

A Coordinated and Coupled Control and Optimization Method of Intelligent Connected Vehicle Platoons and Traffic Signals Based on Hierarchical Architecture
-
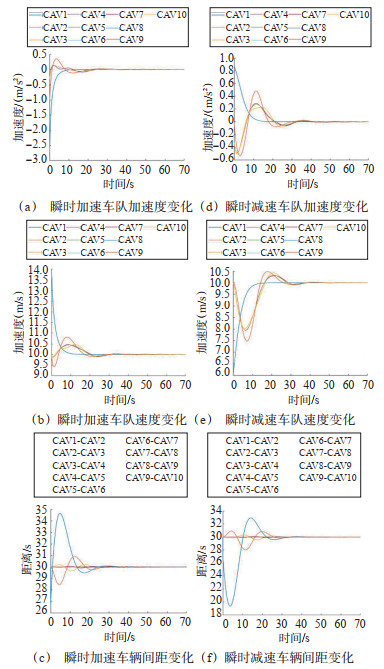
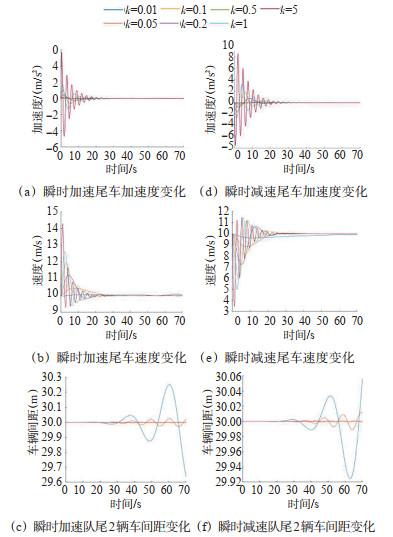
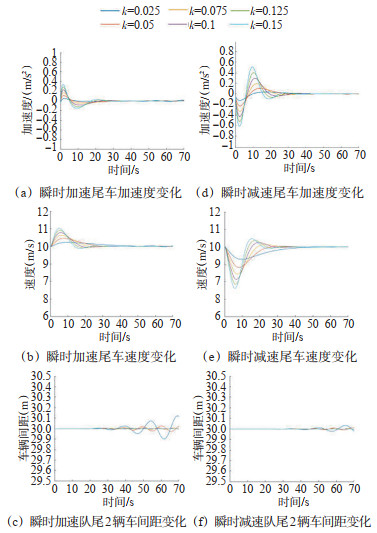
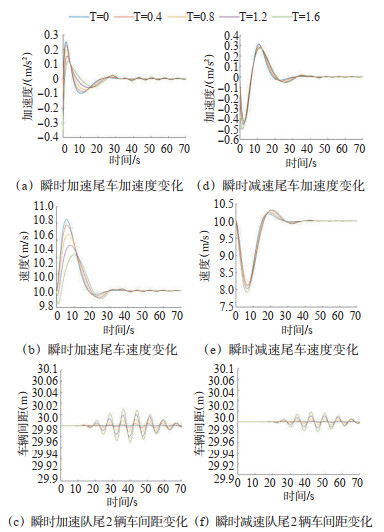
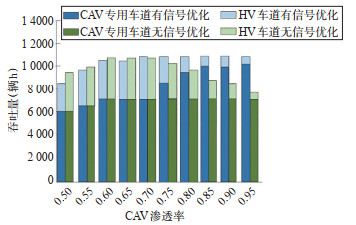
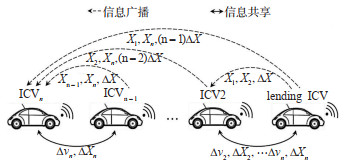
摘要: 为克服现有交通控制方法在处理智能网联车辆(intelligent connected vehicles,ICV)与人工驾驶车辆(human-driven vehicles,HDV)混合流时,难以有效协同车辆编队控制与信号配优的局限,研究了1种“车辆-信号”分层协同控制架构,旨在通过下层ICV跟驰控制与上层信号优化的动态联动,实现道路时空资源的一体化高效分配。在下层控制中,为提升编队行驶的稳定性与鲁棒性,对经典智能驾驶人模型(intelligent driver model,IDM)进行了队列式改进,构建了改进的队列式智能驾驶人模型(platoon IDM, PIDM)。引入了1种多前车状态反馈机制,即跟随车的加速度不仅取决于其前车(immediate predecessor)的状态,同时融合了领头车(leader)的速度与间距信息作为前馈补偿项。该机制通过1个可调权重系数k予以实现,有效抑制了由波传播效应引发的编队串扰震荡。通过李雅普诺夫稳定性理论,严格证明了即使在单车发生短时加速/减速故障而偏离平衡状态时,该反馈机制也能确保整个车队系统渐近恢复至稳定行驶平衡点。在上层控制中,设计了1种与下层编队状态动态耦合的信号优化策略。该策略实现了“ICV专用相位”与弹性绿波协调算法的结合:①为ICV车队提供专属通行时间窗;②基于PIDM实时输出的编队平均速度与到达时间预测,动态调整相序与相位差,生成1条穿越多个路口的不停车“绿波带”,从而最小化ICV车队及后续HDV的停车延误。仿真实验表明:本文的PIDM控制模型可在ICV车队发生短时加速或减速故障并使车队运行状态偏离稳定状态时,使其逐渐恢复至原来的平衡状态。当反馈权重系数k的取值范围为[0.075, 0.125]时,PIDM具有较好的控制效果;当响应延误时间T为0 s时,PIDM可以获得理想的控制效果。随着车队模型中响应延误时间T的增加,系统控制量的振幅与频率均增大,但依然能够维持车队系统的稳定运行。此外,在ICV渗透率80%的场景下,协同控制方案较无专用相位方案提升交叉口总通行能力14.16%,ICV专用道容量提升14.78%。研究结果验证了分层架构在保障HDV通行效率的同时,显著提升ICV时空资源利用率的有效性Abstract: To address the challenge of the disconnection between vehicle platoon control and traffic signal optimization in a mixed traffic environment consisting of intelligent connected vehicles (ICV) and human-driven vehicles (HDV), this study investigates a hierarchical "vehicle-signal" cooperative control architecture. The aim is to achieve integrated and efficient allocation of road spatio-temporal resources through dynamic interaction between lower-level ICV car-following control and upper-level signal optimization. In the lower-level control, to enhance platoon stability and robustness, this study improves the classical intelligent driver model (IDM) and constructs an enhanced platoon-based intelligent driver model (PIDM). Its core innovation lies in introducing a multi-predecessor state feedback mechanism, whereby the acceleration of a following vehicle is determined not only by the state of its immediate predecessor but also incorporates the velocity and spacing information of the leader vehicle as a feedforward compensation term. This mechanism is implemented via an adjustable weighting coefficient k, effectively suppressing platoon string instability caused by wave propagation effects. Furthermore, using Lyapunov stability theory, this study rigorously proves that even if a single vehicle experiences short-term acceleration or deceleration failures causing deviation from the equilibrium state, this feedback mechanism ensures the entire platoon system asymptotically returns to a stable operating equilibrium point. In the upper-level control, a signal optimization strategy dynamically coupled with the lower-level platoon states is designed. This strategy pioneers the combination of a "dedicated ICV phase" and an adaptive green wave coordination algorithm: on one hand, it provides exclusive time windows for ICV platoons; on the other hand, based on real-time predictions of platoon average speed and arrival time output by the PIDM, it dynamically adjusts phase sequence and offset to generate a seamless "green wave" band through multiple intersections, thereby minimizing stop delays for both ICV platoons and subsequent HDVs. Simulation experiments demonstrate that the proposed PIDM control model can gradually restore an ICV platoon to its original equilibrium state after short-term acceleration or deceleration failures cause deviation from stability. When the feedback weighting coefficient k falls within the range of [0.075, 0.125], the PIDM achieves satisfactory control performance; ideal control effectiveness is obtained when the response delay time T is 0 s. As the response delay time T increases in the platoon model, the amplitude and frequency of the system control input both increase, yet the platoon system remains stable. Moreover, under an ICV penetration rate of 80%, the cooperative control scheme improves the total intersection throughput by 14.16% and the capacity of the ICV-dedicated lane by 14.78% compared to a scheme without a dedicated phase. The results verify the effectiveness of the hierarchical architecture in significantly enhancing the spatio-temporal resource utilization of ICVs while ensuring the traffic efficiency of HDVs.
-

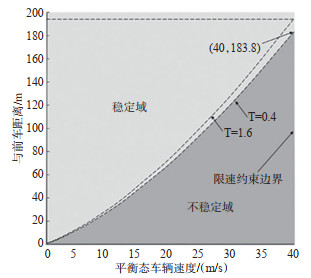
图 2 车辆平衡态速度与车辆间距在不同通信延迟范围内的稳定域变化
Figure 2. Stability domain changes of vehicle equilibrium speed and vehicle distance in different communication delay ranges

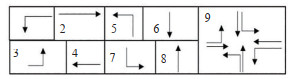
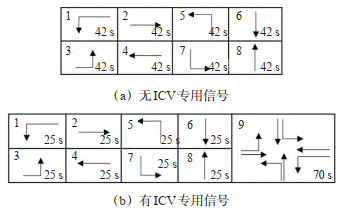
图 4 具有ICV专用车道的信号交叉口示意图
Figure 4. Schematic diagram of a signalized intersection with a ICV lane
表 1 各方向交通需求量
Table 1. Traffic demand by direction
单位: 辆/h 车辆类型 出口 进口 东 南 西 北 HDV 东 250 250 南 250 250 西 250 250 北 250 250 ICV 东 1 000 1 000 南 1 000 1 000 西 1 000 1 000 北 1 000 1 000  下载: 导出CSV
下载: 导出CSV
表 2 ICV专用道信号优化控制表现
Table 2. ICV lane signal optimization control performance
评价指标 有ICV专用道信号优化控制 无ICV专用道信号优化控制 增量% 总通行能力 10 000 8 760 14.16 ICV专用道通行能力 8 000 6 970 14.78 HDV车道通行能力 2 000 2 000
下载: 导出CSV
-
[1] 王方凯, 杨晓光, 江泽浩, 等. 新型混合交通流场景下交叉口信号控制和轨迹控制协同优化方法[J]. 交通信息与安全, 2024, 42(1): 76-83. doi: 10.3963/j.jssn.1674-4861.2024.01.009WANG F K, YANG X G, JIANG Z H, et al. Joint optimization of intersection signal control and trajectory control in novel heterogenous traffic flow scenarios[J]. Journal of Transport Information and Safety, 2024, 42(1): 76-83. (in Chinese) doi: 10.3963/j.jssn.1674-4861.2024.01.009 [2] 秦严严, 王昊, 王炜, 等. 自适应巡航控制车辆跟驰模型综述[J]. 交通运输工程学报, 2017, 17(3): 121-130.QIN Y Y, WANG H, WANG W, et al. Review of car-following models of adaptive cruise control[J]. Journal of Traffic and Transportation Engineering, 2017, 17(3): 121-130. (in Chinese) [3] 吴兵, 王文璇, 李林波, 等. 多前车影响的智能网联车辆纵向控制模型[J]. 交通运输工程学报, 2020, 20(2): 184-194.WU B, WANG W X, LI L B, et al. Longitudinal control model for connected autonomous vehicles influenced by multiple preceding vehicles[J]. Journal of Traffic and Transportation Engineering, 2020, 20(2): 184-194. (in Chinese) [4] 常鑫, 李海舰, 荣建, 等. 混有智能网联车辆交通流车道管理策略研究[J]. 交通工程, 2020, 20(5): 38-43.CHANG X, LI H J, RONG J, et al. Research on different lane policies for mixed traffic flow with intelligent connected vehicles[J]. Journal of Transportation Engineering, 2020, 20 (5): 38-43. (in Chinese) [5] WANG P, WU X, HE X. Modeling and analyzing cyberattack effects on connected automated vehicular platoons[J]. Transportation Research Part C: Emerging Technologies, 2020, 115: 102625. doi: 10.1016/j.trc.2020.102625 [6] 魏丽英, 吴润泽. 基于鱼群效应的智能网联车队形成与演化机理研究[J]. 交通运输系统工程与信息, 2024, 24(2): 76-85.WEI L Y, WU R Z. Formation and evolution mechanism of connected and autonomous fleet based on fish streaming effect[J]. Journal of Transportation Systems Engineering and Information Technology, 2024, 24(2): 76-85. (in Chinese) [7] STERN R E, CUI S, DELLE M L, et al. Dissipation of stop-and-go waves via control of autonomous vehicles: field experiments[J]. Transportation Research Part C: Emerging Technologies, 2018, 89: 205-221. doi: 10.1016/j.trc.2018.02.005 [8] LEE J W, WANG H, JANG K, et al. Traffic control via connected and automated vehicles: an open-road field experiment with 100 cavs[J]. IEEE Control Systems, 2024, 45(1): 28-60. [9] TSUGAWA S, KATO S, AOKI K. An automated truck platoon for energy saving[C]. 2011 IEEE/RSJ International Conference on Intelligent Robots and Systems, San Francisco, USA: IEEE, 2011. [10] ZHOU S, TIAN J, GE Y E, et al. Experimental features of emissions and fuel consumption in a car-following platoon[J]. Transportation Research Part D: Transport and Environment, 2023, 121: 103823. doi: 10.1016/j.trd.2023.103823 [11] 彭利明, 孙骏, 魏子淳, 等. 基于模型预测控制的智能网联车队异步避障策略[J]. 合肥工业大学学报(自然科学版), 2023, 46(11): 1454-1459.PENG L M, SUN J, WEI Z C, et al. An MPC-based asynchronous obstacle avoidance strategy for intelligent and connected vehicle platoon[J]. Journal of Hefei University of Technology(natural science), 2023, 46(11): 1454-1459. (in Chinese) [12] 柳祖鹏, 姚海铧. 智能网联车专用道内队列控制模型[J]. 交通运输研究, 2024, 10(1): 28-35.LIU Z P, YAO H H. Platoon control model of dedicated lanes for connected and autonomous vehicles[J]. Transport Research, 2024, 10(1): 28-35. (in Chinese) [13] LAZAR C, TIGANASU A. String stable vehicle platooning using adaptive cruise controlled vehicles[J]. IFAC-PapersOnLine, 2019, 52(5): 1-6. [14] ZHOU Y, AHN S, CHITTURI M, et al. Rolling horizon stochastic optimal control strategy for ACC and CACC under uncertainty[J]. Transportation Research Part C: Emerging Technologies, 2017, 83(oct.): 61-76. [15] ZHOU Y, AHN S. Robust local and string stability for a decentralized car following control strategy for connected automated vehicles[J]. Transportation research, 2019, 125(JUL.): 175-196. [16] ZHOU Y, AHN S, WANG M, et al. Stabilizing mixed vehicular platoons with connected automated vehicles: an H-infinity approach[J]. Transportation Research Part B Methodological, 2020, 132: 152-170. [17] FENG S, ZHANG Y, LI S E, et al. String stability for vehicular platoon control: definitions and analysis methods[J]. Annual Reviews in Control, 2019, 47: 81-97. [18] TREIBER M, HENNECKE A, HELBING D. Congested traffic states in empirical observations and microscopic simulations[J]. Physical Review E, 2000, 62: 1805-1824. [19] ALIREZA T, HANI S. Influence of connected and autonomous vehicles on trafficflow stability and throughput[J]. Transportation Research Part C: Emerging Technologies, 2016, 71: 143-163. [20] KESTING A, TREIBER M, SCHOENHOF M, et al. Adaptive cruise control design for active congestion avoidance[J]. Transportation Research Part C: Emerging Technologies, 2008, 16(6): 668-683. [21] 张涛, 柳祖鹏, 陈玲娟, 等. 自动驾驶车辆队列控制策略研究[J]. 机械设计与制造, 2023(8): 38-42.ZHANG T, LIU Z P, CHEN L J, et al. Research about autonomous vehicle platoon control strategy[J]. Machinery Design & Manufacture, 2023(8): 38-42. (in Chinese) [22] 郭延永, 刘佩, 袁泉, 等. 网联自动驾驶车辆道路交通安全研究综述[J]. 交通运输工程学报, 2023, 23(5): 19-38.GUO Y Y, LIU P, YUAN Q, et al. Review on research of road traffic safety of connected and automated vehicles[J]. Journal of Traffic and Transportation Engineering, 2023, 23 (5): 19-38. (in Chinese) [23] 秦严严, 王昊, 王炜, 等. 混有CACC车辆和ACC车辆的异质交通流基本图模型[J]. 中国公路学报, 2017, 30(10): 127-136.QIN Y Y, WANG H, WANG W, et al. Fundamental diagram model of heterogeneous traffic flow mixed with cooperative adaptive cruise control vehicles and adaptive cruise control vehicles[J]. China Journal of Highway and Transport, 2017, 30(10): 127-136. (in Chinese) -


 点击查看大图
点击查看大图
计量
- 文章访问数: 6
- HTML全文浏览量: 2
- PDF下载量: 0
- 被引次数: 0