

A Collision Model for Fixed-wing Aircraft over Highways Considering Visual Blind Zones
-
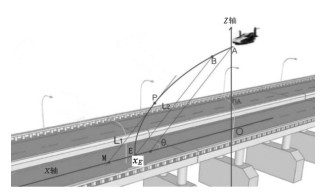
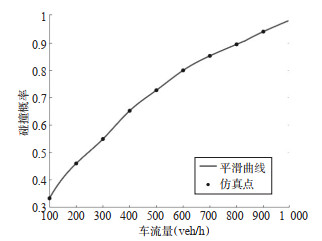
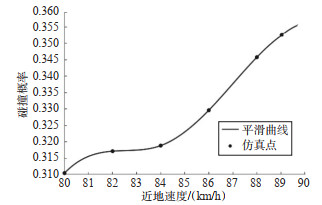
摘要: 针对小型固定翼飞行器在公路紧急迫降时,视野盲区影响飞行员安全距离判断,进而增加飞行器与地面车辆碰撞概率的问题,以SA60L小型固定翼飞行器为研究对象,构建了面向视野盲区的低空飞行器-地面车辆碰撞模型,量化研究了多因素对碰撞风险的影响。基于SA60L的降落特性,建立目视降落过程的三维视野盲区模型,以飞行员位置为基点构建三维坐标系,结合人眼20°下视角约束,确定视野盲区在地面的投影范围。结合地面车辆驾驶员反应时等参数,将碰撞场景划分为2类,建立碰撞概率模型:针对后方车辆碰撞场景,推导未制动、制动后速度未减至0,以及制动后速度减至0这3种状态下的碰撞概率公式;针对前方车辆碰撞场景,以飞行器着陆滑跑停止距离覆盖前方车辆为冲突条件,建立碰撞概率计算逻辑。同时,将三维视野盲区作为概率计算的前置约束,仅当地面车辆进入危险区域时启动计算采用蒙特卡洛方法进行10 000次仿真,分析地面车速、车流量、飞行近地速度及降落高度对碰撞风险的影响,并构建多元线性回归模型。结果表明:地面车流量(t =15.78)与地面车速(t =9.25)对碰撞概率影响最显著,车流量与近地速度均与碰撞概率近似线性正相关,地面车速升高使碰撞概率振幅增大,降落高度对碰撞概率呈“先增后减”非线性影响;当地面车速超过80 km/h且降落高度低于200 m时形成高风险区域,碰撞概率从安全阈值区(车速小于40 km/h且高度大于200 m)的0.12提升至0.27,增幅2.3倍。多元线性回归模型决定系数R2为0.965,模型拟合度与显著性良好。Abstract: To address the problem of the negative influence of visual blind spots on pilots'judgment of safe distances during emergency road landings of small fixed-wing aircraft, thereby increasing the probability of collisions with ground vehicles, this study constructs a low-altitude aircraft-ground vehicle collision model considering visual blind spots and uses SA60L as a research object. It quantitatively analyzes the effects of multiple factors on collision risks. Based on the landing characteristics of the SA60L aircraft, a three-dimensional visual blind spots model for the visual landing process is established. A three-dimensional coordinate system is constructed by using the pilot's position as the base point and combined with a 20° downward visual angle constraint to determine the projection range of the visual blind spots on the ground. Collision scenarios are classified into two categories by integrating parameters such as vehicle drivers'reaction time, thus a collision probability model is established. For collisions with rear vehicles, collision probability formulas are derived from three states: no braking, speed not reduced to 0 after braking, and speed reduced to 0 after braking. For collisions with front vehicles, the collision probability calculation logic is established under the conflict conditions that the aircraft landing roll distance covers the front vehicles. The three-dimensional visual blind spots are used as a pre-constraint for probability calculations, and the computation using the Monte Carlo method is activated to conduct 10, 000 simulations only when ground vehicles enter dangerous areas. These simulations analyze how ground vehicle speed, traffic flow, aircraft near-ground speed, and landing altitude affect collision risk and construct a multiple linear regression model. The results indicate that ground traffic flow (t =15.78) and ground vehicle speed (t =9.25) have the most significant impact on collision probability, with both factors showing approximately linear positive correlation with collision probability and increasing ground vehicle speed leads to an increase in collision probability amplitude. Landing altitude has a nonlinear"first increase then decrease"effect on collision probability. A high-risk zone is formed when ground vehicle speed exceeds 80 km/h and landing altitude is below 200 m, where collision probability increases from 0.12 in the safety threshold zone (speed < 40 km/h and altitude > 200 m) to 0.27, representing a 2.3-fold increase. The determination coefficient of the multiple linear regression model is R2 =0.965, indicating good fitting and significance.
-
Key words:
- aviation safety /
- fixed-wing aircraft /
- collision probability /
- Monte Carlo method /
- visual blind spots
-

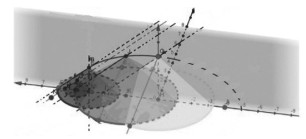
图 3 驾驶员视野盲区三维图
Figure 3. Three-dimensional display of blind area of driver's visual field

图 4 地面车流量对碰撞概率的影响
Figure 4. The influence of ground traffic flow on collision probability

图 5 近地速度对碰撞概率的影响
Figure 5. The influence of low-altitude speed on collision probability

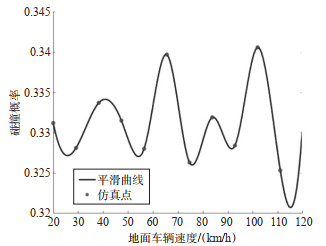
图 6 地面车辆速度对碰撞概率的影响
Figure 6. The influence of ground vehicle speed on collision probability

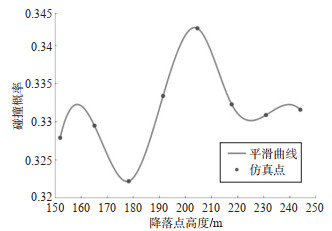
图 7 降落点高度对碰撞概率的影响
Figure 7. The influence of landing point altitude on collision probability

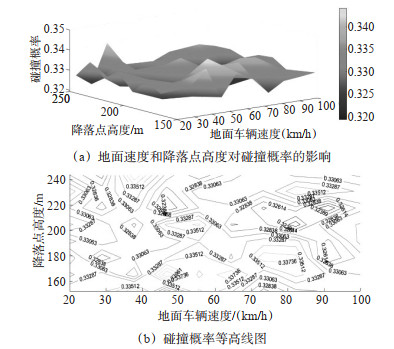
图 8 多因素共同作用对碰撞概率的影响
Figure 8. The influence of multi-factor joint action on collision probability
表 1 SA60L飞机参数
Table 1. SA60L aircraft parameter
参数 数值 参数 数值 整机长/m 6.89 巡航速度/(km/h) 220 水平机高/m 2.53 机动速度/(km/h) 180 翼展/m 8.6 着陆滑跑停止距离/m 175 失速速度/(km/h) 73 前部设备窗口/(mm×mm) 500×400 起飞离地速度/(km/h) 85 后部设备窗口/(mm×mm) 400×350  下载: 导出CSV
下载: 导出CSV
表 2 多元线性回归模型参数及模型评价结果
Table 2. The parameters of multiple linear regression model and model evaluation results
参数 数值 t值 p值 截距β0 -0.302 1 -12.36 <1×10-16 车流量系数β1 0.000 12 15.78 <1×10-16 近地速度系数β2 0.015 0 7.24 <1×10-16 地面车速系数β3 0.006 0 9.25 <1×10-16 降落点高度系数β4 -0.002 5 7.86 <1×10-16 决定系数R2 0.965 F统计量 2 846.32 残差标准差 0.021
下载: 导出CSV
-
[1] MIHARA Y N, TSUBASA N, et al. Airframe design optimization and simulation of a flying car for medical emergencies[J]. International Journal of Automation Technology, 2022, 16(2): 183-196. doi: 10.20965/ijat.2022.p0183 [2] 孟祥伟, 张平, 王瑛. 交叉航路航空器碰撞风险评估[J]. 北京航空航天大学学报, 2010, 36(9): 1021-1025.MENG X W, ZHANG P, WANG Y. Cross route aircraft collision risk assessment[J]. Journal of Beijing University of Aeronautics and Astronautics, 2010, 36(9): 1021-1025. (in Chinese). [3] LIU J, CHEN Z, YU J Y, et al. Unmanned aerial vehicle strike on a flat plate: tests and numerical simulations[J]. Chinese Journal of Aeronautics, 2023, 36(4): 286-298. doi: 10.1016/j.cja.2023.02.018 [4] ZHANG Z D, WANG Z J, YU J, et al. Extended dynamic system modulation for real-time obstacle avoidance[J]. Chinese Journal of Aeronautics, 2022, 35(12): 212-225. doi: 10.1016/j.cja.2022.01.007 [5] GUAN X M, LV R L, SHI H X, et al. A survey of safety separation management and collision avoidance approaches of civil UAS operating in integration national airspace system[J]. Chinese Journal of Aeronautics, 2020, 33(11): 2851-2863. doi: 10.1016/j.cja.2020.05.009 [6] GAN X, WU Y, LIU P, et al. Dynamic collision avoidance zone modeling method based on UAV emergency collision avoidance trajectory[C]. 2020 IEEE International Conference on Artificial Intelligence and Information Systems, Dalian, China: IEEE, 2020: 693-696. [7] PAN W J, XU Y X, WANG J K. Traffic collision avoidance system warning risk of transport and training aircraft based on related parallel approaches[C]. 2022 International Conference on Computer Engineering and Artificial Intelligence, Shijiazhuang, China: IEEE, 2022. [8] ZHOU Q, FENG H, LIU Y. Multigene and improved anti-collision RRT* algorithms for unmanned aerial vehicle task allocation and route planning in an urban air mobility scenario[J]. Biomimetics, 2024, 9(3): 125-132. doi: 10.3390/biomimetics9030125 [9] 王兴隆, 王友杰. 面向城市低空的多机型eVTOL安全间隔评估[J]. 航空学报, 2025, 46(1): 268-283.WANG X L, WANG Y J. Multi-Aircraft eVTOL Safety Interval evaluation for urban low altitude[J]. Acta Aeronautica et Astronautica Sinica, 2025, 46(1): 268-283. (in Chinese) [10] 王兴隆, 王友杰. 基于改进Event模型的多旋翼型eVTOL垂直间隔安全评估方法[J]. 交通信息与安全, 2024, 42(1): 19-27. doi: 10.3963/j.jssn.1674-4861.2024.01.003WANG X L, WANG Y J. A safety evaluation of vertical separation for multi-rotor eVTOL basedon an improved event model[J]. Journal of Transport Information and Safety, 2024, 42(1): 19-27. (in Chinese) doi: 10.3963/j.jssn.1674-4861.2024.01.003 [11] 陈锦涌, 周锐, 张宇航, 等. 一种考虑飞行轨迹不确定性的碰撞风险评估方法[J]. 中国科学: 技术科学, 2021, 51: 469-479.CHEN J Y, ZhOU R, ZHANG Y H, et al. Collision risk evaluation method for flight trajectory with uncertainty[J]. Scientia Sinica(Technologica), 2021, 51: 469-479. (in Chinese) [12] 张健, 宗石研, 赵嶷飞, 等. 非交叉汇聚跑道同时起降运行管制策略[J]. 科学技术与工程, 2025, 25(20): 8753-8759.ZHANG J, ZONG SH Y, ZHAO Y F, et al. Control strategy for simultaneous departure and approach on non-intersecting converging runways[J]. Science Technology and Engineering, 2025, 25(20): 8753-8759. [13] 康瑞, 杨凯. 考虑驾驶方式的车辆与航空器交叉冲突评估[J]. 中国安全生产科学技术, 2023, 19(2): 218-223.KANG R, YANG K. Assessment on cross conflict of vehicle and aircraft considering driving modes[J]. Journal of Safety Science and Technology, 2023, 19(2): 218-223. (in Chinese) [14] CHEN Y Q, YANG H, HE X, et al. Research on safety separation distance in paired approach based on monte carlo simulation[J]. International Journal of Computational Intelligence Systems, 2024, 17(1): 1-8. doi: 10.1007/s44196-023-00380-w [15] 卢飞, 张健, 赵二丽. 基于模糊贝叶斯和事件树的配对进近碰撞风险研究[J]. 中国安全科学学报, 2024, 34(12): 34-73.LU F, ZHANG J, ZHAO E L. Research on collision risk of paired approach based on fuzzy Bayesian and event tree[J]. China Safety Science Journal, 2024, 34(12): 64-73. (in Chinese) [16] LIN B F, CHAN Y M, FU L C, et al. Integrating appearance and edge features for sedan vehicle detection in the blind-spot area[J]. IEEE Transactions on Intelligent Transportation Systems, 2012, 13(2): 737-747. doi: 10.1109/TITS.2011.2182649 [17] PARADA R, AGUILAR A, ALONSO Z J, et al. Machine learning-based trajectory prediction for vru collision avoidance in V2X environments[C]. 2021 IEEE Global Communication-sconference(GLOBECOM), Madrid, Spain: IEEE, 2021. [18] 陆斯文, 方守恩, 李刚. 城市道路人车冲突和碰撞概率微观模型研究[J]. 同济大学学报(自然科学版), 2009, 37 (12): 1627-1632.LU S W, FANG S S, LI G. Study on microcosmic mod els of human-vehicle conflict and collision probability on urban roads[J]. Journal of Tongji University(Natural Science). 2009, 37(12): 1627-1632. (in Chinese) [19] ROBERT R E, JONATHAN B H. Feasibility analyses for paired approach procedures forclosely spaced parallel runways[C]. Integrated Communications, Navigation, and Surveillance Conference, Herndon, USA: IEEE, 2011. [20] 郑刚, 俎兆飞, 孔祚. 基于驾驶员反应时间的自动紧急制动避撞策略[J]. 重庆理工大学学报(自然学), 2020, 34 (12): 45-52.ZHENG G, ZU ZH F, KONG Z. Automatic emergency braking collision avoidance strategy based on driver's reaction time[J]. Journal of Chongqing University of Technology (Nature Science), 2020, 34(12): 45-52. (in Chinese) -

 点击查看大图
点击查看大图

计量
- 文章访问数: 6
- HTML全文浏览量: 5
- PDF下载量: 0
- 被引次数: 0