

A Stability Analysis of Mixed Traffic Flow in Connected Environment
-
摘要: 针对智能网联车辆和人工驾驶车辆组成的混合交通流,分别采用最优速度模型、1种自适应巡航控制跟驰模型,以及1种协同自适应巡航控制跟驰模型对人工驾驶车辆、退化的智能网联车辆和智能网联车辆进行建模,以探究智能网联车辆对混合交通流稳定性的影响。基于车辆跟驰模型,重点考虑人工驾驶车辆是否具备网联能力的影响,应用传递函数无穷范数理论对混合交通流的稳定性开展数值对比分析。此外,分析中还重点关注协同自适应巡航控制中前车加速度项控制系数对混合交通流稳定性的参数敏感性,并且使用频域分析方法对该参数进行系统性分析。然后基于仿真开展了不同智能网联车辆市场渗透率下的混合交通流微观仿真实验。研究结果表明:在人工驾驶车辆具备网联能力的混合交通流中,通过增强协同自适应巡航控制模型对前车加速度信息的利用,可显著提升交通流整体稳定性。当该加速度项控制系数由0增加至1时,任意车速条件下混合交通流稳定所需的智能网联车辆渗透率临界值由62%降低至33%。相比之下,在人工驾驶车辆不具备网联能力的情况下,该临界值仅由62%降低至54%,稳定性提升幅度明显受限,表明人工驾驶车辆的网联能力是放大协同控制稳定性收益的关键因素。Abstract: This study investigates how intelligent connected vehicles (ICVs) affect the stability of mixed traffic flow consisting of ICVs and human-driven vehicles (HDVs). In mixed traffic, HDVs, degraded ICVs, and ICVs are modeled using an optimal velocity model, an adaptive cruise control (ACC) model, and a cooperative adaptive cruise control (CACC) model, respectively. Based on these car-following models, traffic stability is numerically compared using transfer-function infinity norm, with explicit consideration of whether HDVs have connectivity. In addition, the predecessor-acceleration gain in the CACC model is further examined through a systematic frequency-domain sensitivity analysis. Subsequently, microscopic traffic simulations are conducted under different ICV market penetration rates. Results show that, when HDVs have connectivity, a larger predecessor-acceleration gain in CACC model significantly improves overall stability. When the predecessor-acceleration gain increases from 0 to 1, the critical ICV penetration rate for stability decreases from 62% to 33% at any speed. In contrast, when HDVs lack connectivity, the critical penetration rate only decreases from 62% to 54%, indicating a limited stability improvement. These findings demonstrate that connectivity of HDVs is a key factor that amplifies the stability benefits of cooperative control in mixed traffic flow.
-

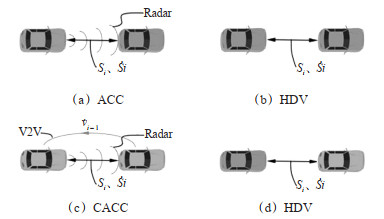
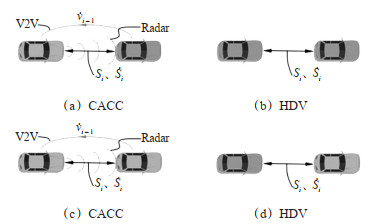
图 1 HDV具备网联能力情况下的跟驰类别
Figure 1. Types of car-following models in the case of HDVs with connected capabilities

图 2 HDV具备网联能力情况下混合交通流稳定域图
Figure 2. The stability region diagram of mixed traffic flow when HDVs with connected capabilities

图 3 HDV不具备网联能力情况下的跟驰类别
Figure 3. Types of car-following models in the case of HDVs without connected capabilities

图 4 HDV不具备网联能力情况下混合交通流稳定域
Figure 4. The stable region diagram of mixed traffic flow when HDVs without connected capabilities

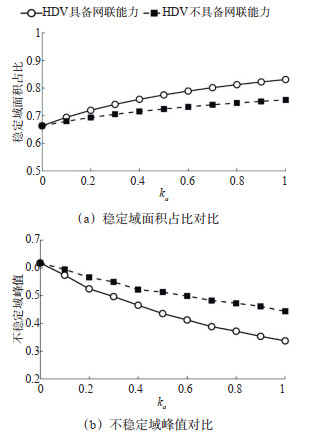
图 5 不同ka下稳定域面积占比、不稳定域峰值对比
Figure 5. Comparison of area percentages of stable domains and peak values of unstable domains under different ka

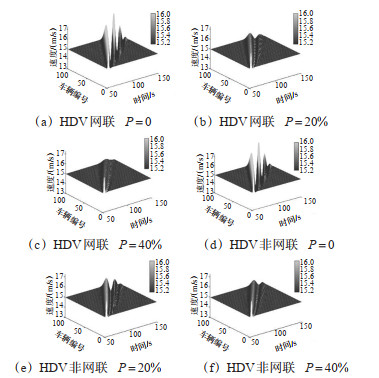
图 8 2种情况不同ICV渗透率下RSD值和RMAD值
Figure 8. RSD and RMAD values for 2 cases under different ICV penetration rates
表 1 OVM车辆跟驰模型参数
Table 1. Parameters of the OVM car-following model
参数 取值 $\alpha /(1 / \mathrm{s})$ 0.6 $\beta /(1 / \mathrm{s})$ 0.9 $s_{\text {min }} / \mathrm{m}$ 2 $s_{\text {max }} / \mathrm{m}$ 32 $v_{\text {max }} /(\mathrm{m} / \mathrm{s})$ 30  下载: 导出CSV
下载: 导出CSV
表 2 ACC/CACC车辆跟驰模型参数
Table 2. Parameters of the ACC/CACC car-following model
参数 取值 $\Delta t / \mathrm{s}$ 0.1 $t_{h} / \mathrm{s}$ 1.0 $s_{0} / \mathrm{m}$ 2 $k_{p} /(1 / \mathrm{s})$ 0.45 $k_{d}$ 0.25 $k_{a}$ 0.5
下载: 导出CSV
-
[1] 李克强, 戴一凡, 李升波, 等. 智能网联汽车(ICV)技术的发展现状及趋势[J]. 汽车安全与节能学报, 2017, 8(1): 1-14.LI K Q, DAI Y F, LI S B, et al. State-of-the-art and technical trends of intelligent and connected vehicles[J]. Journal of Automotive Safety and Energy, 2017, 8(1): 1-14. (in Chinese) [2] GUERRERO-IBANEZ J A, ZEADALLY S, CONTRERAS-CASTILLO J. Integration challenges of intelligent transportation systems with connected vehicle, cloud computing, and internet of things technologies[J]. IEEE Wireless Communications, 2015, 22(6): 122-128. doi: 10.1109/MWC.2015.7368833 [3] LI S E, ZHENG Y, LI K, et al. Dynamical modeling and distributed control of connected and automated vehicles: challenges and opportunities[J]. IEEE Intelligent Transportation Systems Magazine, 2017, 9(3): 46-58. doi: 10.1109/MITS.2017.2709781 [4] 徐志刚, 李金龙, 赵祥模, 等. 智能公路发展现状与关键技术[J]. 中国公路学报, 2019, 32(8): 1-24.XU Z G, LI J L, ZHAO X M, et al. A review on intelligent road and its related key technologies[J]. China Journal of Highway and Transport, 2019, 32(8): 1-24. (in Chinese) [5] WANG J, PEETA S, HE X. Multiclass traffic assignment model for mixed traffic flow of human-driven vehicles and connected and autonomous vehicles[J]. Transportation Research Part B: Methodological, 2019, 126: 139-168. doi: 10.1016/j.trb.2019.05.022Mater||86||284|2018||| [6] ZHENG Y, WANG J, LI K. Smoothing traffic flow via control of autonomous vehicles[J]. IEEE Internet of Things Journal, 2020, 7(5): 3882-3896. doi: 10.1109/JIOT.2020.2966506 [7] TALEBPOUR A, MAHMASSANI H S. Influence of connected and autonomous vehicles on traffic flow stability and throughput[J]. Transportation Research Part C: Emerging Technologies, 2016, 71: 143-163. doi: 10.1016/j.trc.2016.07.007 [8] WANG J, ZHENG Y, CHEN C, et al. Leading cruise control in mixed traffic flow: system modeling, controllability, and string stability[J]. IEEE Transactions on Intelligent Transportation Systems, 2021, 23(8): 12861-12876. [9] CUI S, XUE Y, GAO K, et al. Adaptive collision-free trajectory tracking control for string stable bidirectional platoons[J]. IEEE Transactions on Intelligent Transportation Systems, 2023, 24(11), 12141-12153. doi: 10.1109/TITS.2023.3286587 [10] NAUS G J L, VUGTS R P A, PLOEG J, et al. String-stable CACC design and experimental validation: a frequency-domain approach[J]. IEEE Transactions on Vehicular Technology, 2010, 59(9): 4268-4279. doi: 10.1109/TVT.2010.2076320 [11] TREIBER M, KESTING A. Traffic flow dynamics: data, models and simulation[M]. Berlin: Springer, 2013. [12] FENG S, ZHANG Y, LI S E, et al. String stability for vehicular platoon control: definitions and analysis methods[J]. Annual Reviews in Control, 2019, 47: 81-97. doi: 10.1016/j.arcontrol.2019.03.001 [13] NAKAYSMA A, SUGIYAMA Y, HASEBE K. Effect of looking at the car that follows in an optimal velocity model of traffic flow[J]. Physical Review E, 2001, 65(1): 016112. doi: 10.1103/PhysRevE.65.016112 [14] KESTING A, TREIBER M, HELBING D. Enhanced intelligent driver model to access the impact of driving strategies on traffic capacity[J]. Philosophical Transactions of the Royal Society A: Mathematical, Physical and Engineering Sciences, 2010, 368(1928): 4585-4605. doi: 10.1098/rsta.2010.0084 [15] DAVIS L C. Effect of adaptive cruise control systems on traffic flow[J]. Physical Review E, 2004, 69(6): 066110. doi: 10.1103/PhysRevE.69.066110 [16] KESTING A, TREIBER M, SCHÖNHOF M, et al. Adaptive cruise control design for active congestion avoidance[J]. Transportation Research Part C: Emerging Technologies, 2008, 16(6): 668-683. doi: 10.1016/j.trc.2007.12.004 [17] MARSDEN G, MCDONALD M, BRACKSTONE M. Towards an understanding of adaptive cruise control[J]. Transportation Research Part C: Emerging Technologies, 2001, 9 (1): 33-51. doi: 10.1016/S0968-090X(00)00022-X [18] XIAO L, WANG M, SCHAKEL W, et al. Unravelling effects of cooperative adaptive cruise control deactivation on traffic flow characteristics at merging bottlenecks[J]. Transportation Research Part C: Emerging Technologies, 2018, 96: 380-397. doi: 10.1016/j.trc.2018.10.008 [19] WANG M, DAAMEN W, HOOGENDOORN S P, et al. Cooperative car-following control: distributed algorithm and impact on moving jam features[J]. IEEE Transactions on Intelligent Transportation Systems, 2015, 17(5): 1459-1471. [20] 张璐, 张兆磊, 刘至真, 等. 考虑智能网联汽车通信延时的混合交通流稳定性分析[J]. 交通信息与安全, 2024, 42(2): 95-104. doi: 10.3963/j.jssn.1674-4861.2024.02.010ZHANG L, ZHANG Z L, LIU Z Z, et al. A stability analysis of mixed traffic flows considering communication delay of connected and autonomous vehicles[J]. Journal of Transport Information and Safety, 2024, 42(2): 95-104. (in Chinese) doi: 10.3963/j.jssn.1674-4861.2024.02.010 [21] CHANG X, LI H, RONG J, et al. Analysis on traffic stability and capacity for mixed traffic flow with platoons of intelligent connected vehicles[J]. Physica A: Statistical Mechanics and its Applications, 2020, 557: 124829. doi: 10.1016/j.physa.2020.124829 [22] YAO Z, XU T, JIANG Y, et al. Linear stability analysis of heterogeneous traffic flow considering degradations of connected automated vehicles and reaction time[J]. Physica A: Statistical Mechanics and its Applications, 2021, 561: 125218. doi: 10.1016/j.physa.2020.125218 [23] WANG H, QIN Y, WANG W, et al. Stability of CACC-manual heterogeneous vehicular flow with partial CACC performance degrading[J]. Transportmetrica B: Transport Dynamics, 2019, 7(1): 788-813. doi: 10.1080/21680566.2018.1517058 [24] QIN Y, WANG H. Stabilizing mixed cooperative adaptive cruise control traffic flow to balance capacity using car-following model[J]. Journal of Intelligent Transportation Systems, 2023, 27(1): 57-79. doi: 10.1080/15472450.2021.1985490 [25] GE J I, OROSZ G. Dynamics of connected vehicle systems with delayed acceleration feedback[J]. Transportation Research Part C: Emerging Technologies, 2014, 46: 46-64. doi: 10.1016/j.trc.2014.04.014 [26] GE J I, OROSZ G. Optimal control of connected vehicle systems with communication delay and driver reaction time[J]. IEEE Transactions on Intelligent Transportation Systems, 2016, 18(8): 2056-2070. [27] MILANÉS V, SHLADOVER S E. Modeling cooperative and autonomous adaptive cruise control dynamic responses using experimental data[J]. Transportation Research Part C: Emerging Technologies, 2014, 48: 285-300. doi: 10.1016/j.trc.2014.09.001 [28] GIAMMARINO V, BALDI S, FRASCA P, et al. Traffic flow on a ring with a single autonomous vehicle: an interconnected stability perspective[J]. IEEE Transactions on Intelligent Transportation Systems, 2020, 22(8): 4998-5008. [29] ZHOU Y, AHN S, WANG M, et al. Stabilizing mixed vehicular platoons with connected automated vehicles: an Hinfinity approach[J]. Transportation Research Part B: Methodological, 2020, 132: 152-170. doi: 10.1016/j.trb.2019.06.005 [30] LIU D, BESSELINK B, BALDI S, et al. On structural and safety properties of head-to-tail string stability in mixed platoons[J]. IEEE Transactions on Intelligent Transportation Systems, 2022, 24(6): 6614-6626. [31] WANG Y, ZHANG R, MASOUD N, et al. Anomaly detection and string stability analysis in connected automated vehicular platoons[J]. Transportation Research Part C: Emerging Technologies, 2023, 151: 104114. doi: 10.1016/j.trc.2023.104114 [32] WILSON R E, WARD J A. Car-following models: fifty years of linear stability analysis-a mathematical perspective[J]. Transportation Planning and Technology, 2011, 34(1): 3-18. doi: 10.1080/03081060.2011.530826 [33] WANG J, ZHENG Y, XU Q, et al. Controllability analysis and optimal control of mixed traffic flow with human-driven and autonomous vehicles[J]. IEEE Transactions on Intelligent Transportation Systems, 2020, 22(12): 7445-7459. [34] KAMRANI M, ARVIN R, KHATTAK A J. Extracting useful information from basic safety message data: an empirical study of driving volatility measures and crash frequency at intersections[J]. Transportation Research Record, 2018, 2672 (38): 290-301. doi: 10.1177/0361198118773869 -




 点击查看大图
点击查看大图
计量
- 文章访问数: 9
- HTML全文浏览量: 6
- PDF下载量: 1
- 被引次数: 0