

A Prediction Method for Pedestrian Trajectory in Autonomous Driving Scenarios Based on LiDAR
-
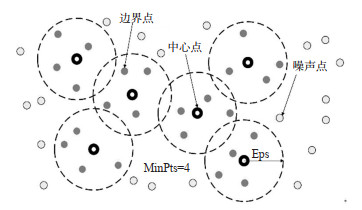
摘要: 为了提升无人驾驶场景中行人轨迹预测的精度,研究了基于激光雷达点云处理的改进型自适应交互多模型无迹卡尔曼滤波(adaptive interactive multiple model unscented Kalman filter,AIMM-UKF)的预测方法。对原始点云采用点云流式处理技术进行体素网格降采样与基于密度的空间聚类算法(density-based spatial clustering of applications with noise,DBSCAN)分割,提取行人最小外接包围盒质心作为观测输入,有效提升了输入数据的可靠性与实时性;在传统交互多模型无迹卡尔曼滤波(interactive multiple model unscented Kalman filter,IMM-UKF)IMM-UKF基础上引入3层自适应机制:基于似然函数的时变转移概率动态调整模型切换,设计模型权重二次修正因子强化优胜模型并抑制非匹配模型干扰,以及观测噪声协方差随点云密度自适应调节,以应对远距离点云稀疏问题。在园区实车测试场景下,利用VLP-32激光雷达对5~20 m的行人轨迹数据进行验证,实验结果表明:与传统IMM-UKF相比,本文方法总体预测误差降低23.02%,急转向峰值误差降低29.76%;在5~20 m范围内,误差降幅稳定在21%以上,其中20 m距离下预测误差由27.15 cm降至21.26 cm,表现出良好的远距离适应能力。与主流生成式算法(基于图注意力网络的车辆-行人互动轨迹预测模型、多尺度小波变换增强图神经网络、多行人信息融合网络)相比,本文方法的平均位移误差(average displacement error,ADE)为19.3 cm,较最优的多行人信息融合网络算法降低7.21%,同时单帧计算耗时仅62 ms,满足无人驾驶系统对实时性的高要求。该方法在结构化环境中实现了高精度、低延迟的行人轨迹预测,通过点云流式处理与自适应多模型机制的协同优化,有效提升了无人驾驶系统的动态环境感知与行为决策能力。
-
关键词:
- 智慧交通 /
- 行人轨迹预测 /
- AIMM-UKF算法 /
- 激光雷达点云处理
Abstract: To enhance pedestrian trajectory prediction accuracy in autonomous driving scenarios, this study proposes an improved adaptive interactive multiple model unscented Kalman filter (AIMM-UKF) method based on Li-DAR point cloud processing. Raw point clouds are processed using streaming techniques involving voxel grid downsampling and ensity-based spatial clustering of applications with noise (DBSCAN) clustering to extract the centroid of the minimum bounding box of pedestrians as observation input, which can enhance data reliability and real-time performance. A three-layer adaptive mechanism is introduced into the traditional interactive multiple model unscented Kalman filter (IMM-UKF) framework: time-varying transition probabilities adjusted based on likelihood functions, a weight correction factor to reinforce superior models and suppress mismatched ones, and adaptive observation noise covariance adjusted according to point cloud density to handle sparse long-range data. Experimental validation uses a VLP-32 LiDAR in a campus test scenario for pedestrian trajectories within 5 to 20 m. It shows that the proposed method reduces overall prediction error by 23.02%, and peak error during sharp turns by 29.76% compared to conventional IMM-UKF. Errors are consistently reduced by over 21% across the tested range, with the error at 20 m decreasing from 27.15 to 21.26 cm, demonstrating long-distance adaptability. Compared to state-of-the-art generative models (HSTGA, MSWTE-GNN, MPIFN), the proposed method achieves an average displacement error (ADE) of 19.3 cm, 7.21% lower than the best-performing MPIFN, while requiring only 62 ms per frame, meeting the real-time requirements of autonomous driving systems. This method enables high-accuracy, low-latency pedestrian trajectory prediction in structured environments through the synergistic optimization of point cloud streaming and adaptive multi-model filtering. -

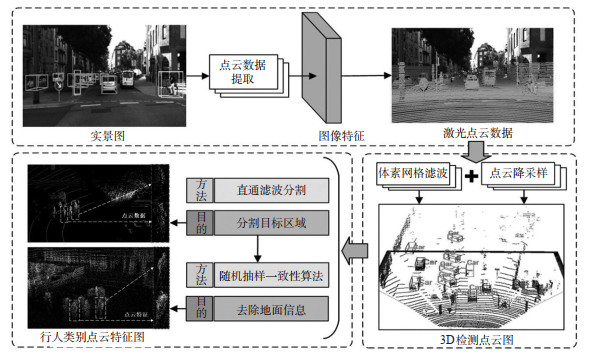
图 4 车辆及行人点云特征及检测图
Figure 4. Vehicle and pedestrian point cloud features and detection map

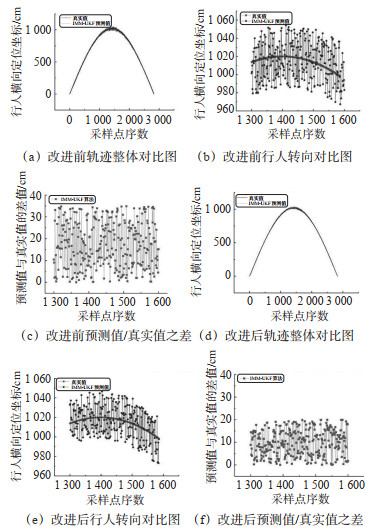
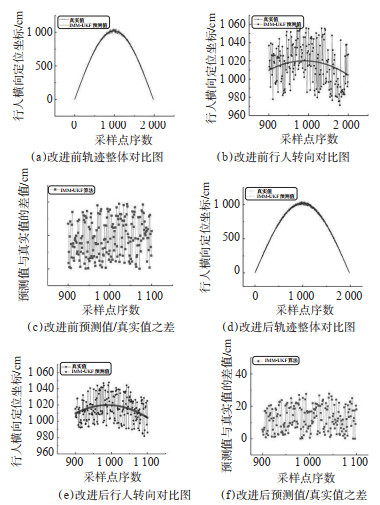
图 6 行人与无人车距离5 m算法效果对比图
Figure 6. The comparison chart of algorithm effects between the distance of 5 meters between pedestrians and unmanned vehicles

图 7 行人与无人车距离10 m算法效果对比图
Figure 7. The comparison chart of algorithm effects between the distance of 10 meters between pedestrians and unmanned vehicles

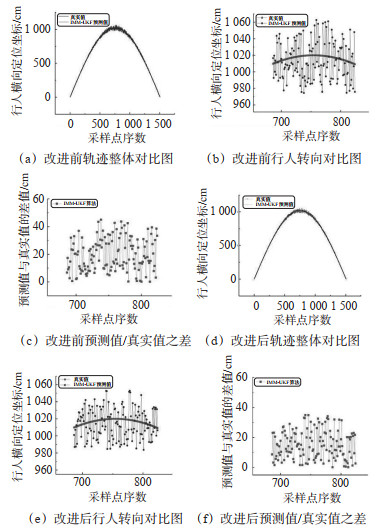
图 8 行人与无人车距离15 m算法效果对比图
Figure 8. The comparison chart of algorithm effects between the distance of 15 meters between pedestrians and unmanned vehicles

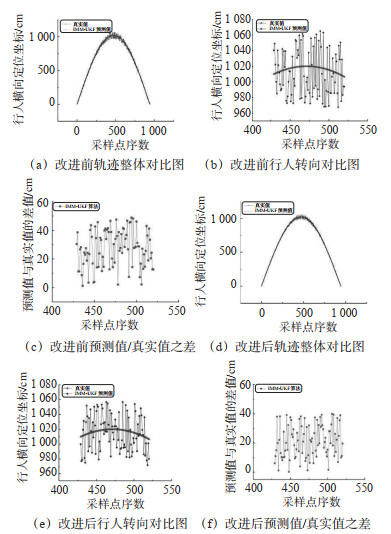
图 9 行人与无人车距离20 m算法效果对比图
Figure 9. The comparison chart of algorithm effects between the distance of 20 meters between pedestrians and unmanned vehicles

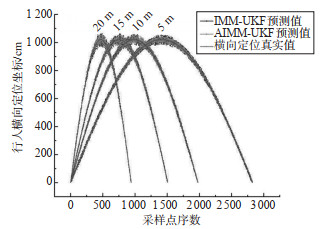
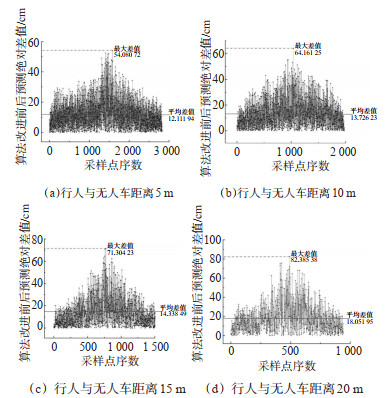
图 11 改进前后预测绝对差值对比图
Figure 11. Comparison chart of the absolute differences in predictions between AIMM-UKF algorithm and IMM-UKF algorithm
表 1 车载设备参数
Table 1. Technical specifications of vehicle-mounted equipment
设备 型号 参数 激光雷达 Velodyne VLP-32 垂直视场-25~+15°、测量范围100 m、范围精度±3 cm 工控机 ESD CAN-PCIe/402 显卡NVIDIA RTX2060、处理器i7 10750H IMU GNSS LPMS-1G1 RS232 RTK天线 频率200 Hz,RS232,USB PPS脉冲输出:HX-GPS1000  下载: 导出CSV
下载: 导出CSV
表 2 算法改进前后预测绝对差值参数统计
Table 2. Parameter statistics of the predicted absolute difference before and after algorithm improvement
距离/m 差值MAX 差值MIN 差值AVG 5 54.080 72 0.015 23 12.111 94 10 64.161 25 0.014 95 13.726 23 15 71.304 23 0.004 94 14.338 49 20 82.385 38 0.000 58 18.051 95
下载: 导出CSV
表 3 AIMM-UKF算法与生成式算法结果统计
Table 3. Comparison results between the AIMM-UKF algorithm and generative algorithms
算法名称 ADE/cm 计算耗时/ms AIMM-UKF 19.3 62 MPIFN 20.8 103 MSWTE-GNN 23.6 184 HSTGA 21.5 158
下载: 导出CSV
-
[1] 李克强, 熊辉, 刘金鑫. 面向弱势道路使用者的多目标运动轨迹预测方法[J]. 中国公路学报, 2022, 35(1): 298-315.LI K Q, XIONG H, LIU J X. Multi-objective motion trajectory prediction method for vulnerable road users[J]. China Journal of Highway and Transport, 2022, 35(1): 298-315. (in Chinese) [2] 曹昊天, 施惠杰, 宋晓琳, 等. 基于多特征融合的行人意图以及行人轨迹预测方法研究[J]. 中国公路学报, 2022, 35(10): 308-318.CAO H T, SHI H J, SONG X L, et al. Research on pedestrian intention and trajectory prediction method based on multi-feature fusion[J]. China Journal of Highway and Transport, 2022, 35(10): 308-318. (in Chinese) [3] MA Q L, ZOU Q, HUANG Y, et al. Dynamic pedestrian trajectory forecasting with LSTM-based Delaunay triangulation[J]. Applied Intelligence, 2022, 52(3): 3018-3028. doi: 10.1007/s10489-021-02562-5 [4] WANG H H, ZHI W M, BATISTA G, et al. Pedestrian trajectory prediction using goal-driven and dynamics-based deep learning framework[J]. Expert Systems with Applications, 2025, 271: 126557. doi: 10.1016/j.eswa.2025.126557 [5] ALGHODHAIFI H, LAKSHMANAN S. Holistic spatio-temporal graph attention for trajectory prediction in vehicle-pedestrian interactions[J]. Sensors, 2023, 23(17): 7361. doi: 10.3390/s23177361 [6] 高嵩, 周江邻, 高博麟, 等. 基于多信息融合网络的行人轨迹预测方法[J]. 汽车工程, 2024, 46(11): 1973-1982.GAO S, ZHOU J L, GAO B L, et al. Pedestrian trajectory prediction method based on multi-information fusion network[J]. Automotive Engineering, 2024, 46(11): 1973-1982. (in Chinese) [7] LIN X, ZHANG Y, WANG S, et al. Multi-scale wavelet transform enhanced graph neural network for pedestrian trajectory prediction[J]. Physica A: Statistical Mechanics and its Applications, 2025, 659: 130319. doi: 10.1016/j.physa.2024.130319 [8] 孔玮, 刘云, 李辉, 等. 基于深度学习的行人轨迹预测方法综述[J]. 控制与决策, 2021, 36(12): 2841-2850.KONG W, LIU Y, LI H, et al. A review of pedestrian trajectory prediction methods based on deep learning[J]. Control and Decision, 2021, 36(12): 2841-2850. (in Chinese) [9] 王瑞平, 宋晓, 陈凯, 等. 基于行人姿态的轨迹预测方法[J]. 北京航空航天大学学报, 2023, 49(7): 1743-1754.WANG R P, SONG X, CHEN K, et al. Trajectory prediction method based on pedestrian posture[J]. Journal of Beijing University of Aeronautics and Astronautics, 2023, 49(7): 1743-1754. (in Chinese) [10] 刘召, 宋立滨, 于涛, 等. 基于行人轨迹预测的全向移动机器人路径规划[J]. 计算机仿真, 2018, 35(1): 310-314.LIU Z, SONG L B, YU T, et al. Path planning for omnidirectional mobile robots based on pedestrian trajectory prediction[J]. Computer Simulation, 2018, 35(1): 310-314. (in Chinese) [11] 顾立鹏, 孙韶媛, 刘训华, 等. 基于激光点云坐标系的3D多目标跟踪算法研究[J]. 激光与红外, 2021, 51(10): 1307-1313.GU L P, SUN S Y, LIU X H, et al. Research on 3D multi-target tracking algorithm based on laser point cloud coordinate system[J]. Laser & Infrared, 2021, 51(10): 1307-1313. (in Chinese) [12] 陈锐锋, 赵立业. 交互式多模型算法改进视觉惯性定位技术[J]. 导航定位学报, 2024, 12(5): 80-88.CHEN R F, ZHAO L Y. Visual-inertial localization technology improved by interactive multiple model algorithm[J]. Journal of Navigation and Positioning, 2024, 12(5): 80-88. (in Chinese) [13] YANG B, ZHU S Q, HE X P. IMM robust cardinality balance multi-Bernoulli filter for multiple maneuvering target tracking with interval measurement[J]. Chinese Journal of Electronics, 2021, 30(6): 1141-1151. [14] 南奔洋, 匡兵, 景晖. 基于改进自适应交互式多模型无迹卡尔曼滤波算法的车辆目标跟踪[J]. 科学技术与工程, 2025, 25(11): 4605-4611.NAN B Y, KUANG B, JING H. Vehicle target tracking based on improved adaptive interactive multiple model unscented Kalman filter algorithm[J]. Science Technology and Engineering, 2025, 25(11): 4605-4611. (in Chinese) [15] 陈光武, 王思琪, 司涌波, 等. 基于自适应交互式多卡尔曼滤波模型的组合导航算法研究[J]. 电子与信息学报, 2024, 46(12): 4493-4503.CHEN G W, WANG S Q, SI Y B, et al. Integrated navigation algorithm based on adaptive interacting multiple Kalman filter model[J]. Journal of Electronics & Information Technology, 2024, 46(12): 4493-4503. (in Chinese) [16] 康雅文, 闵华松, 陈鸣宇, 等. PCL环境下粒子滤波目标跟踪算法研究[J]. 计算机工程, 2017, 43(9): 304-309.KANG Y W, MIN H S, CHEN M Y, et al. Particle filter target tracking algorithm in PCL environment[J]. Computer Engineering, 2017, 43(9): 304-309. (in Chinese) [17] 陈仲生, 李潮林, 左旺, 等. 双重下采样增强的点云改进配准算法研究[J]. 汽车工程, 2023, 45(4): 572-578.CHEN Z S, LI C L, ZUO W, et al. Improved point cloud registration algorithm with dual downsampling enhancement[J]. Automotive Engineering, 2023, 45(4): 572-578. (in Chinese) [18] 奇格奇, 曹琳琪, 沈益达, 等. 基于GNSS轨迹数据的公交多能源供需网络调度优化模型[J]. 交通信息与安全, 2025, 43(3): 85-99. doi: 10.3963/j.jssn.1674-4861.2025.03.009QI G Q, CAO L Q, SHEN Y D, et al. Optimization model for multi-energy supply-demand network scheduling of buses based on GNSS trajectory data[J]. Journal of Transport Information and Safety, 2025, 43(3): 85-99. (in Chinese) doi: 10.3963/j.jssn.1674-4861.2025.03.009 [19] 杨秀建, 黄甲龙, 张生斌, 等. 基于激光雷达的无人车辆非结构化环境联级点云分割算法[J]. 光学学报, 2025, 45(8): 263-276.YANG X J, HUANG J L, ZHANG S B, et al. Cascade point cloud segmentation algorithm for unmanned vehicles in unstructured environments based on LiDAR[J]. Acta Optica Sinica, 2025, 45(8): 263-276. (in Chinese) [20] 周玉, 朱文豪, 房倩, 等. 基于聚类的离群点检测方法研究综述[J]. 计算机工程与应用, 2021, 57(12): 37-45.ZHOU Y, ZHU W H, FANG Q, et al. A review of outlier detection methods based on clustering[J]. Computer Engineering and Applications, 2021, 57(12): 37-45. (in Chinese) [21] KHATIBI R, NADIRI A. Inclusive multiple models(IMM) for predicting groundwater levels and treating heterogeneity[J]. Geoscience Frontiers, 2021, 12(2): 713-724. doi: 10.1016/j.gsf.2020.07.011 [22] 常鑫, 马光辉, 高建树, 等. 基于机场活动地图信息改进AIMM-UKF算法的移动目标跟踪[J]. 交通信息与安全, 2024, 42(2): 87-94, 104. doi: 10.3963/j.jssn.1674-4861.2024.02.009CHANG X, MA G H, GAO J S, et al. Mobile target tracking using improved AIMM-UKF algorithm based on airport activity map information[J]. Journal of Transport Information and Safety, 2024, 42(2): 87-94, 104. (in Chinese) doi: 10.3963/j.jssn.1674-4861.2024.02.009 [23] 周云水, 高澄宇, 黄圣杰, 等. 一种高动态场景下视觉激光融合SLAM系统[J]. 汽车工程, 2025, 47(9): 1712-1720.ZHOU Y S, GAO C Y, HUANG S J, et al. A visual-LiDAR fused SLAM system for high-dynamic scenarios[J]. Automotive Engineering, 2025, 47(9): 1712-1720. (in Chinese) -


 点击查看大图
点击查看大图
计量
- 文章访问数: 9
- HTML全文浏览量: 4
- PDF下载量: 0
- 被引次数: 0