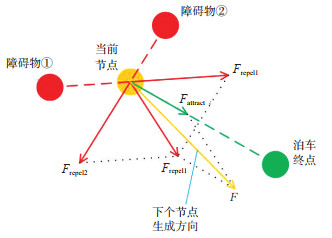
图 4 人工势场法引导节点生成示意图
Figure 4. Schematic diagram of node generation guided by the artificial potential field method

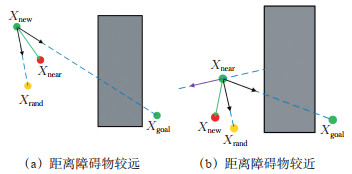
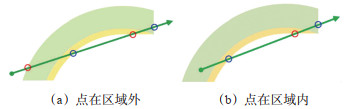
图 6 矩形框碰撞检测示意图
Figure 6. Schematic diagram of rectangular bounding box collision detection

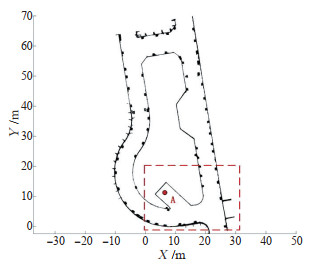
图 11 井下矿区泊车场景示意图
Figure 11. Schematic diagram of the parking scene in an underground mine
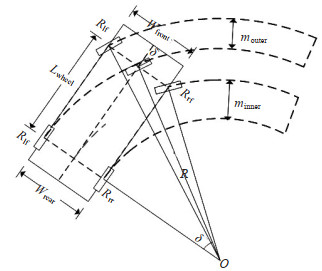
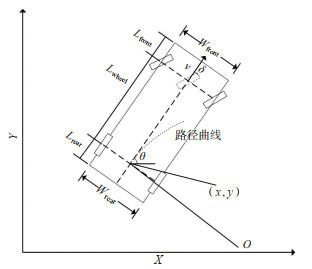
表 1 矿车主要参数
Table 1. Main parameters of the mining truck
参数 数值 车长L/m 6.6 车宽W/m 2.5 轴距长度Lwheel/m 3.4 前悬长度Lfront/m 1.45 前轮距Wfront/m 1.96 后轮距Wrear/m 1.88 最大转向角δmax/rad 0.597  下载: 导出CSV
下载: 导出CSV
表 2 泊车仿真数据
Table 2. Parking simulation data
算法 平均规划时间/ms 平均路径长度/m 平均采样点个数 平均节点个数 Wd-RRT* 46.59 15.72 7 586 14.6 Informed-RRT* 65.32 16.68 9 412 15.2 RRT* 89.57 17.52 7 963 16.4
下载: 导出CSV
表 3 模拟试验数据
Table 3. Parking simulation data
平均泊车时长/s 平均路径长度/m dmin/cm dmax/cm 12.26 16.53 75.42 186.37
下载: 导出CSV
表 4 模拟试验数据
Table 4. Parking simulation data
平均泊车时长/s 平均路径长度/m dmin/cm dmax/cm 10.57 13.72 65.32 132.69
下载: 导出CSV
-
[1] 李凯, 孙佳, 陈非, 等基于智能网联车的高速公路移动瓶颈实时检测方法[J]. 交通信息与安全, 2024, 42(5): 24-32. doi: 10.3963/j.jssn.1674-4861.2024.05.003LI K, SUN J, CHEN F, et al. A real-time detection method for moving bottlenecks on highways based on connected and automated vehicles[J]. Journal of Transport Information and Safety, 2024, 42(5): 24-32. (in Chinese) doi: 10.3963/j.jssn.1674-4861.2024.05.003 [2] 朱冰, 贾士政, 赵健, 等. 自动驾驶车辆决策与规划研究综述[J]. 中国公路学报, 2024, 37(1): 215-240.ZHU B, JIA S Z, ZHAO J, et al. Review of research on decision-making and planning for automated vehicles[J]. China Journal of Highway and Transport, 2024, 37(1): 215-240. (in Chinese) [3] LI B, YIN Z Y, OUYANG Y K, et al. Online trajectory replanning for sudden environmental changes during automated parking: a parallel stitching method[J]. IEEE Transactions on Intelligent Vehicles, 2022, 7(3): 748-757. doi: 10.1109/TIV.2022.3156429 [4] KIM D J, JEONG Y W, CHUNG C C. Lateral vehicle trajectory planning using a model predictive control scheme for an automated perpendicular parking system[J]. IEEE Transactions on Industrial Electronics, 2022, 70(2): 1820-1829. [5] CHAI R Q, TSOURDOS A, SAVVARIS A L, et al. Multiobjective optimal parking maneuver planning of autonomous wheeled vehicles[J]. IEEE Transactions on Industrial Electronics, 2020, 67(12): 10809-10821. doi: 10.1109/TIE.2019.2962482 [6] DIJKSTRA E W. A note on two problems in connexion with graphs[J]. Numerische Mathematik, 1959(1): 269-271. [7] 任秉韬, 王淅淅, 邓伟文等. 基于混合A*和可变半径RS曲线的自动泊车路径优化方法[J]. 中国公路学报, 2022, 35 (7): 317-327.REN B T, WANG X X, DENG W W, et al. Path optimization algorithm for automatic parking based on hybrid A* and Reeds-Shepp curve with variable radius[J]. China Journal of Highway and Transport, 2022, 35(7): 317-327. (in Chinese) [8] MITTAL K, SONG J N, GUPTA S, et al. Rapid path planning for Dubins vehicles under environmental currents[J]. Robotics and Autonomous Systems, 2020, 134: 103646. doi: 10.1016/j.robot.2020.103646 [9] HAN X, ZHANG X, ZHANG H. Trajectory planning of usv: on-line computation of the double s trajectory based on multi-scale A* algorithm with Reeds-Shepp curves[J]. Journal of Marine Science and Engineering, 2023, 11(1): 153. doi: 10.3390/jmse11010153 [10] LI B, SHAO Z J. Precise trajectory optimization for articulated wheeled vehicles in cluttered environments[J]. Advances in Engineering Software, 2016, 92: 40-47. doi: 10.1016/j.advengsoft.2015.10.008 [11] HÜPPI M, BARTOLOMEI L, MASCARO R, et al. T-prm: temporal probabilistic roadmap for path planning in dynamic environments[C]. 2022 IEEE/RSJ International Conference on Intelligent Robots and Systems, Kyoto, Japan: IEEE, 2022. [12] CHEN R A, HU J, XU W C. An RRT-Dijkstra-based path planning strategy for autonomous vehicles[J]. Applied Sciences, 2022, 12(23): 11982. doi: 10.3390/app122311982 [13] PATEL D, ESKANDARIAN A. Probabilistic RRT connect with intermediate goal selection for online planning of autonomous vehicles[J]. IFAC-PapersOnLine, 2023, 56(3): 373-378. doi: 10.1016/j.ifacol.2023.12.052 [14] KARAMAN S, FRAZZOLI E. Sampling-based algorithms for optimal motion planning[C]. IEEE International Conference on Robotics and Automation, Karlsruhe, Germany: IEEE, 2013. [15] POPP C, ZIEGLER C, SIPPEL M, et al. Ideal reference point in planning and control for automated car-like vehicles[J]. IEEE Transactions on Intelligent Vehicles, 2022, 8 (2): 1415-1424. [16] 李伟龙. 基于改进RRT*的自动泊车路径规划方法研究[D]. 西安: 长安大学, 2022.LI W L. Research on automatic parking path planning method based on improved RRT*[D]. Xi'an: Chang'an University, 2022. (in Chinese) -



 点击查看大图
点击查看大图
计量
- 文章访问数: 14
- HTML全文浏览量: 4
- PDF下载量: 2
- 被引次数: 0