

A Cooperative Control Method for Signal and Vehicles at Intersections Considering Pedestrian Crossing Safety
-
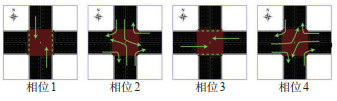
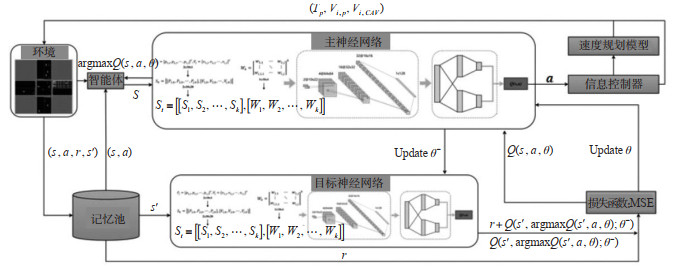
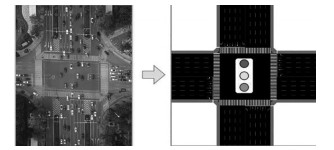
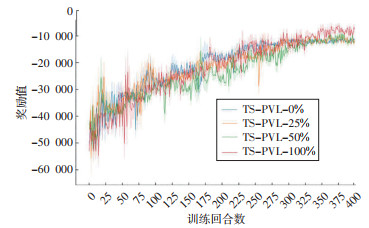
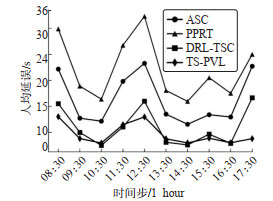
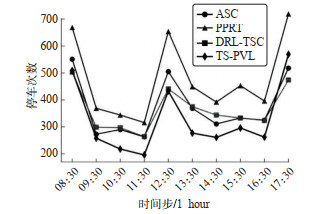
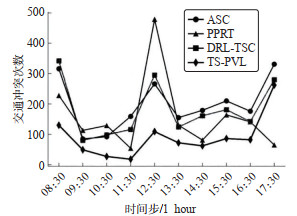
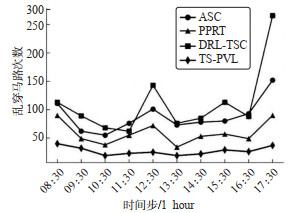
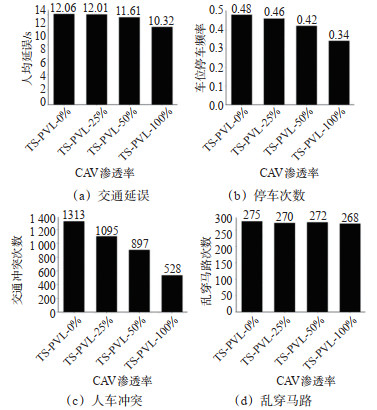
摘要: 针对混合交通下信号交叉口闯行行多、人车冲突风险高且拥堵延误大的问题,研究了信号灯、智能网联汽车(connected autonomous vehicle,CAV)和行人的协同控制方法。第一阶段,结合保护/禁止右转(protect/prohibit right turning,PPRT)策略,构建面向行人安全的深度强化学习信控框架。状态以车辆与行人的位置和速度矩阵表示,刻画路口的时空态势。动作按行人直行与车辆左/右转拆分相位,以信号层面的时空分离抑制主要人车冲突。奖励采用等待时间差,考虑载客量对效率的影响,并以决斗双重深度Q网络算法求解最优策略。第二阶段,建立行人与CAV的速度规划模型,减少人车交互并降低延误。行人侧根据过街距离与绿灯余长计算可行速度区间,并受加速度与速度约束,考虑人群的服从度与随机扰动。CAV侧在高风险场景时,调整满足安全约束的速度水平,削减冲突发生条件。对左转与直行的CAV进行速度引导,使其平滑通过路口。基于长沙市交叉口场景和交通流数据,构建智能网联交叉口和混合交通场景,在城市交通流仿真工具(simulation of urban mobility,SUMO)进行仿真实验。结果表明,在50% CAV渗透率场景下,本文方法的人车冲突和闯行分别为897次和272次,较PPRT分别降低43.37%和53.7%。人均延误11.61 s,较感应式信号控制、PPRT、深度强化学习信号控制分别减少39.15%、55.03%、13.62%,停车次数降至3 279次。优化效果随CAV渗透率的增加而提升,在0%~25%时,冲突减少16.60%,升至100%时综合指标最优。Abstract: Addressing frequent jaywalking, pedestrian-vehicle conflict risk, and heavy congestion at signalized intersections under mixed traffic, this study develops a cooperative control framework for traffic signals, connected autonomous vehicle (CAV), and pedestrians. In Stage 1, a protect/prohibit right-turning (PPRT) strategy is integrated into a pedestrian-oriented deep reinforcement learning (DRL) controller. The state encodes spatial-temporal conditions using matrices of vehicle and pedestrian positions and speeds. Actions split phases into pedestrian-through and vehicle left/right turns to achieve temporal-spatial separation of key conflicts. The reward is based on the difference in cumulative waiting time with passenger-load weighting to reflect social efficiency, and the optimal policy is learned with a dueling double deep Q-network. In Stage 2, coordinated speed planning for pedestrians and CAV is designed to further reduce interactions and delay. Pedestrian speeds are bounded by feasible ranges derived from crossing distance and remaining green time with acceleration and speed constraints and with compliance and stochastic perturbations considered. CAV adjust to safety-feasible speeds when high-risk situations are detected and receive speed guidance for left-turn and through movements to pass the intersection smoothly. Using a Changsha intersection and local traffic data, an intelligent connected intersection and mixed-traffic scenario and implement simulations are built in SUMO. Results show that the proposed method yields 897 pedestrian-vehicle conflicts and 272 jaywalking events at 50% CAV penetration, reductions of 43.37% and 53.7% compared with PPRT. Average per-capita delay is 11.61 s, which is 39.15%, 55.03%, and 13.62% lower than actuated control, PPRT, and DRL-based signal control, and the number of stops decreases to 3 279. Performance improves with higher CAV penetration, with conflicts reduced by 16.60% from 0% to 25%, and overall metrics reaching the best level at 100%.
-
表 1 混合交通参数
Table 1. The mixed traffic parameters
模型参数 CAV HV 车辆长度/m 4.8 4.5 车辆宽度/m 1.8 1.8 跟驰模型 CACC Krass 最小间距/m 1.5 2.5 初始速度/(km/h) 20 20 最大速度/(km/h) 60 60 最大加速度/(m/s2) 2.5 1.0 最大减速度/(m/s2) 5.0 3.5 Sigma 0.1 0.5 换道模型 LC2013 LC2013 Lc-strategic 1.6 1.0 Lc-cooperative 1.0 1.0 Lc-speedgain 1.6 1.0 Lc-keepright 1.8 1.0 Lc-opposite 1.0 1.0 Lc-lookaheadleft 2.5 2.0 Lc-speedgainright 0.1 0.1 Lc-assertive 1.0 1.0  下载: 导出CSV
下载: 导出CSV
表 2 算法参数设置
Table 2. Algorithm setting
参数 取值 动作Na 4 行人奖励权重wp 1 车辆奖励权重wv 2 批处理大小B 65 学习率Lr 0.000 5 单次训练E 400 初始ε 0.8 末端ε 0.01 记忆池最小值Mmin 60 记忆池最大值Mmax 80 000 折扣因子γ 1.99 训练步长ttrain 1 s 软更新参数β 0.001
下载: 导出CSV
表 3 交通信号控制方法对比
Table 3. Comparison of traffic signal control methods
信控方法 平均车辆延误/s 平均行人延误/s 人均延误/s 交通冲突次数 乱穿马路次数 ASC 19.56 18.27 19.08 1 969 881 PPRT 29.26 20.06 25.82 1584 587 DRL-TSC 13.51 13.32 13.44 1 819 1 103 TS-PVL 14.2 7.28 11.61 897 272
下载: 导出CSV
-
[1] RAONIAR R, SINGH S, PATHAK A, et al. Analysis of pedestrian-vehicle interaction dynamics at signalized urban intersections: a surrogate safety measure approach[J]. Transportation Research Record, 2025, 2679(4): 1042-1063. [2] FENG M, ZHAO J, HOU C, et al. Investigating the safety influence path of right-turn configurations on vehicle-pedestrian conflict risk at signalized intersections[J]. Accident Analysis & Prevention, 2025, 211: 107910. [3] CHEN L, ENGLUND C. Cooperative intersection management: a survey[J]. IEEE Transactions on Intelligent Transportation Systems, 2016, 17(2): 570-586. doi: 10.1109/TITS.2015.2471812 [4] HALEEM K, ALLURI P, GAN A. Analyzing pedestrian crash injury severity at signalized and non-signalized locations[J]. Accident Analysis & Prevention, 2015, 81: 14-23. [5] 王长帅, 邵永成, 朱彤, 等. 城市道路中间路段人车冲突中网联预警信息对驾驶行为的影响[J]. 交通信息与安全, 2024, 42 (4): 81-89. doi: 10.3963/j.jssn.1674-4861.2024.04.009WANG C S, SHAO Y C, ZHU T. Impacts of connected warning information on driver behavior in pedestrian-vehicle conflict at the mid-block of urban roads[J]. Journal of Transport Information and Safety, 2024, 42(4): 81-89. doi: 10.3963/j.jssn.1674-4861.2024.04.009 [6] FURTH P, KOONCE P, MIAO Y, et al. Mitigating right-turn conflict with protected yet concurrent phasing for cycle track and pedestrian crossings[J]. Transportation Research Record, 2014, 2438(1): 81-88. doi: 10.3141/2438-09 [7] HOWLADER M M, YASMIN S, BHASKAR A, et al. A before-after evaluation of protected right-turn signal phasings by applying empirical bayes and full bayes approaches with heterogenous count data models[J]. Accident Analysis & Prevention, 2023, 179: 106882. [8] HOWLADER M M, ALI Y, BURBRIDGE A, et al. Before-after safety evaluation of part-time protected right-turn signals: an extreme value theory approach by applying artificial intelligence-based video analytics[J]. Accident Analysis & Prevention, 2024, 194: 107341. [9] ABADI M G, HURWITZ D. Operational Impacts of protected-permitted right-turn phasing and pavement markings on bicyclist performance during conflicts with right-turning vehicles[J]. Transportation Research Record, 2019, 2673(4): 789-799. [10] ZAFRI N M, RONY A I, ADRI N. Study on pedestrian compliance behavior at vehicular traffic signals and traffic-police-controlled intersections[J]. International Journal of Intelligent Transportation Systems Research, 2020, 18(3): 400-411. [11] WANG A Y, ZHANG K, LI M, et al. Game theory-based signal control considering both pedestrians and vehicles in connected environment[J]. Sensors, 2023, 23(23): 9438. [12] XU K J, HUANG J Q, KONG L H, et al. PV-TSC: learning to control traffic signals for pedestrian and vehicle traffic in 6g era[J]. IEEE Transactions on Intelligent Transportation Systems, 2023, 24(7): 7552-7563. [13] YAZDANI M, SARVI M, BAGLOEE S A, et al. Intelligent vehicle pedestrian light(IVPL): a deep reinforcement learning approach for traffic signal control[J]. Transportation Research Part C: Emerging Technologies, 2023, 149: 103991. [14] AREL I, LIU C, URBANIK T, et al. Reinforcement learning-based multi-agent system for network traffic signal control[J]. IET Intelligent Transport Systems, 2010, 4(2): 128-135. [15] DUCROCQ R, FARHI N. Deep reinforcement q-learning for intelligent traffic signal control with partial detection[J]. International Journal of Intelligent Transportation Systems Research, 2023, 23(1): 192-206. [16] ULLAH Z, AI-TURJMAN F, MOSTARD L, et al. Applications of artificial intelligence and machine learning in smart cities[J]. Computer Communications, 2020, 154: 313-323. [17] 姚志洪, 金玉婷, 王思琛, 等. 混入智能网联汽车的交通流稳定性与安全性分析[J]. 中国安全科学学报, 2021, 31(10): 136-143.YAO Z H, JIN Y T, WANG S C, et al. Analysis of traffic flow stability and safety with the introduction of intelligent connected vehicles[J]. China Safety Science Journal, 2021, 31(10): 136-143. [18] 张名芳, 马艳华, 马勇. 无信号交叉口人车冲突严重程度影响因素分析[J]. 中国安全科学学报, 2023, 33(8): 190-197.ZHANG M F, MA Y H, MA Y. Analysis of factors influencing the severity of pedestrian-vehicle conflicts at unsignalized intersections[J]. China Safety Science Journal, 2023, 33 (8): 190-197. [19] 张功权, 常方蓉, 金杰灵, 等. 安全驱动的城市交叉口自适应信号控制方法[J]. 中国安全生产科学技术, 2023, 19(10): 192-199.ZHANG G Q, CHANG F L, JIN J L, et al. Safety-driven adaptive signal control method for urban intersections[J]. Journal of Safety Science and Technology, 2023, 19(10): 192-199. [20] SHI Y Y, LIU Z K, WANG Z H, et al. An integrated traffic and vehicle co-simulation testing framework for connected and autonomous vehicles[J]. IEEE Intelligent Transportation Systems Magazine, 2022, 14(6): 26-40. [21] ZHOU Z P, ZHOU Y, PU Z Y, et al. Simulation of pedestrian behavior during the flashing green signal using a modified social force model[J]. Transportmetrica A: Transport Science, 2019, 15(2): 1019-1040. [22] ZHANG G Q, CHANG F L, JIN J L, et al. Multi-objective deep reinforcement learning approach for adaptive traffic signal control system with concurrent optimization of safety, efficiency, and decarbonization at intersections[J]. Accident Analysis & Prevention, 2024, 199: 107451. [23] 汤天培, 袁泉, 袁美宁, 等. 人非混行状态下行人心理边界的影响因素分析[J]. 交通信息与安全, 2024, 42(4): 136-143. doi: 10.3963/j.jssn.1674-4861.2024.04.015TANG T P, YUAN Q, YUAN M N, et al. Determinants of pedestrians' psychological boundary in the coexistence of pedestrian and non-motorized vehicles[J]. Journal of Transport Information and Safety, 2024, 42(4): 136-143. doi: 10.3963/j.jssn.1674-4861.2024.04.015 [24] NIROUMAND R, LEILA H, ALI H. Advancing the white phase mobile traffic control paradigm to consider pedestrians[J]. Computer-Aided Civil and Infrastructure Engineering, 2024, 39(13): 1946-1962. frastructureEngineering, 2024, 39 (13): 1946-1962. -

 点击查看大图
点击查看大图
图(10) / 表(3)
计量
- 文章访问数: 18
- HTML全文浏览量: 5
- PDF下载量: 3
- 被引次数: 0