

A Multi-UAV Path Planning Algorithm Based on DMPC-A* Fusion
-
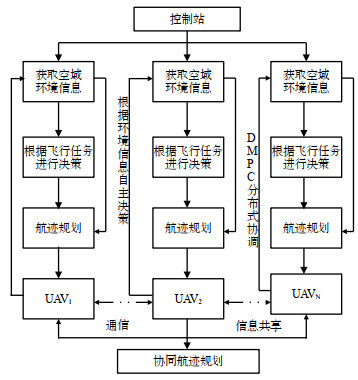
摘要: 针对复杂三维空域环境中多无人机协同目标跟踪和动态避障的路径规划所面临的效率低、飞行稳定性差的问题,研究了基于分布式模型预测控制(distributed model predictive control,DMPC)与A*搜索算法融合的路径优化方法。利用A*算法生成多无人机的全局初始路径,为各无人机分配合理的目标航迹点,并为无人机提供基本可行的安全航迹。将贝塞尔曲线与DMPC预测模型融合,通过对曲线控制点参数优化实现路径平滑性和航迹连续性的提升,并综合考虑无人机动力学约束、航迹长度约束、安全距离约束及通信条件约束,构建多目标代价函数并采用滚动优化求解,实现航迹的实时动态调整。为平衡航程、威胁、能耗和控制输入等多个代价,重新标定代价权重系数,保证群体飞行的安全性和全局最优性。同时,针对传统集中式模型预测控制(model predictive control,MPC)计算量大、实时性差的问题,采用分布式求解策略,使得每架无人机独立优化控制输入,并通过信息交互实现协同目标跟踪,从而显著降低算法的计算复杂度。实验仿真环境采用5.2 m× 5.2 m×3.0m三维空间,部署10架无人机及不同形状的静态障碍物,通过多个Python程序仿真实验来验证方法的有效性。结果表明:与传统算法相比,本文提出的DMPC-A*融合方法可将路径长度缩短约4.2%,此外,航迹平滑度和稳定性也有所提升。本文算法具备良好的障碍规避能力和环境适应性,为多无人机协同路径规划的研究提供技术支撑。Abstract: Aiming at the problems of low efficiency and poor flight stability faced by path planning for multi-UAV cooperative target tracking and dynamic obstacle avoidance in complex three-dimensional airspace environments, A path optimization method based on the integration of distributed model predictive control (DMPC) and A* search algorithm was studied. The A* algorithm is utilized to generate the global initial paths of multiple unmanned aerial vehicles (UAVs), assign reasonable target trajectory points to each UAV, and provide basically feasible safe trajectories for the UAVs. The Bezier curve is integrated with the DMPC prediction model. By optimizing the parameters of the curve control points, the smoothness of the path and the continuity of the track are improved. Considering the dynamic constraints of the unmanned aerial vehicle, the track length constraints, the safety distance constraints and the communication condition constraints comprehensively, a multi-objective cost function is constructed and solved by rolling optimization to achieve real-time dynamic adjustment of the track. To balance multiple costs such as flight range, threat, energy consumption and control input, the cost weight coefficients are recalibrated to ensure the safety and global optimality of group flight. Meanwhile, in view of the problems of large computational load and poor real-time performance of the traditional centralized model predictive control (MPC), a distributed solution strategy is adopted, enabling each unmanned aerial vehicle to independently optimize the control input and achieve collaborative target tracking through information interaction, thereby significantly reducing the computational complexity of the algorithm. The experimental simulation environment adopts a three-dimensional space of 5.2 m×5.2 m×3.0 m, deploys 10 unmanned aerial vehicles and static obstacles with different shapes, and verifies the effectiveness of the method through multiple Python program simulation experiments. The results show that: Compared with the traditional algorithm, the DMPC-A* fusion method proposed in this paper can shorten the path length by approximately 4.2%. Besides, the track smoothness and stability are also improved. The algorithm proposed in this paper has good obstacle avoidance ability and environmental adaptability, providing technical support for the research on collaborative path planning for multiple unmanned aerial vehicles.
-

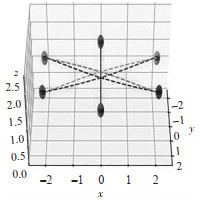
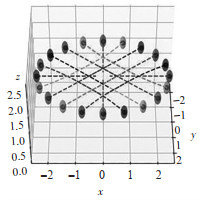
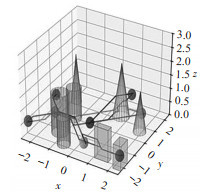
图 11 有障碍物时A*搜索算法的路径图初始状态
Figure 11. Initial state of the path map for the A* search algorithm when obstacles are present

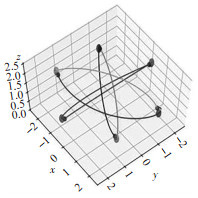
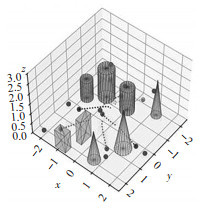
图 12 有障碍物时A*搜索算法的路径图最终位置
Figure 12. Final position on the path map of the A* search algorithm when obstacles are present

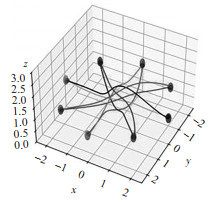
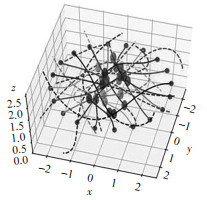
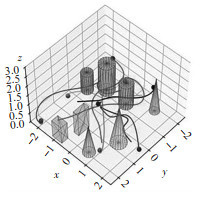
图 13 有障碍物时DMPC的路径图初始状态
Figure 13. Initial state of the DMPC path map when obstacles are present

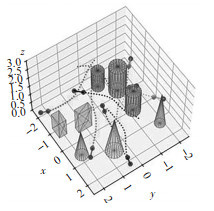
图 14 有障碍物时DMPC的路径图最终位置
Figure 14. Final positions of the DMPC path map when obstacles are present

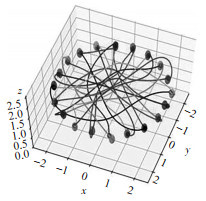
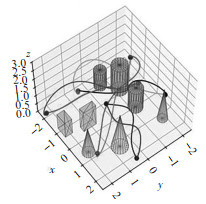
图 15 有障碍物时DMPC-A*融合算法的初始状态
Figure 15. Initial state of the DMPC-A* fusion algorithm in the presence of obstacles

图 16 有障碍物时DMPC-A*融合算法的最终位置
Figure 16. Final position of the DMPC-A* fusion algorithm in the presence of obstacles
表 1 系统初始化数值
Table 1. System initialization values
参数 数值 航迹长度约束/m 5 飞行高度/m 1.2 安全距离/m 1.2 最大速度/(m/s) 1.5 四旋翼重量/kg 5 半径/cm 2.4 无人机速度/(m/s) 1.5 最大偏航角/(°) 60  下载: 导出CSV
下载: 导出CSV
表 2 6架无人机初始位置和目标位置
Table 2. Initial and target positions of 6 UAVs
无人机编号 初始位置(x,y,z) 目标位置(x,y,z) 无人机1 1.83, 1.22, 0.5 -2.44, -3.05, 0.5 无人机2 0.61, 2.44, 0.5 0, -0.61, 0.5 无人机3 -2.44, 0.61, 0.5 0.61, -3.05, 0.5 无人机4 -1.83, -0.61, 0.5 2.44, -1.83, 0.5 无人机5 0.61, -3.05, 0.5 -2.44, 0.61, 0.5 无人机6 2.44, -1.83, 0.5 -1.83, -0.61, 0.5
下载: 导出CSV
表 3 8架无人机初始位置和目标位置
Table 3. Initial and target positions of 8 UAVs
无人机编号 初始位置(x, y, z) 目标位置(x, y, z) 无人机1 1.83, 1.22, 0.5 -2.44, -3.05, 0.5 无人机2 0.61, 2.44, 0.5 0, -0.61, 0.5 无人机3 -2.44, 0.61, 0.5 0.61, -3.05, 0.5 无人机4 -1.83, -0.61, 0.5 2.44, -1.83, 0.5 无人机5 -2.44, -3.05, 0.5 1.83, 1.22, 0.5 无人机6 0, -0.61, 0.5 0.61, 2.44, 0.5 无人机7 0.61, -3.05, 0.5 -2.44, 0.61, 0.5 无人机8 2.44, -1.83, 0.5 -1.83, -0.61, 0.5
下载: 导出CSV
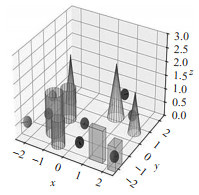
表 4 障碍物位置
Table 4. Obstacle Location
障碍物编号 初始位置(x,y,z,r) 圆锥障碍物1 1.90,0.61,1.5,0.3 圆锥障碍物2 0.61,1.22,2.0,0.4 圆锥障碍物3 -1.83,1.22,1.8,0.25 圆柱障碍物1 -1.22,0,1.2,0.35 圆柱障碍物2 -1.22,-1.22,1.5,0.4 圆柱障碍物3 -0.61,-1.90,1.0,0.3
下载: 导出CSV
表 5 长方体障碍物位置
Table 5. Rectangular obstacle location
障碍物编号 初始位置(x,y,z) 障碍物1 1.83,-1.90,1.2 障碍物2 1.90,-1.22,0.9
下载: 导出CSV
表 6 无人机初始位置和目标位置
Table 6. Initial and target positions of UAVs
无人机编号 初始位置(x,y,z) 目标位置(x,y,z) 无人机1 1.83,1.22,0.5 -2.44,-1.95,0.5 无人机2 0.61,2.44,0.5 0,-0.61,0.5 无人机3 -2.44,0.61,0.5 0.61,-1.95,0.5 无人机4 -1.83,-0.61,0.5 2.44,-1.83,0.5 无人机5 -2.44,-1.95,0.5 1.83,1.22,0.5 无人机6 0,-0.61,0.5 0.61,2.44,0.5 无人机7 0.61,-1.95,0.5 -2.44,0.61,0.5 无人机8 2.44,-1.83,0.5 -1.83,-0.61,0.5
下载: 导出CSV
表 7 算法性能对比
Table 7. Algorithm Performance Comparison
算法 平均路径长度/m 计算时间/s 避障成功率/% 能量消耗/J A*算法 8.76 0.42 92.5 156.3 DMPC算法 8.43 1.23 96.2 142.8 DMPC-A*算法 8.19 0.58 98.5 138.5
下载: 导出CSV
-
[1] 张健, 赵嶷飞, 卢飞, 等. 城市物流无人机平行航线横向间隔研究[J]. 交通信息与安全, 2024, 42(4): 118-124. doi: 10.3963/j.jssn.1674-4861.2024.04.013ZHANG J, ZHAO Y F, LU F, et al. A study on parallel routes lateral separation for urban logistics[J]. Journal of Transport Information and Safety, 2024, 42(4): 118-124. (in Chinese) doi: 10.3963/j.jssn.1674-4861.2024.04.013 [2] 李晓辉, 苗苗, 冉保健, 等. 基于改进A*算法的无人机避障路径规划[J]. 计算机系统应用, 2021, 30(2): 255-259.LI X H, MIAO M, RAN B J, et al. Obstacle avoidance path planning for uav based on improved A* algorithm[J]. Computer Systems Applications, 2021, 30(2): 255-259. (in Chinese) [3] LI X, HU X, WANG Z, et al. Path planning based on combinaion of improved A-STAR algorithm and DWA algorithm[C]. The 2nd International Conference on Artificial Intelligence and Advanced Manufacture(AIAM). IEEE, 2020. [4] 高九州, 徐威峰, 张立辉, 等. 基于改进A*算法的无人机避障航线规划[J]. 现代电子技术, 2023, 46(8): 181-186.GAO J Z, XU W F, ZHANG L H, et al. Obstacle avoidance route planning of uav based on optimized A* algorithm[J]. Modern Electronic Technology, 2023, 46(8): 181-186. (in Chinese) [5] 唐嘉宁, 彭志祥, 李孟霜, 等. 基于改进A*算法的无人机路径规划研究[J]. 电子测量技术, 2023, 46(8): 99-104.TANG J N, PENG Z X, LI M S, et al. Research on uav path planning based on improved A* algorithm[J]. Electronic Measurement Technology, 2023, 46(8): 99-104. (in Chinese) [6] 刘艳, 李文波, 刘新彪, 等. 复杂环境下无人机三维航迹规划及避障算法[J]. 电光与控制, 2023, 30(5): 93-98, 110.LIU Y, LI W B, LIU X B, et al. A 3d trajectory planning and obstacle avoidance algorithm for uav in complex environment[J]. Electronic Optics & Control, 2023, 30 (5) : 93-98, 110. (in Chinese) [7] 陈绍绵, 赵均, 钱积新. 多时标分散预测控制算法[J]. 自动化学报, 2007, (9): 993-996.CHEN S M, ZHAO J, QIAN J X. Multi-timescale decentralized predictive control algorithm[J]. Acta Automatica Sinica, 2007, (9): 993-996. (in Chinese) [8] 王晓海, 孟秀云, 李传旭. 基于MPC的无人机航迹跟踪控制器设计[J]. 系统工程与电子技术, 2021, 43(1): 191-198.WANG X H, MENG X Y, LI C X. Design of trajectory tracking controller for uav based on MPC[J]. Systems Engineering and Electronics, 2021, 43(1): 191-198. (in Chinese) [9] 罗统, 张民, 梁承宇. 复杂环境下多无人机协同目标跟踪路径规划[J]. 兵工自动化, 2024, 43(9): 90-96.LUO T, ZHANG M, LIANG C Y. Path planning for multiple uavs cooperative target tracking in complex environment[J]. Ordnance Industry Automation, 2024, 43(9): 90-96. (in Chinese) [10] 顾海艳, 陈亮, 王多点. 基于模型预测控制的无人机时空协同航迹规划[J]. 计算机工程与应用, 2021, 57(23): 270-279.GU H Y, CHEN L, WANG D D. Space-time cooperative path planning for multi-uav using model predictive control[J]. Computer Engineering and Applications, 2021, 57 (23): 270-279. (in Chinese) [11] 李继广, 董彦非, 刘天栋, 等. 基于MPC方法无人机避障路径规划研究[J]. 火力与指挥控制, 2023, 48(3): 78-83, 89.LI J G, DONG Y F, LIU T D, et al. Obstacle avoidance route planning of uavs based on mpc method[J]. Fire Control & Command Control, 2023, 48(3): 78-83, 79. (in Chinese) [12] KOO S, KIM S, SUK J, et al. Improvement of shipboard landing performance of fixed-wing uav using model predictive control[J]. International Journal of Control, Automation and Systems, 2018, 16(6): 2697-2708. doi: 10.1007/s12555-017-0690-1 [13] SCATTOLINI R. Architectures for distributed and hierarchical model predictive control-a review[J]. Journal of process control, 2009, 19(5): 723-731. doi: 10.1016/j.jprocont.2009.02.003 [14] NEGENBORN R R, MAESTRE J M. Distributed model predictive control: an overview and roadmap of future research opportunities[J]. IEEE Control Systems Magazine, 2014, 34 (4): 87-97. doi: 10.1109/MCS.2014.2320397 [15] 李波, 屈原, 郝巧梅, 等. 基于DMPC-PSO动态威胁下的多UAV在线航迹规划[J]. 内蒙古大学学报(自然科学版), 2023, 54(5): 509-518.LI B, QU Y, HAO Q M, et al. Multiple unmanned aerial vehicles in-line route planning under dynamic threat based on DMPC-PSO[J]. Journal of Inner Mongolia University(Natural Science Edition), 2023, 54(5): 509-518. (in Chinese) [16] 何云风, 史贤俊, 卢建华, 等. 基于同步DMPC的无人机编队跟踪与避障控制[J]. 控制与决策, 2024, 39(11): 3557-3566.HE Y F, SHI X J, LU J H, et al. UAV formation tracking and obstacle avoidance control based on synchronous DMPC. Control and Decision, 2024, 39(11): 3557-3566. (in Chinese) [17] 王子恒, 李伊陶, 熊兴中. 基于分布式模型预测控制的实时可交互无人机群编队方法[J]. 计算机应用研究, 2024, 41 (12): 3600-3606.WANG Z H, LI Y T, XIONG X Z. Real-time interactive unmanned aerial vehicle swarm formation method based on distributed model predictive control[J]. Application Research of Computer, 2024, 41(12): 3600-3606. (in Chinese) [18] 王孟阳, 张栋, 唐硕, 等. 复杂动态环境下多无人机目标跟踪的分布式协同轨迹规划方法[J]. 指挥与控制学报, 2024, 10 (2): 197-212.WANG M Y, ZHANG D, TANG S, et al. A distributed cooperative trajectory planning method for multi-uav target Tracking in Complex Dynamic Environments. JOURNAL of COMMANDAND CONTROL, 2024, 10(2): 197-212. (in Chinese) [19] DAI L, CAO Q, XIA Y, et al. Distributed MPC for formation of multi-agent systems with collision avoidance and obstacle avoidance[J]. Journal of the Franklin Institute, 2017, 354(4): 2068-2085. doi: 10.1016/j.jfranklin.2016.12.021 [20] GUO Y, ZHOU J, LIU Y. Distributed Lyapunov-based model predictive control for collision avoidance of multi-agent formation[J]. IET Control Theory & Applications, 2018, 12 (18): 2569-2577. -



 点击查看大图
点击查看大图
计量
- 文章访问数: 5
- HTML全文浏览量: 2
- PDF下载量: 1
- 被引次数: 0