

An Ecological Assessment Method for Lane-Changing Overtaking Behavior Based on FL-XGBoost
-
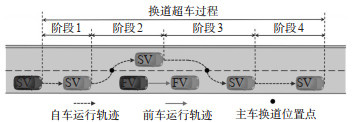
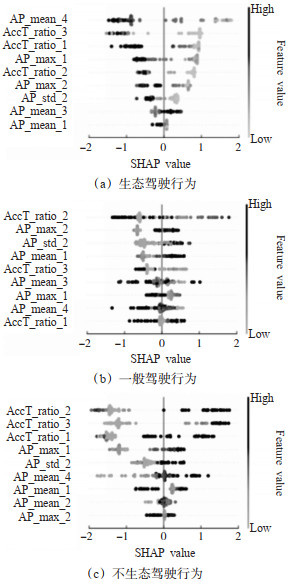
摘要: 换道超车作为1个连续且复杂的过程,对能耗有着显著影响。传统生态驾驶研究多聚焦于不区分时段的共性因素(如整体急加速频率),却忽略了驾驶过程中不同时段驾驶行为对能耗的差异化影响。研究了基于焦点损失函数(focal loss,FL)改进的极限梯度提升树(extreme gradient boosting,XGBoost)模型(FL-XGBoost模型),考虑时段异质性,分析不同时段驾驶行为对能耗的差异化影响。结合换道超车过程的动态特征,将换道超车过程划分为4个阶段,并在此基础上划分各阶段驾驶行为数据集。为实现特征空间的降维与关键信息提取,采用随机森林(random forest,RF)与蚁群优化(ant colony optimization,ACO)相融合的混合特征选择策略。此外,针对数据集中类别不均衡导致的模型识别偏倚问题,引入焦点损失函数作为优化目标,替代传统交叉熵损失,从而提升模型的识别鲁棒性与泛化性。结果表明,FL-XGBoost模型性能优于其他基线模型,如支持向量机(support vector machine,SVM)。与未改进的基准XGBoost模型相比,FL-XGBoost的准确率提升3%,F1分数提升5.1%。为进一步揭示影响因素与能耗间的因果关系,采用SHAP解释框架(shapley additive explanations,SHAP)对模型开展可解释性分析。结果表明:2次横向换道阶段的加速时长占比对换道超车全过程的生态性影响最为显著,且换道超车多阶段驾驶操作的生态性特征存在非线性耦合效应。Abstract: Lane-changing overtaking is a continuous and complex process that has a significant impact on energy consumption. Traditional eco-driving research primarily focuses on common factors, such as overall acceleration frequency, while overlooking the heterogeneous effects on driving behaviors across different periods of driving process. This study develops an improved extreme gradient boosting model based on the local loss function (FL-XGBoost model) to account for temporal heterogeneity and analyze the stage-dependent impacts of driving behaviors on energy consumption. Considering the dynamic characteristics of lane-changing overtaking, the entire process is divided into four phases, and corresponding stage-specific driving behavior datasets are constructed. To achieve dimensionality reduction and extract key information from the feature space, a hybrid feature selection strategy integrating random forest (RF) and ant colony optimization (ACO) is adopted. Furthermore, aiming at the model bias caused by class imbalance in the dataset, the focal loss function is introduced as the optimization objective in place of the traditional cross-entropy loss, thereby enhancing the robustness and generalization performance of the model. Results show that the proposed FL-XGBoost model outperforms other baseline models such as support vector machine (SVM). Compared with the unmodified XGBoost model, the FL-XGBoost model achieves improvement of 3% in accuracy and 5.1% in the F1-score. To further reveal the causal relationships between influencing factors and energy consumption, SHAP (Shapley Additive Explanations) is adopted for model interpretability analysis. The results indicate that the proportion of acceleration duration during the two lateral lane-changing phases exerts the most significant impact on the eco-driving performance of the entire lane-changing overtaking process. Nonlinear coupling effects exist among eco-driving features across multiple phases of the process.
-
Key words:
- road traffic /
- eco-driving /
- lane-changing overtaking /
- extreme gradient boosting
-

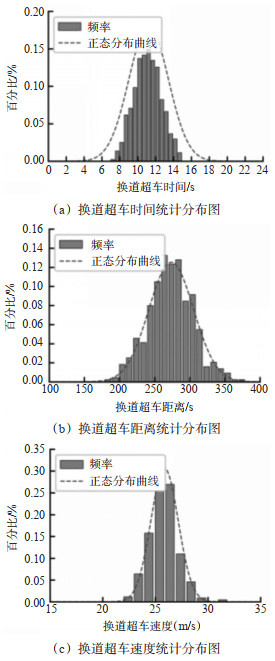
图 5 换道超车行为数据统计分析
Figure 5. Statistical analysis of lane-changing and overtaking behavior data

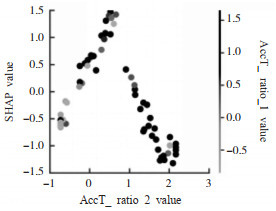
图 11 AccT_ratio_1与AccT_ratio_2的交互效应图
Figure 11. Interaction effect plot of AccT_ratio_1 and AccT_ratio_2

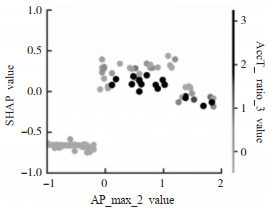
图 12 AP_max_2与AccT_ratio_3的交互效应图
Figure 12. Interaction effect plot of AP_max_2 and AccT_ratio_3
表 1 变量详细描述
Table 1. Detailed description of variables
序号 变量 采样率/Hz 数据精度 1 加速踏板深度/% 30 0.1 2 减速踏板深度/% 30 0.1 3 转向盘转角(/°) 30 0.1 4 角速度(/rad/s) 30 0.01 5 角加速度(rad/s2) 30 0.01 6 车道偏移/m 30 0.1 7 加速度(/m/s2) 30 0.1 8 速度(/m/s) 30 0.1 9 倾斜角(/°) 20 0.1 10 航向角(/°) 20 0.1 11 俯仰角(/°) 20 0.1 12 x位置(/m) 10 0.1 13 y位置(/m) 10 0.1 14 档位 10 -  下载: 导出CSV
下载: 导出CSV
表 2 换道超车驾驶行为与油耗等级对应表
Table 2. Lane changing overtaking driving behavior and fuel consumption levels
油耗类别 驾驶行为类型 聚类中心/(L/100 km) 频数 低油耗 生态驾驶行为 8.26 270 中等油耗 一般驾驶行为 10.22 82 高油耗 不生态驾驶行为 11.86 86
下载: 导出CSV
表 3 初始特征变量
Table 3. Initial feature variables
类别 特征名称 阶段 符号 加速踏板深度特征 均值 跟驰阶段 AP_mean_1 横向换道阶段 AP_mean_2 超车回位阶段 AP_mean_3 稳定阶段 AP_mean_4 最大值 跟驰阶段 AP_max_1 横向换道阶段 AP_max_2 超车回位阶段 AP_max_3 稳定阶段 AP_max_4 标准差 跟驰阶段 AP_std_1 横向换道阶段 AP_std_2 超车回位阶段 AP_std_3 稳定阶段 AP_std_4 方差 跟驰阶段 AP_var_1 横向换道阶段 AP_var_2 超车回位阶段 AP_var_3 稳定阶段 AP_var_4 加速时长占比 加速时长占比 跟驰阶段 AccT_ratio_1 横向换道阶段 AccT_ratio_2 超车回位阶段 AccT_ratio_3 稳定阶段 AccT_ratio_4 阶段时长占比 时长占比 跟驰阶段 Dur_ratio_1 横向换道阶段 Dur_ratio_2 超车回位阶段 Dur_ratio_3 稳定阶段 Dur_ratio_4 方向盘转角特征 最大值 横向换道阶段 Swa_max_2 超车回位阶段 Swa_max_3 标准差 横向换道阶段 Swa_std_2 超车回位阶段 Swa_std_3
下载: 导出CSV
表 4 特征重要性排序
Table 4. Feature importance ranking
特征重要性排名 特征名称 特征重要性得分 1 AccT_ratio_2 0.4096 2 AccT_ratio_1 0.0741 3 AP_max_2 0.0725 4 Dur_ratio_4 0.0586 5 AP_max_1 0.0447 6 AP_max_3 0.0423 7 AccT_ratio_3 0.0383 8 AP_meean_1 0.0316 9 Dur_ratio_1 0.0304 10 AP_meean_2 0.0263
下载: 导出CSV
表 5 ACO参数设置
Table 5. ACO parameter settings
参数名称 取值 蚁群规模 100 最大迭代次数 200 信息素重要性权重 1 启发式权重 2.0 信息素挥发系数 0.2 精英蚂蚁数 3 最小特征占比 0.1 最大特征占比 0.9 初始信息素浓度 0.5
下载: 导出CSV
表 6 算法对比
Table 6. Algorithm comparison
模型 准确率 精确率 召回率 F1分数 XGBoost 0.902 0.854 0.848 0.849 RF-ACO-XGBoost 0.909 0.865 0.861 0.862 RF-ACO_FL-XGBoost 0.932 0.900 0.901 0.900
下载: 导出CSV
-
[1] FERRER A L C, THOMÉ A M T. Carbon emissions in transportation: a synthesis framework[J]. Sustainability, 2023, 15 (11): 8475. doi: 10.3390/su15118475 [2] JIANG Q, OSSART F, MARCHAND C. Comparative study of real-time hev energy management strategies[J]. IEEE Transactions on Vehicular Technology, 2017, 66(12): 10875-10888. doi: 10.1109/TVT.2017.2727069 [3] WANG Y, BOGGIO-MARZET A. Evaluation of eco-driving training for fuel efficiency and emissions reduction according to road type[J]. Sustainability, 2018, 10(11): 3891. [4] MESEGUER J E, TOH C K, CALAFATE C M, et al. Driving-styles: a mobile platform for driving styles and fuel consumption characterization[J]. Journal of Communications and Networks, 2017, 19(2): 162-168. doi: 10.1109/JCN.2017.000025 [5] 李潇汉. 基于大数据的公交车驾驶人生态驾驶评估方法研究[D]. 长春: 吉林大学, 2022.LI X H. Research on eco-driving evaluation method of bus drivers based on big data[D]. Changchun: Jilin University, 2022. (in Chinese) [6] 洪金龙, 高炳钊, 董世营, 等. 智能网联汽车节能优化关键问题与研究进展[J]. 中国公路学报, 2021, 34(11): 306-334.HONG J L, GAO B Z, DONG S Y, et al. Key problems and research progress of energy saving optimization for intelligent connected vehicles[J]. China Journal of Highway and Transport, 2021, 34(11): 306-334. (in Chinese) [7] 付锐, 张雅丽, 袁伟. 生态驾驶研究现状及展望[J]. 中国公路学报, 2019, 32(3): 1-12.FU R, ZHANG Y L, YUAN W. Progress and prospect in research on eco-driving[J]. China Journal of Highway and Transport, 2019, 32(3): 1-12. (in Chinese) [8] RAHMAN M, CHOWDHURY M, XIE Y, et al. Review of microscopic lane-changing models and future research opportunities[J]. IEEE transactions on intelligent transportation systems, 2013, 14(4): 1942-1956. [9] 戢晓峰, 俸才梅, 李武, 等. 双车道公路超车行为安全研究进展[J]. 安全与环境学报, 2025, 25(1): 21-40.JI X F, FENG C M, LI W, et al. Advancements in the study of overtaking behavior safety on two-lane two-way highways[J]. Journal of Safety and Environment, 2025, 25(1): 21-40. (in Chinese) [10] 秦雅琴, 张静, 贾现广, 等. 基于SEM的双车道公路超车行为安全评价[J]. 安全与环境学报, 2017, 17(4): 1359-1364.QIN Y Q, ZHANG J, JIA X G, et al. Safety evaluation for the overtaking behavior on the two-lane highway based on the structural equation model[J]. Journal of Safety and Environment, 2017, 17(4): 1359-1364. (in Chinese) [11] BRANZI V, MEOCCI M, DOMENICHINI L, et al. A combined simulation approach to evaluate overtaking behaviour on two-lane two-way rural roads[J]. Journal of Advanced Transportation, 2021, 2021: 1-18. [12] SONG D J, ZHU B, ZHAO J, et al. . Modeling lane-changing spatiotemporal features based on the driving behavior generation mechanism of human drivers[J]. Expert Systems With Applications, 2025, 284: 127974. [13] 戢晓峰, 戴秉佑, 普永明, 等. 基于生存分析的山区双车道公路超车持续时间模型[J]. 交通运输系统工程与信息, 2022, 22(6): 183-190.JI X F, DAI B Y, PU Y M, et al. Overtaking duration model of two-lane mountainous highways based on survival analysis[J]. Journal of Transportation Systems Engineering and Information Technology, 2022, 22(6): 183-190. (in Chinese) [14] MENG H L, ZHAO X Y, CHEN J Y, et al. Study on physiological representation of passenger cognitive comfort: an example with overtaking scenarios[J]. Transportation Research Part F: Traffic Psychology and Behaviour, 2024, 102: 241-259. doi: 10.1016/j.trf.2024.03.003 [15] YAMADA Y, BAKIBILLAH A S M, HASHIKURA K, et al. Autonomous vehicle overtaking: modeling and an optimal trajectory generation scheme[J]. Sustainability, 2022, 14(3): 1807-1807. doi: 10.3390/su14031807 [16] DONG H X, ZHUANG W C, WU G Y, et al. Overtaking-enabled eco-approach control at signalized intersections for connected and automated vehicles[J]. IEEE Transactions on Intelligent Transportation Systems, 2024, 25(5): 4527-4539. doi: 10.1109/TITS.2023.3328022 [17] 程颖, 张佳乐, 张少君, 等. 大型货运车辆生态驾驶及节油潜力评估[J]. 交通运输系统工程与信息, 2020, 20(6): 253-258.CHENG Y, ZHANG J L, ZHANG S J, et al. Evaluation of eco-driving behavior and fuel-saving potential of large freight vehicles[J]. Journal of Transportation Systems Engineering and Information Technology, 2020, 20(6): 253-258. (in Chinese) [18] XU N, LI X H, YUE F L, et al. An eco-driving evaluation method for battery electric bus drivers using low-frequency big data[J]. IEEE Transactions on Intelligent Transportation Systems, 2023, 24(9), 9296-9308. doi: 10.1109/TITS.2023.3267187 [19] CHEN C, ZHAO X H, YAO Y, et al. Driver's eco-driving behavior evaluation modeling based on driving events[J]. Journal of Advanced Transportation, 2018, 2018(1): 1-12. [20] 邹智宏, 李超, 邓聚才, 等. 基于mRMR特征优化算法的油耗预测建模研究[J]. 计算机仿真, 2023, 40(3): 186-191.ZOU Z H, LI C, DENG J C, et al. Research on fuel consumption prediction modeling based on max-relevance and min-redundancy feature optimization algorithm[J]. Computer Simulation, 2023, 40(3): 186-191. (in Chinese) [21] 季学武, 费聪, 何祥坤, 等. 基于LSTM网络的驾驶意图识别及车辆轨迹预测[J]. 中国公路学报, 2019, 32(6): 34-42.JI X W, FEI C, HE X K, et al. Intention recognition and trajectory prediction for vehicles using LSTM network[J]. China Journal of Highway and Transport, 2019, 32(6): 34-42. (in Chinese) [22] 伍毅平, 赵晓华, 荣建, 等. 基于驾驶模拟实验的生态驾驶行为节能减排潜力[J]. 北京工业大学学报, 2015, 41(8): 1212-1218.WU Y P, ZHAO X H, RONG J, et al. Potential of eco-driving in reducing fuel consumption and emissions based on a driving simulator[J]. Journal of Beijing University of Technology, 2015, 41(8): 1212-1218. (in Chinese) [23] SHOJAIE A, Fox E B. Granger causality: a review and recent advances[J]. Annual Review of Statistics and Its Application, 2022, 9(1): 289-319. [24] 柯星安, 赵丹, 王秋鸿, 等. 基于模型群的重型货车交通安全风险因素分析[J]. 交通信息与安全, 2024, 42(4): 72-80. doi: 10.3963/j.jssn.1674-4861.2024.04.008KE X A, ZHAO D, WANG Q H, et al. An analysis of risk factors of traffic safety for heavy trucks based on model group[J]. Journal of Transport Information and Safety, 2024, 42(4): 72-80. (in Chinese) doi: 10.3963/j.jssn.1674-4861.2024.04.008 [25] 李庆刚, 蔡宝玉, 孙小江. 基于多目标蚁群算法的无线网络数据传输节点避免拥塞优选方法[J]. 吉林大学学报(工学版), 2025, 55(2): 748-754.LI Q G, CAI B Y, SUN X J, et al. A congestion avoidance optimization method for wireless network data transmission nodes based on multi-objective ant colony algorithm[J]. Journal of Jilin University(Science Edition), 2025, 55(2): 748-754. (in Chinese) [26] 吕能超, 彭凌枫, 吴超仲, 等. 区分冲突类型的路段实时碰撞风险预测模型[J]. 中国公路学报, 2022, 35(1): 93-108.LYU N C, PENG L F, WU C Z, et al. Real-time crash-risk prediction model that distinguishes collision types[J]. China Journal of Highway and Transport, 2022, 35(1): 93-108. (in Chinese) [27] 陈英, 朱加勋, 田毅, 等. 基于K-Means-XGBoost-SHAP集成化框架的交通事故严重程度致因分析[J]. 中国公路学报, 2025, 38(5): 209-223.CHEN Y, ZHU J X, TIAN Y, et al. Analysis of factors contributing to traffic accident severity based on an integrated framework of K-Means-XGBoost-SHAP[J]. China Journal of Highway and Transport, 2025, 38(5): 209-223. (in Chinese) -


 点击查看大图
点击查看大图

计量
- 文章访问数: 7
- HTML全文浏览量: 3
- PDF下载量: 1
- 被引次数: 0