

A Kinematic Model and Trajectory Tracking Control of Tractor-Aircraft System Based on Front Wheel Angle Compensation
-
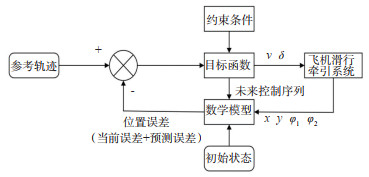
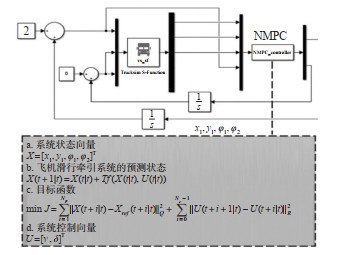
摘要: 传统的牵引车-飞机系统运动学模型在低速滑行牵引工况下精度不足,导致轨迹跟踪控制误差大、响应慢,难以满足新型离港方式对轨迹精度和安全性的高要求。为提升运动学模型精度与轨迹跟踪性能,研究了基于牵引车前轮转向角补偿函数的运动学模型补偿方法。以威海广泰AM210无杆牵引车和B737-800飞机为研究对象,先建立传统的牵引车-飞机系统运动学模型,然后将传统运动学模型与Trucksim车辆模型进行开环联合仿真对比分析,通过引入补偿函数来补偿2种模型之间的轨迹偏差,同时设计了基于非线性模型预测控制(nonlinear model predictive control,NMPC)的牵引车-飞机系统轨迹跟踪控制器。以双移线工况作为参考轨迹,搭建MATLAB/Simulink与Trucksim闭环联合仿真模型,并将NMPC控制器与传统比例积分微分控制(proportional integral derivative,PID)的轨迹跟踪控制器进行轨迹仿真对比分析,验证NMPC控制器的优越性。进一步在2 m/s和4 m/s牵引车速度下分别对基于传统、补偿后的运动学模型的NMPC控制器跟踪性能进行评估并且分析存在不同初始偏差下对牵引车-飞机系统轨迹跟踪性能的影响。仿真结果显示:在2 m/s和4 m/s牵引车速度下基于补偿后的运动学模型的NMPC控制器可以使跟踪峰值误差分别降低61.93%和41.63%,均方根误差分别降低56.14%和37.69%。在存在的初始偏差情况下,基于NMPC的轨迹跟踪控制器能够使系统在30 s内完成对初始偏差(横向偏差0.5~1 m、航向角偏差0.05~0.1 rad)的修正,无超调现象。Abstract: The traditional kinematic model of the tractor-aircraft system exhibits insufficient accuracy under low-speed taxiing towing conditions, resulting in significant trajectory tracking control errors and slow responses, which is difficult to meet the stringent requirements for trajectory accuracy and safety for the new departure mode. To improve the accuracy of the kinematic model and the performance of trajectory tracking, this study proposes a kinematic model compensation method based on a front wheel steering angle compensation function of the tractor. Taking the Weihai Guangtai AM210 rodless tractor and the B737-800 aircraft as research objects, a traditional kinematic model of the tractor-aircraft system is first established. Then, the traditional kinematic model and the Trucksim vehicle model are subjected to open-loop joint simulation and comparative analysis. The trajectory deviations between these two models are compensated by introducing a compensation function. Meanwhile, a trajectory tracking controller for the tractor-aircraft system based on nonlinear model predictive control (NMPC) is designed. Taking the double-shifting line condition as the reference trajectory, a closed-loop joint simulation model utilizing MATLAB/Simulink and Trucksim is built, and the trajectory simulation comparison and analysis between the NMPC controller and the traditional proportional-integral-derivative control trajectory tracking controller are conducted to verify the superiority of the NMPC controller. The tracking performance of the NMPC controller based on the traditional and compensated kinematic models is further evaluated at tractor speeds of 2 m/s and 4 m/s respectively, and the influence of different initial deviations on the trajectory tracking performance of the tractor-aircraft system is analyzed. The simulation results show that the NMPC controller based on the compensated kinematic model can reduce the peak tracking error by 61.93% and 41.63%, and the root mean square errors by 56.14% and 37.69%, at tractor speeds of 2 m/s and 4 m/s, respectively. Under the condition of existing initial deviations, the trajectory tracking controller based on NMPC can enable the system to correct the initial deviations (lateral deviation of 0.5 to 1 m and heading angle deviation of 0.05 to 0.1 rad) within 30 s without overshoot.
-

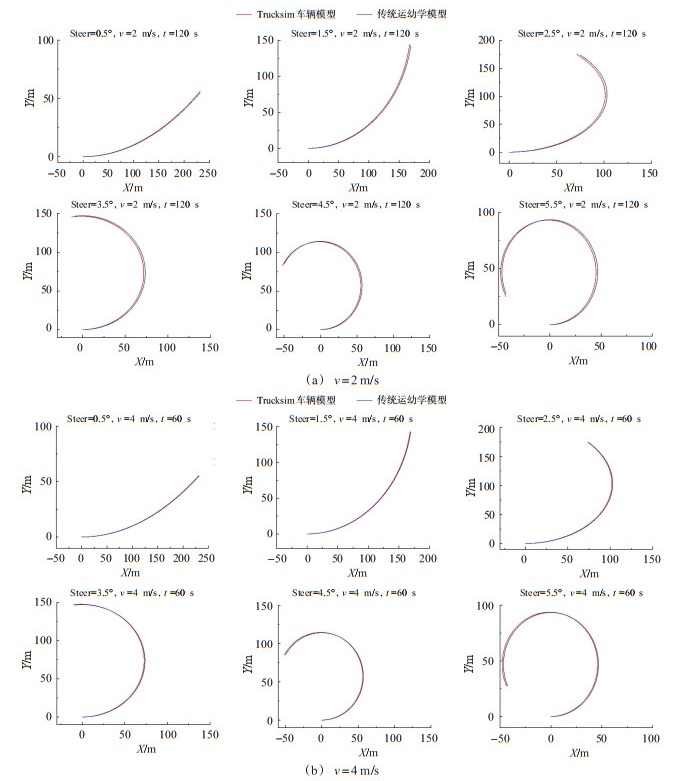
图 2 传统运动学模型与Trucksim车辆模型铰接点的轨迹比较
Figure 2. A comparison of the trajectories of hinge points between the traditional kinematic model and the Trucksim vehicle model

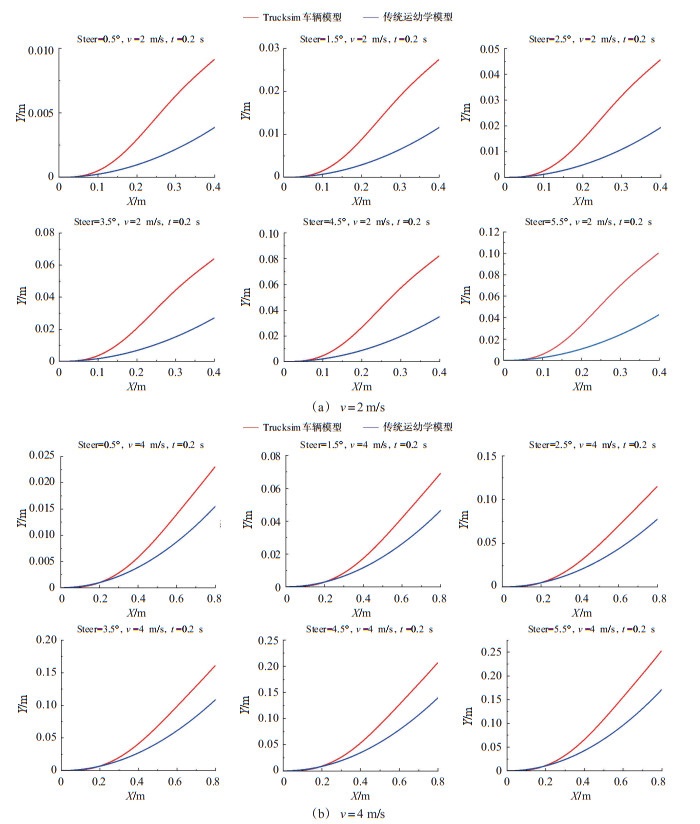
图 4 传统运动学模型与Trucksim车辆模型在初始0.2 s内铰接点的轨迹比较
Figure 4. A comparison of the trajectories of hinge points within the initial 0.2 seconds between the traditional kinematic model and the Trucksim vehicle model

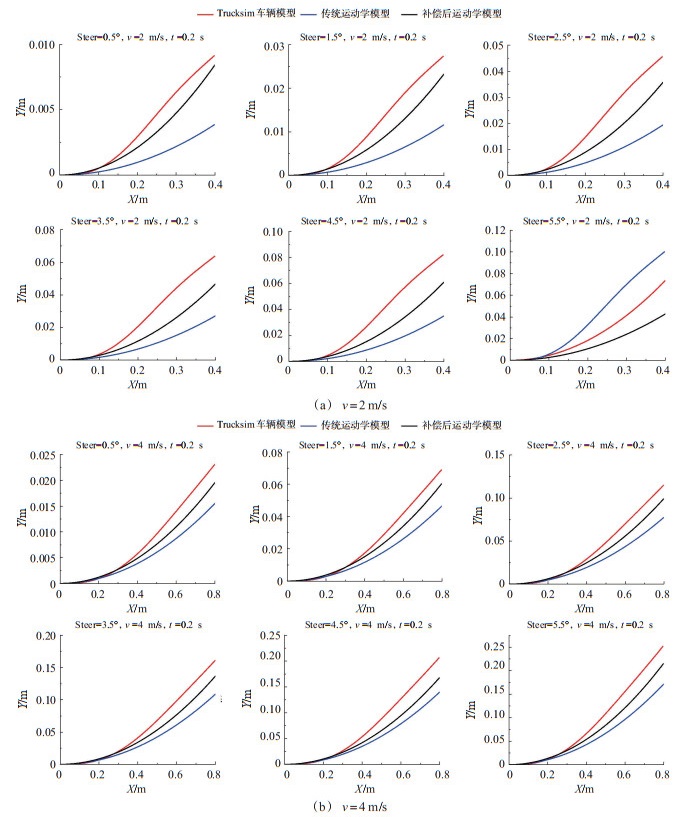
图 5 补偿后运动学模型与Trucksim车辆模型在初始0.2 s内铰接点的轨迹比较
Figure 5. A comparison of the trajectories of the hinge points between the compensated kinematic model and the Trucksim vehicle model within the initial 0.2 seconds

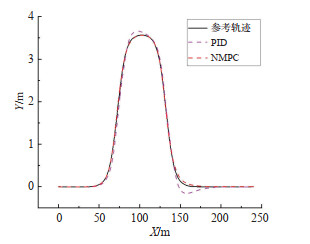
图 8 不同控制器下牵引车-飞机系统的轨迹跟踪对比
Figure 8. Trajectory tracking comparison of tractor-aircraft systems under different controllers

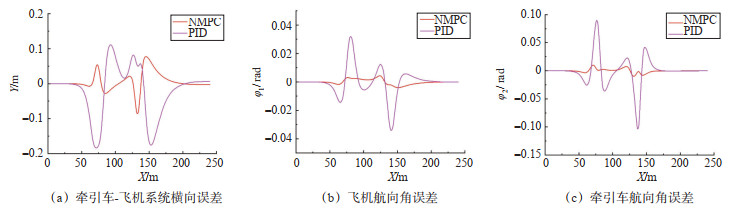
图 9 不同控制器下牵引车-飞机系统轨迹跟踪误差结果
Figure 9. Trajectory tracking error results of the tractor-aircraft system under different controllers

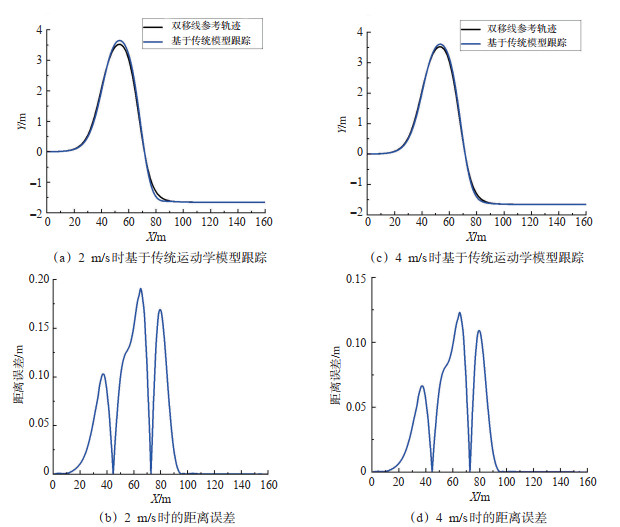
图 10 基于传统运动学模型控制器的轨迹跟踪和距离误差结果
Figure 10. Trajectory tracking and distance error results based on the traditional kinematic model controller

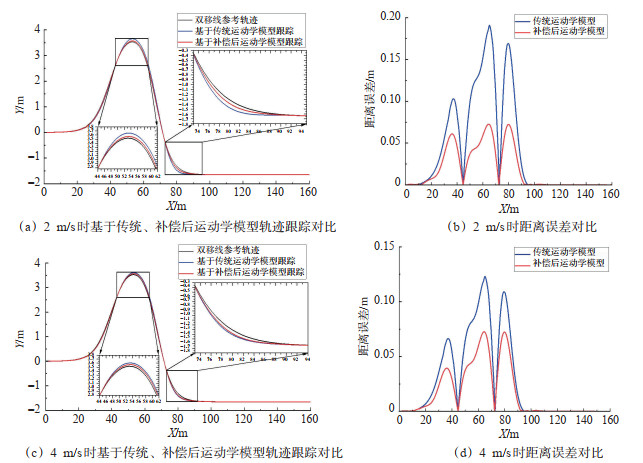
图 11 基于传统、补偿后运动学模型控制器的轨迹跟踪和距离误差结果
Figure 11. Trajectory tracking and distance error results based on the traditional, compensated kinematic model controller

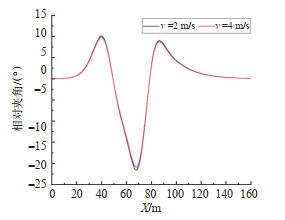
图 12 飞机与牵引车的相对夹角变化结果
Figure 12. The change of the relativeAngle between the aircraft and the tractor

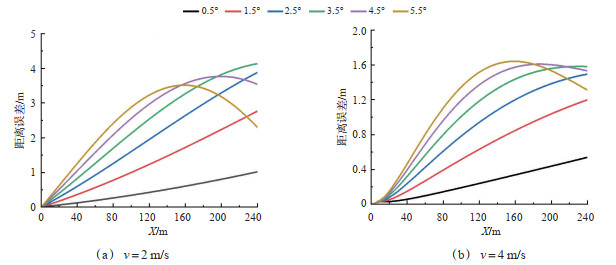
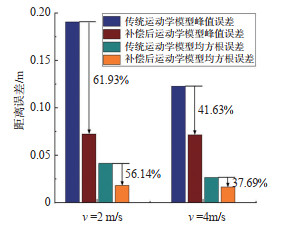
图 13 不同速度下2种运动学仿真模型的轨迹跟踪误差对比
Figure 13. Comparison of trajectory tracking errors of two kinematic simulation models at different speeds

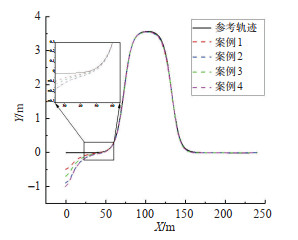
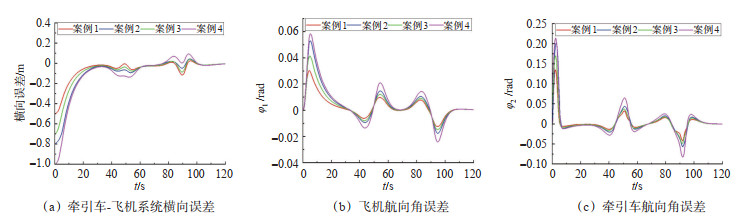
图 14 不同初始偏差下牵引车-飞机系统的轨迹跟踪对比
Figure 14. Trajectory tracking comparison of tractor-aircraft systems under different initial deviations

图 15 不同初始偏差下牵引车-飞机系统轨迹跟踪误差结果
Figure 15. The trajectory tracking error results of the tractor-aircraft system under different initial deviations
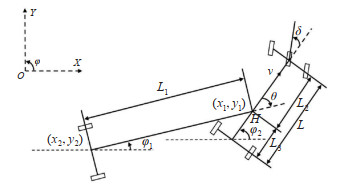
表 1 牵引车-飞机系统参数
Table 1. Tractor-Aircraft system parameters
参数/m 数值 AM210牵引车轴距L 4.5 B737-800飞机轴距L1 15.6 牵引车前轴几何中心与铰接点距离L2 2.96 牵引车后轴几何中心与铰接点距离L3 1.54  下载: 导出CSV
下载: 导出CSV
表 2 控制器参数
Table 2. Controller parameter
参数 值 T/ms 50 NP 15 Nc 2 Q Diag{100, 100, 100, 50} R Diag{50, 50}
下载: 导出CSV
表 3 均方根误差值
Table 3. Root mean square error value(RMSE)
控制器 横向误差/m 飞机航向角误差/rad 牵引车航向角误差/rad NMPC 0.041 5 0.001 9 0.003 9 PID 0.092 4 0.012 7 0.032 7
下载: 导出CSV
表 4 不同速度下2种控制器仿真模型的峰值跟踪误差和均方根跟踪误差
Table 4. The peak tracking error and root mean square tracking error of the two controller simulation models at different speeds
速度/(m/s) 运动学模型 峰值误差/m 均方根误差/m 2 传统模型 0.190 7 0.041 5 2 补偿后模型 0.072 6 0.018 2 4 传统模型 0.123 0 0.026 8 4 补偿后模型 0.071 8 0.016 7
下载: 导出CSV
表 5 不同初始偏差参数
Table 5. Different initial deviation parameters
序号 $\Delta x_{1} / \mathrm{m}$ $\Delta y_{1} / \mathrm{m}$ $\Delta \varphi_{1} / \mathrm{rad}$ $\Delta \varphi_{2} / \mathrm{rad}$ 案例1 -0.5 -0.5 0 0 案例2 -0.6 -0.8 0 0 案例3 -0.7 -0.7 0 0.05 案例4 -1 -1 0 0.1
下载: 导出CSV
-
[1] 宁文祥. 德国Goldhofer公司的现代化飞机牵引车[J]. 专用汽车, 2011(11): 47-49.NING W X. Modern aircraft tractor of Goldhofer Company in Germany[J]. Special Purpose Vehicle, 2011, (11): 47-49. (in Chinese) [2] 李跃明, 李晓云, 柴怡君, 等. 飞机新牵引滑出方式下前起落架动响应分析[J]. 航空学报, 2022, 43(6): 214-227.LI Y M, LI X Y, CHAI Y J, et al. Dynamic response analysis of the nose landing gear in aircraft new towing taxi mode[J]. Acta Aeronautica et Astronautica Sinica, 2022, 43(6): 214-227. (in Chinese) [3] 刘洁, 韩维, 徐卫国, 等. 基于滚动时域的舰载机甲板运动轨迹跟踪最优控制[J]. 航空学报, 2019, 40(8): 175-200.LIU J, HAN W, XU W G, et al. Optimal path tracking control of carrier-based aircraft on the deck based on RHC[J]. Acta Aeronautica ET Astronautica Sinica, 2019, 40(8): 175-200. (in Chinese) [4] 刘洁, 董献洲, 韩维, 等. 采用牛顿迭代保辛伪谱算法的舰载机甲板路径规划[J]. 浙江大学学报(工学版), 2020, 54 (9): 1827-1838.LIU J, DONG X Z, HAN W, et al. Trajectory planning for carrier aircraft on deck using Newton Symplectic Pseudo-spectral method[J]. Journal of Zhejiang University(Engineering Science), 2020, 54(9): 1827-1838. (in Chinese) [5] 董健康, 王洁宁, 王安国, 等. 飞机推出和跑道掉头滑行行为计算方法[J]. 航空学报, 2012, 33(12): 2183-2191.DONG J K, WANG J N, WANG A G, et al. Aircraft behavior simulation investigation during pushback and U-turn maneu vers[J]. Acta Aeronautica et Astronautica Sinica, 2012, 33 (12): 2183-2191. (in Chinese) [6] 于鸿彬, 赵嘉伟. 飞机在牵引转弯工况下的运动轨迹仿真与分析[J]. 科学技术与工程, 2023, 23(4): 1760-1765.YU H B, ZHAO J W. Simulation and analysis of motion trajectory of aircraft in traction turning condition[J]. Science Technology and Engineering, 2023, 23(4): 1760-1765. (in Chinese) [7] 王能建, 杨万辉, 周丽杰. 无杆飞机牵引车顶推作业仿真研究[J]. 机械设计, 2011, 28(9): 17-20.WANG N J, YANG W H, ZHOU L J. Simulation research on pushback of towbarless aircraft tractor[J]. Journal of mechanical design, 2011, 28(9): 17-20. (in Chinese) [8] 解本铭, 赵宏伟, 王伟, 等. 遥控无杆飞机牵引车牵引转弯的运动学研究[J]. 机械设计与制造, 2018, (7): 127-129.XIE B M, ZHAO H W, WANG W, et al. Kinematics research on towing turning of remote control towbarless aircraft tractor[J]. Journal of mechanical design and manufacturing, 2018, (7): 127-129. (in Chinese) [9] LEE J, CHUNG W, KIM M, et al. A passive multiple trailer system with off-axle hitching[J]. International Journal of Control Automation and Systems, 2004, 2(3): 289-297. [10] 鲁鑫, 孙宇宁, 唐杰, 等. 考虑机轮形变的车辆-飞机牵引滑出系统运动学特性分析[J]. 北京航空航天大学学报, 2025, 51(2): 478-486.LU X, SUN Y N, TANG J, et al. Kinematic characteristics analysis of vehicle-aircraft towing taxi system considering wheel deformation[J]. Journal of Beijing University of Aeronautics and Astronautics, 2025, 51(2): 478-486. (in Chinese) [11] Ahn J, Shin S, Kim M, et al. Accurate path tracking by adjusting look-ahead point in pure pursuit method[J]. International Journal of Automotive Technology, 2021, 22(1): 119-129. doi: 10.1007/s12239-021-0013-7 [12] 杨腾盛, 郭世永. 基于自适应预瞄前馈控制的智能车辆路径跟踪研究[J]. 青岛理工大学学报, 2022, 43(5): 136-142.YANG T S, GUO S Y. Research on path tracking of intelligent vehicles based on adaptive preview feedforward control[J]. Journal of Qingdao University of Technology, 2022, 43(5): 136-142. (in Chinese) [13] CHENG S, LI L, CHEN X, et al. Model-predictive-control-based path tracking controller of autonomous vehicle considering parametric uncertainties and velocity-varying[J]. IEEE Transactions on Industrial Electronics, 2020, 68(9): 8698-8707. [14] 张攀, 柳阳, 刘新杰, 等. 改进的智能飞机牵引车路径导航纯追踪算法[J]. 计算机工程, 2019, 45(5): 267-271.ZHANG P, LIU Y, LIU X J, et al. Improved pure pursuit algorithm for intelligent aircraft tractor path navigation[J]. Computer Engineering, 2019, 45(5): 267-271. (in Chinese) [15] LIU J, HAN W, PENG H J, et al. Trajectory planning and tracking control for towed carrier aircraft system[J]. Aerospace Science and Technology, 2019, 8(4): 830-838. [16] 陈亮, 秦兆博, 孔伟伟, 等. 基于最优前轮侧偏力的智能汽车LQR横向控制[J]. 清华大学学报(自然科学版), 2021, 61(9): 906-912.CHEN L, QIN Z B, KONG W W, et al. Lateral control using LQR for intelligent vehicles based on the optimal front-tire lateral force[J]. Tsinghua University Journal(Natural Science Edition), 2021, 61(9): 906-912. (in Chinese) [17] 高琳琳, 唐风敏, 郭蓬, 等. 自动驾驶横向运动控制的改进LQR方法研究[J]. 机械科学与技术, 2021, 40(3): 435-441.GAO L L, TANG F M, GUO P, et al. Research on Improved LQR Method for self-driving[J]. Mechanical Science and Technology for Aerospace Engineering, 2021, 40(3): 435-441. (in Chinese) [18] BACKMAN J, OKSANEN T, VISALA A, et al. Navigation system for agricultural machines: Nonlinear Model Predictive path tracking[J]. Computers and electronics in agriculture, 2012, 8(2): 32-43. [19] KARKEE M, STEWARD B L. Study of the open and closed loop characteristics of a tractor and a single axle towed implement system[J]. Journal of Terramechanics. 2010, 47(6): 379-393. doi: 10.1016/j.jterra.2010.05.005 [20] 韩陌, 何洪文, 石曼, 等. 基于学习的无人驾驶车辆模型预测路径跟踪控制研究[J]. 汽车工程, 2024, 46(7): 1197-1207.HAN M, HE H W, SHI M, et al. Research on learning-based model predictive path tracking control for autonomous vehicles[J]. Automotive Engineering, 2024, 46(7): 1197-1207. (in Chinese) [21] OYELERE S S. The application of model predictive control (MPC)to fast systems such as autonomous ground vehicles (AGV)[J]. The International organization of Scientific Research(IOSR)Journal of Computer Engineering, 2014, 3 (3): 27-37. [22] 中国民用航空局. 民用机场飞行区技术标准: MH 5001-2021[S]. 北京: 中国民用航空局机场司, 2021.Civil Aviation Administration of China. Aerodrome technical standards: MH 5001-2021[S]. Beijing: Department of Airport, CAAC, 2021. (in Chinese) -

 点击查看大图
点击查看大图
计量
- 文章访问数: 7
- HTML全文浏览量: 7
- PDF下载量: 3
- 被引次数: 0