

A Reliability Design of Circular Curve Radius of Highway Under Mixed Traffic Flow
-
摘要: 针对自动驾驶汽车(autonomous vehicles,AVs)与人工驾驶车辆(human-drive vehicles,HDVs)组成的混合交通流在高速公路圆曲线路段因路侧设施遮挡等原因导致的停车视距不足问题,以及传统确定性方法计算模型的局限性,研究保障混合交通流视距安全的高速公路最小圆曲线半径。基于防抱死制动系统(anti-lock braking system,ABS)制动过程、横净距法,将汽车制动过程分为3个阶段,并考虑不同偏向、不同车道的有效视距,分别建立停车视距和有效视距计算模型,量化最不利情况的视距需求与供给。基于可靠度理论,考虑不同的AVs渗透率,以及驾驶人或自动驾驶系统在运行速度和制动反应时间上的随机性,使用不确定性的方法建立圆曲线半径对应的停车视距可靠性计算模型,计算《公路路线设计规范》中圆曲线一般最小半径(以下简称规范值)的停车视距可靠概率。使用95%作为目标可靠概率,提出满足视距安全的最小圆曲线半径推荐值和不同圆曲线半径下的安全车速推荐值,通过SUMO仿真验证推荐值的合理性。结果表明:AVs渗透率为0%、圆曲线半径取规范值时左偏最内侧车道的可靠概率均小于95%;随着AVs渗透率增大,可靠概率随之增大;AVs渗透率越高,满足停车视距可靠性要求的最小圆曲线半径越小、安全车速越高;与规范值相比,采用推荐值时仿真试验的交通冲突率平均降低了71.1%、交通流功率平均提高了27.3%,且进一步增大圆曲线半径无显著效益。Abstract: The insufficiency of stopping sight distance (SSD) on highway curves due to roadside obstructions is a critical issue for mixed traffic flow composed of autonomous vehicles (AVs) and human-drive vehicles (HDVs). Traditional deterministic models for addressing this have limitations. Therefore, the minimum circular curve radius ensuring sight distance safety for this mixed traffic flow is investigated. The vehicle braking process is modeled in three stages, incorporating anti-lock braking system (ABS) and the lateral clearance method. Calculation models for SSD and available sight distance (ASD) are developed for various lanes and curve directions. This quantifies sight distance supply and demand under the most critical conditions. A reliability-based model is developed to assess sight distance for given curve radii. This model accounts for random variations in operating speed and braking reaction time of both drivers and autonomous systems, across different AVs penetration rates. The probability of SSD for the general minimum radius specified in the Design Specification for Highway Alignment (hereinafter referred to as standard values) is calculated. Using 95% as the target reliability probability, the recommended values for the minimum radius of circular curves and corresponding safe speed limits under various radii scenarios are proposed. The rationality of these recommended values is verified through SUMO simulations. Results indicate that when the AVs penetration rate is 0%, the reliability probability for the innermost lane of left-turning curves is lower than 95% when using the standard values. Higher AVs penetration increases the reliability probability, allowing for smaller minimum curve radii and higher safe speeds. SUMO simulations verify that the recommended values reduce traffic conflicts by 71.1% and improve traffic efficiency by 27.3% on average, compared to the standard values. Further increasing the curve radius provides no significant benefit.
-

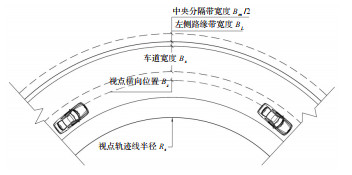
图 3 右偏圆曲线横净距法计算模型示意图
Figure 3. Schematic diagram of calculation model of right-turning circular curve with horizontal clear distance method

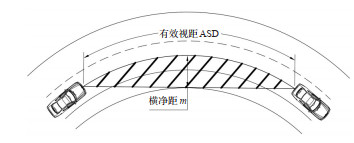
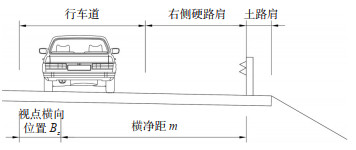
图 4 右偏圆曲线横净距示意图
Figure 4. Schematic diagram of horizontal clear distance for the right-turning circular curve

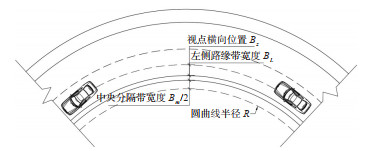
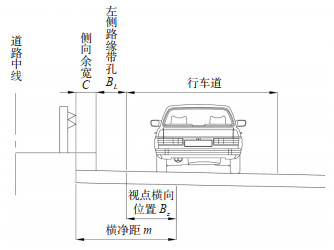
图 5 左偏圆曲线横净距法计算模型示意图
Figure 5. Schematic diagram of calculation model of left-turning circular curve with horizontal clear distance method

图 6 左偏圆曲线横净距示意图
Figure 6. Schematic diagram of horizontal clear distance for the left-turning circular curve

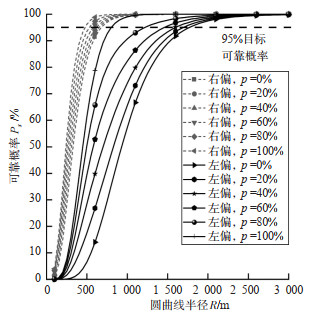
图 7 双向4车道设计速度100 km/h下可靠概率分布曲线
Figure 7. Probability distribution curve for two-way four-lane design speed of 100 km/h

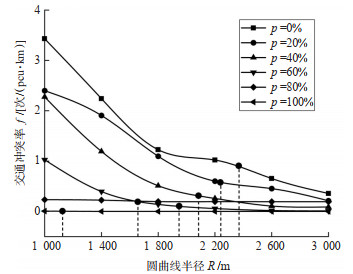
图 9 不同渗透率、不同圆曲线半径下的交通冲突率
Figure 9. Traffic conflict rate under different penetration rates and radius of circular curve

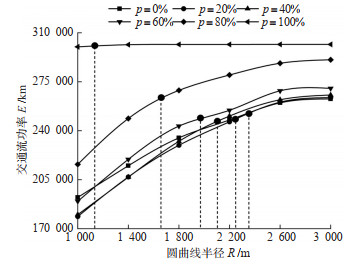
图 10 不同渗透率、不同圆曲线半径下的交通流功率
Figure 10. Traffic flow efficiency under different penetration rates and radius of circular curve
表 1 圆曲线路段线形设计值
Table 1. The design value of circular curve alignment
设计参数 线形设计值 设计速度Vd /(km/h) 120 100 80 圆曲线一般最小半径R / m 1 000 700 400 中央分隔带宽度Bm / m 3.0 2.0 2.0 左侧路缘带宽度BL / m 0.75 0.75 0.5 车道宽度BX / m 3.75 3.75 3.75 右侧硬路肩宽度BR / m 3.0 3.0 3.0 侧向余宽C / m 0.5 0.25 0.25  下载: 导出CSV
下载: 导出CSV
表 2 自由流速度K-S检验结果
Table 2. K-S test results of vehicle speed
检验参数 检验结果 双向4车道 双向6车道 Vd /(km/h) 120 100 80 120 100 80 速度采集路段 G4 S1 S18 G0422 S7 S19 样本量 752 683 430 769 604 486 最内侧车道/(km/h) 均值 108.64 93.84 78.46 113.10 92.49 75.91 标准差 9.87 9.44 9.18 9.20 10.17 9.13 精确显著性水平(双侧) 0.897 0.834 0.751 0.860 0.599 0.770 样本量 683 658 468 702 529 398 最外侧车道/(km/h) 均值 101.45 89.21 72.39 105.38 87.30 71.74 标准差 10.49 11.49 11.93 10.69 12.42 10.38 精确显著性水平(双侧) 0.573 0.761 0.850 0.676 0.751 0.649
下载: 导出CSV
表 3 可靠概率计算结果
Table 3. Results of probability
Vd /(km/h) 规范值/m p /% 可靠概率/% 双向4车道 双向6车道 右偏最外侧车道 左偏最内侧车道 右偏最外侧车道 左偏最内侧车道 120 1 000 0 98.02 25.83 96.04 26.99 20 98.37 38.89 96.89 39.39 40 98.83 51.55 97.49 52.91 60 99.21 64.18 98.24 65.95 80 99.54 77.09 99.02 79.14 100 99.96 89.98 99.75 92.00 100 700 0 97.17 30.03 97.37 35.06 20 97.79 42.06 97.86 46.61 40 98.34 55.02 98.32 58.13 60 98.81 67.67 98.84 69.68 80 99.32 80.00 99.32 81.30 100 99.83 92.46 99.81 93.12 80 400 0 96.53 26.38 97.85 33.48 20 97.17 38.44 98.25 45.33 40 97.84 50.98 98.73 57.66 60 98.50 63.36 99.08 69.48 80 99.12 76.01 99.47 81.50 100 99.73 88.14 99.93 93.79
下载: 导出CSV
表 4 最小圆曲线半径推荐值
Table 4. Recommended minimum radius of circular curves
Vd /(km/h) 规范值/m p /% 圆曲线最小半径推荐值/m 双向4车道 双向6车道 120 1 000 0 2 320 2 230 20 2 220 2 140 40 2 100 2 030 60 1 930 1 860 80 1 640 1 580 100 1 120 1 070 100 700 0 1 660 1 650 20 1 600 1 570 40 1 490 1 470 60 1 360 1 330 80 1 140 1 110 100 750 740 80 400 0 1 150 1 020 20 1 100 970 40 1 030 920 60 930 820 80 760 670 100 470 410
下载: 导出CSV
表 5 安全车速推荐值(左偏圆曲线最内侧车道)
Table 5. Recommended safe speed (innermost lane of left curve)
Vd /(km/h) 规范值/m p /% 安全车速推荐值/(km/h) 双向4车道 双向6车道 120 1 000 0 89 88 20 90 89 40 91 91 60 93 93 80 98 96 100 117 118 100 700 0 76 77 20 77 77 40 78 78 60 82 81 80 84 84 100 100 100 80 400 0 60 60 20 62 61 40 63 64 60 64 65 80 67 68 100 80 80
下载: 导出CSV
-
[1] 庞松. 科学推动自动驾驶技术发展与应用——拥抱新技术, 迎接新挑战[J]. 重庆交通大学学报(自然科学版), 2021, 40(10): 119-122.PANG S. Scientifical promotion of the development and application of automatic driving technologies and meet new challenges[J]. Journal of Chongqing Jiaotong University(Natural Science), 2021, 40(10): 119-122. (in Chinese) [2] 王雪松, 覃定明, 叶欣辰, 等. 面向自动驾驶的道路适驾性研究进展[J]. 中国公路学报, 2024, 37(1): 175-193.WANG X S, QIN D M, YE X C, et al. Recent developments on road readiness for automated driving[J]. China Journal of Highway and Transport, 2024, 37(1): 175-193. (in Chinese) [3] 中华人民共和国交通运输部. 公路路线设计规范: JTG D20-2017[S]. 北京: 人民交通出版社, 2017.Ministry of Transport of the People's Republic of China. Design specifications for highway alignment: JTG D20-2017[S]. Beijing: People's Communications Press, 2017. (in Chinese) [4] ZHAO Y F, YING X Z, LI J R. Research on Geometric design standards for freeways under a fully autonomous driving environment[J]. Applied Sciences, 2022, 12: 7109. doi: 10.3390/app12147109 [5] YE X C, WANG X S. Operational design domain of automated vehicles at freeway entrance terminals[J]. Accident Analysis & Prevention, 2022, 174: 106776. [6] WANG S Y, MA Y, LIU J Z, et al. Readiness of as-built horizontal curved roads for LiDAR-based automated vehicles: a virtual simulation analysis[J]. Accident Analysis & Prevention, 2022, 174: 106762. [7] WANG S Y, MAO C Y, MA Y, et al. Examining the feasibility of current spiral curve design controls for LiDAR-based automated vehicles[J]. IET Intelligent Transport Systems, 2023, 17(5): 848-866. doi: 10.1049/itr2.12310 [8] AL-SHEIKH O, GHASEMI S H, JALAYER M. Reliability-based analysis of horizontal curve design by evaluating the impact of vehicle automation on roadway departure crashes and safety performance[J]. Heliyon, 2024, 10(4): e25346. doi: 10.1016/j.heliyon.2024.e25346 [9] SHALKAMY A, GARGOUM S, EL-BASYOUNY K. Towards a more inclusive and safe design of horizontal curves: exploring the association between curve features, reliability measures, and safety[J]. Accident Analysis & Prevention, 2021, 153: 106009. [10] ALSALEH R, LANZARO G, SAYED T. Incorporating design consistency into risk-based geometric design of horizontal curves: a reliability-based optimization framework[J]. Transport Metrica A: Transport Science, 2024, 20(2): 2174356. doi: 10.1080/23249935.2023.2174356 [11] 盛旭高, 于梦阁, 霍炜. 基于停车视距的强降雨环境下公路车辆制动安全可靠性研究[J]. 公路交通科技, 2023, 40 (1): 227-235.SHENG X G, YU M G, HUO W. Study on braking safety reliability of highway vehicles in heavy rainfall environment based on stopping sight distance[J]. Journal of Highway and Transportation Research and Development, 2023, 40(1): 227-235. (in Chinese) [12] 张航, 张肖磊, 吕能超. 高速公路停车视距可靠性设计[J]. 公路交通科技, 2019, 36(4): 44-49, 87.ZHANG H, ZHANG X L, LYU N C. Reliability design for stopping sight distance of expressway[J]. Journal of Highway and Transportation Research and Development, 2019, 36 (4): 44-49, 87. (in Chinese) [13] 沈国松. 异质交通流下高速公路主线连续入口间距研究[D]. 武汉: 武汉理工大学, 2024.SHEN G S. Research on distance of the continuous entrance of highway mainline under heterogenerous traffic flow environment[D]. Wuhan: Wuhan University of Technology, 2024. (in Chinese) [14] 单慧敏. 多车道高速公路停车视距研究[D]. 西安: 长安大学, 2020.SHAN H M. Research on stopping sight distance of multi-lane expressway[D]. Xi'an: Chang'an University, 2020. (in Chinese) [15] 张航, 熊宇豪, 吕能超. 基于停车视距的高速公路下坡段货车制动可靠性[J/OL]. 吉林大学学报(工学版), 1-9[2025-02-22]. https://doi.org/10.13229/j.cnki.jdxbgxb.20240764 .ZHANG H, XIONG Y H, LYU N C. Reliability of truck braking on downhill sections of highways based on stopping sight distance[J/OL]. Journal of Jilin University(Engineering and Technology Edition), 1-9[2025-02-22].https://doi.org/10.13229/j.cnki.jdxbgxb.20240764 . (in Chinese)[16] 潘兵宏, 赵悦彤, 温长鹏, 等. 基于驾驶人视觉特性和停车视距的公路平面交叉角度研究[J]. 公路交通科技, 2020, 37 (10): 118-126.PAN B H, ZHAO Y T, WEN C P, et al. Study on highway intersection angle based on driver's visual characteristics and stopping sight distance[J]. Journal of Highway and Transportation Research and Development, 2020, 37(10): 118-126. (in Chinese) [17] LIOI A, HAZOOR A, CASTRO M, et al. Impact on driver behaviour of guardrails of different height in horizontal-vertical coordinated road scenarios with a limited available sight distance[J]. Transportation Research Part F: Traffic Psychology and Behaviour, 2022, 84: 287-300. doi: 10.1016/j.trf.2021.12.008 [18] 邢福东, 史琴. 高速公路曲线路段内侧车道停车视距分析及改善措施研究[J]. 公路交通科技(应用技术版), 2020, 16 (11): 311-313.XING F D, SHI Q. Study on stopping sight distance in the inner lane of expressway curve section and study on improvement measures[J]. Journal of Highway and Transportation Research and Development (Applied Technology Edition), 2020, 16(11): 311-313. (in Chinese) [19] 白浩晨, 潘兵宏, 张江洪, 等. 基于停车视距的高速公路最小圆曲线半径研究[J]. 公路交通科技, 2021, 38(9): 60-67, 77.BAI H C, PAN B H, ZHANG J H, et al. Study on minimum circular curve radius of expressway based on stopping sight distance[J]. Journal of Highway and Transportation Research and Development, 2021, 38(9): 60-67, 77. (in Chinese) [20] BASSANI M, CATANI L, SALUSSOLIA A, et al. A driving simulation study to examine the impact of available sight distance on driver behavior along rural highways[J]. Accident Analysis & Prevention, 2019, 131: 200-212. [21] 李阳钊, 陈海华, 黄申春, 等. 基于自然驾驶轨迹数据的城市快速路小型车辆换道特性分析[J]. 交通信息与安全, 2024, 42(5): 33-41.LI Y Z, CHEN H H, HUANG S C, et al. Analysis of small vehicle lane-changing characteristics of urban expressway based on naturalistic driving trajectory data[J]. Journal of Transport Information and Safety, 2024, 42(5): 33-41. (in Chinese) [22] DATA FROM SKY. An ultimate tool for the next generation of traffic surveys[DB/OL]. (2020-03-10)[2025-03-18]. https://datafromsky.com/trafficsurvey/ [23] 方靖, 荣建, 祝站东, 等. 自由流状态的判别标准研究[J]. 中国公路学报, 2010, 23(增刊1): 65-68.FANG J, RONG J, ZHU Z D, et al. Research on judgment criterion of free-flow state[J]. China Journal of Highway and Transport, 2010, 23(S1): 65-68. (in Chinese) [24] 王科, 刘晏荣, 张发如. 停车视距计算长度的修正研究[J]. 公路, 2023, 68(7): 322-327.WANG K, LIU Y R, ZHANG F R. Research on correction calculated length of stopping sight distance[J]. Highway, 2023, 68(7): 322-327. (in Chinese) [25] 李霖, 朱西产, 马志雄. 驾驶人在真实交通危险工况中的制动反应时间[J]. 汽车工程, 2014, 36(10): 1225-1229, 1253.LI L, ZHU X C, MA Z X. Driver brake reaction time under real traffic risk scenarios[J]. Automotive Engineering, 2014, 36(10): 1225-1229, 1253. (in Chinese) [26] 王星月. 合并设置下互通立交主线渐变点至服务区长度可靠性设计[D]. 武汉: 武汉理工大学, 2024.WANG X Y. Reliability design of the length from the interchange mainline transition point to the service area under combined setting[D]. Wuhan: Wuhan University of Technology, 2024. (in Chinese) [27] 中华人民共和国交通运输部. 公路工程结构可靠性设计统一标准: JTG 2120-2020[S]. 北京: 中交公路规划设计院有限公司, 2020.Ministry of Transport of the People's Republic of China. Unified standard for reliability design of highway engineering structures: JTG 2120-2020[S]. Beijing: CCCC Highway Consultants Co., Ltd., 2020. (in Chinese) [28] 汪金辉, 周雨, 庄磊, 等. 全球客船的社会风险可接受标准及应用研究[J]. 中国安全科学学报, 2020, 30(9): 195-201.WANG J H, ZHOU Y, ZHUANG L, et al. Social risk acceptance criteria of global passenger ships and its application[J]. China Safety Science Journal, 2020, 30(9): 195-201. (in Chinese) [29] 姜涵, 张健, 张海燕, 等. 基于强化学习的交叉口智能网联车多目标通行控制方法[J]. 交通信息与安全, 2024, 42(1): 84-93. doi: 10.3963/j.jssn.1674-4861.2024.01.010JIANG H, ZHANG J, ZHANG H Y, et al. A multi-objective traffic control method for connected and automated vehicle at signalized intersection based on reinforcement learning[J]. Journal of Transport Information and Safety, 2024, 42(1): 84-93. (in Chinese) doi: 10.3963/j.jssn.1674-4861.2024.01.010 [30] MILANÉS V, SHLADOVER S E. Modeling cooperative and autonomous adaptive cruise control dynamic responses using experimental data[J]. Transportation Research Part C: Emerging Technologies, 2014, 48: 285-300. doi: 10.1016/j.trc.2014.09.001 [31] SUMO, Car-Following-Models[EB/OL]. (2024-10-30)[2025-02-22]. https://sumo.dlr.de/docs/Car-Following-Models.html .[32] 李鹏辉, 董倩茹, 袁赫男, 等. 面向自动驾驶仿真测试的高覆盖切入场景库生成方法[J]. 中国公路学报, 2024, 37(7): 237-249.LI P H, DONG Q R, YUAN H N, et al. High-coverage cut-in scenario library generation for automated driving simulation testing[J]. China Journal of Highway and Transport, 2024, 37 (7): 237-249. (in Chinese) [33] 中华人民共和国交通运输部. 公路工程技术标准: JTG B01-2014[S]. 北京: 人民交通出版社, 2014.Ministry of Transport of the People's Republic of China. Technical standard of highway engineering: JTG B01-2014[S]. Beijing: People's Communications Press, 2014. (in Chinese) -

 点击查看大图
点击查看大图
计量
- 文章访问数: 6
- HTML全文浏览量: 6
- PDF下载量: 0
- 被引次数: 0