

Collision Avoidance and Early Warning Method for Inland Bridge Areas Based on Enhanced Safety Potential Fields
-
摘要: 为精准量化内河桥区船舶碰撞风险动态演变过程并实现分级预警,研究了一种融合船舶动态运动预测与多维势场耦合的评估方法。结合船舶航行特性与桥区环境约束,对传统安全势场模型进行适配性改进并应用于船桥防撞风险评估。基于风险致因理论,将桥区风险分解为静态障碍物、航道约束、人因决策及船舶运动动能四要素,分别构建静态势能场、边界势场、行为势场及时变动能场,通过权重分配实现四类势场的耦合。针对风流扰动引发的船舶运动非线性及预测不确定性,采用卡尔曼滤波算法实时处理船舶自动识别系统(automatic identification system,AIS)数据,校正过程噪声与观测噪声以预测船舶动态偏差,将该偏差作为时变动能场修正参数,提升势场模型对动态风险的表征精度。将时变动能场与改进势场模型叠加形成综合预测场强,结合实测AIS数据生成实测场强,建立“预测-实测”双场耦合预警机制,参考相关条例及历史案例设定动态阈值触发分级预警。以池州长江公路大桥为背景开展实验验证,结果显示:T2、T3、T4时刻预测场强分别为0.75、0.64、0.45,实际场强分别为0.65、0.59、0.40,最大相对误差13.3%出现于T2过桥墩时刻。实验证实该模型在内河桥区船桥碰撞风险预警中的实时性与准确性,双场耦合机制可在桥墩高风险区域实现误差可控预警,为船舶过桥决策提供动态风险量化依据。Abstract: To precisely quantify the dynamic evolution of vessel collision risks in inland bridge zones and enable tiered early warning, this study proposes an assessment method integrating vessel dynamic motion prediction with multi-dimensional potential field coupling. By adapting traditional safety potential field models to account for vessel navigation characteristics and bridge zone environmental constraints, the approach is applied to vessel-bridge collision risk evaluation. Based on risk causation theory, bridge zone risks are decomposed into four elements: static obstacles, channel constraints, human decision-making, and vessel kinetic energy. Static potential energy fields, boundary potential fields, behavioral potential fields, and time-varying kinetic energy fields are constructed respectively. Weighted allocation achieves coupling among these four potential fields. To address nonlinear vessel motion and prediction uncertainties caused by wind-induced flow disturbances, the Kalman filter algorithm processes automatic identification system (AIS) data in real time. This corrects process noise and observation noise to predict vessel dynamic deviations, which serve as correction parameters for the time-varying kinetic energy field, enhancing the potential field model's accuracy in representing dynamic risks. The time-varying kinetic energy field is superimposed with the improved potential field model to generate a comprehensive predicted field strength. This is combined with measured AIS data to produce an observed field strength, establishing a "prediction-observation" dual-field coupling early warning mechanism. Dynamic thresholds are set based on relevant regulations and historical cases to trigger graded warnings. Experimental validation conducted at the Chizhou Yangtze River Highway Bridge revealed: predicted field strengths at time points T2, T3, and T4 were 0.75, 0.64, and 0.45, respectively, while actual field strengths were 0.65, 0.59, and 0.40. The maximum relative error of 13.3% occurred at T2 during the bridge pier passage. The experiment confirmed the model's real-time capability and accuracy in collision risk warning for vessels passing under inland river bridges. The dual-field coupling mechanism enables controllable-error warnings in high-risk pier zones, providing dynamic risk quantification for vessel navigation decision-making.
-

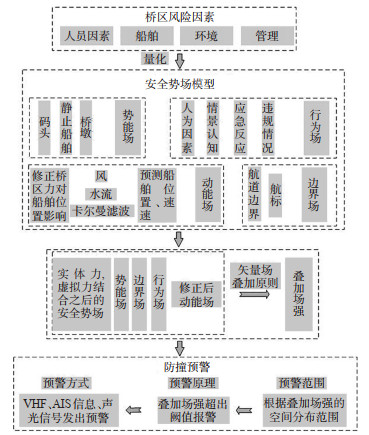
图 1 基于安全势场模型船桥防撞预警框架
Figure 1. Safety potential field model based ship bridge collision warning framework

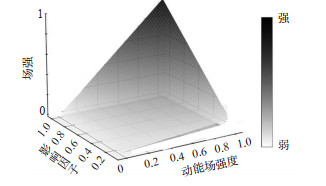
图 3 动态物标动能场强度示意图
Figure 3. Schematic diagram of the kinetic energy field strength of the dynamic object marker

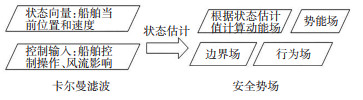
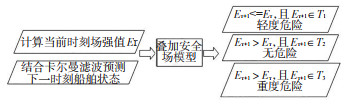
图 7 船舶状态预测与安全势场结合示意图
Figure 7. Schematic of the combination of state prediction and safety potential field

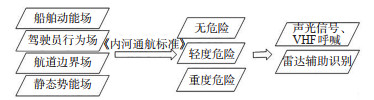
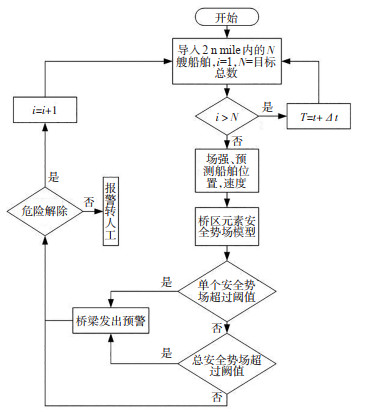
图 11 桥区安全势场与船舶碰撞预警流程
Figure 11. Safety potential field and ship collision warning process in bridge area

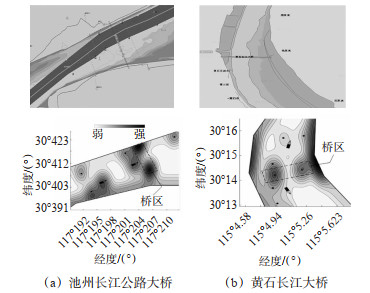
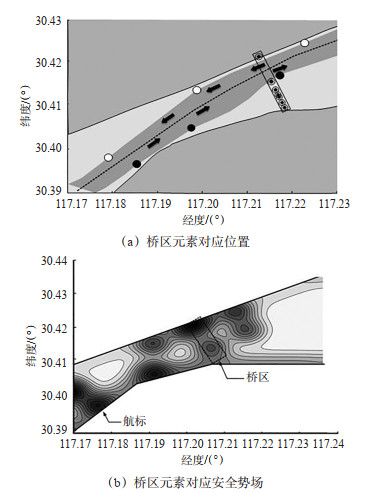
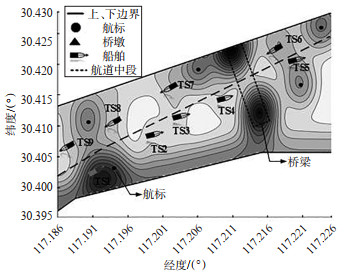
图 13 桥区航行安全势场分布
Figure 13. Distribution of navigational safety potential fields in the bridge area

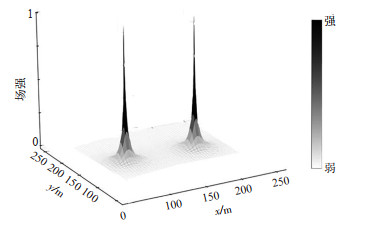
图 14 AIS数据下桥区船舶安全势场分布
Figure 14. Ship safety potential field distribution in the bridge area based on AIS data

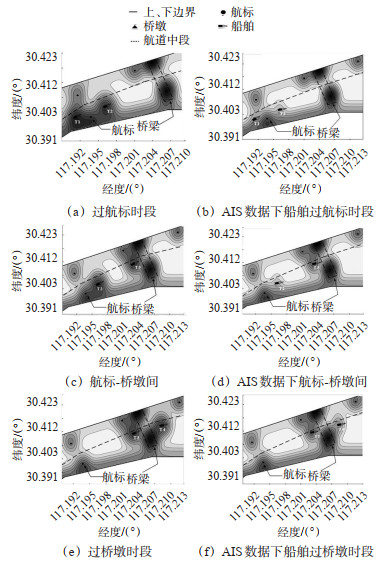
图 15 多用途船不同时段风险预警对比
Figure 15. Comparison of risk warnings for multipurpose ships at different time periods
表 1 桥区水域风险元素及对应安全场
Table 1. Risk elements and corresponding safety potential fields in the waters of the bridge area
安全场类型 对应桥区风险因素 风险元素特征 静态势能场 桥墩、桥台、静止船舶 位置固定,场强随距离衰减 动能场 船舶动能、航速、航向 受船速、航向、流速影响 边界势场 航道边界、航标、通航孔 持续约束船舶航行,防止偏航或搁浅 行为场 驾驶员行为(决策管理)、VTS 受驾驶员操作习惯、VTS通信协调、环境感知影响  下载: 导出CSV
下载: 导出CSV
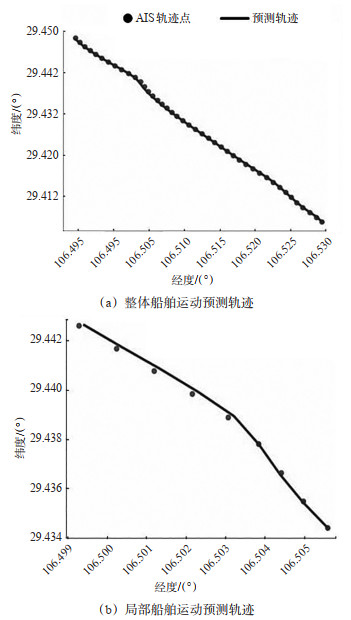
表 2 船舶直航与改向航迹预测误差对比分析
Table 2. Comparative analysis of the prediction errors of the ship's straight and diverted tracks
位置 直航 改向 预测经度/(°) 106.503 861 106.50 预测纬度/(°) 29.437 757 29.441 7 AIS经度/(°) 106.503 847 106.500 23 AIS纬度/(°) 29.437 8 29.441 663 误差经度/(°) 0.000 014 0.000 23 误差纬度/(°) 0.000 043 0.000 037
下载: 导出CSV
表 3 安全场模型参数
Table 3. Parameters of the safety potential field model
参数 值 ki 2.5 τ 0.18 β 2.2 μi 20 Hr 0.1
下载: 导出CSV
表 4 下行多用途船舶参数
Table 4. Parameters of downstream multipurpose vessels
参数 数值 船名 水域环境16号 船长/m 48 船宽/m 14 吃水/m 7 航速/(n mile/h) 8
下载: 导出CSV
表 5 下行过程中不同时刻预测与真实状态预警级别
Table 5. Predicted and true state warning levels at different moments during the downward spiral
时刻 预测值P 预警级别 AIS值R 预警级别 相对误差
$\left(\frac{P-R}{\max (P, R)} \%\right)$预警级别范围 T1 0.58 轻度危险 无危险T1(0~0.5) T2 0.75 轻度危险 0.65 轻度危险 13.3 轻度危险T2(>0.5~0.80) T3 0.64 轻度危险 0.59 轻度危险 7.8 重度危险T3(>0.8~1) T4 0.45 无危险 0.40 无危险 11.1
下载: 导出CSV
-
[1] GE J, LUO T, QIU J. Discretized macro-element method to evaluate the crushing behavior and protective performance of crashworthy devices under ship collisions[J]. Ocean Engineering, 2024, 306: 118125. doi: 10.1016/j.oceaneng.2024.118125 [2] 王飞, 吕忠达, 赵卓, 等. 基于刚柔匹配的桥梁柔性防撞装置研究[J]. 桥梁建设, 2021, 51(1): 82-87.WANG F, LYU ZD, ZHONG D, et al. Research on flexible anti-collision device for bridges based on rigid-flexible matching[J]. Bridge Construction, 2021, 51(1): 82-87. (in Chinese) [3] 夏烨, 陈李沐, 王君杰, 等. 基于SSD的桥梁主动防船撞目标检测方法与应用[J]. 湖南大学学报(自然科学版), 2020, 47(3): 97-105.XIA Y, CHEN L M, WANG J J, et al. Single shot multibox detector based vessel detection method and application for active anti-collision monitoring[J]. Journal of Hunan University (Natural Sciences), 2020, 47(3): 97-105. [4] PERERA L P, GUEDES SOARES C. Collision risk detection and quantification in ship navigation with integrated bridge systems[J]. Ocean Engineering, 2015, 109: 344-354. doi: 10.1016/j.oceaneng.2015.08.016 [5] WAN Y, LIU C, QIAO W. An safety assessment model of ship collision based on Bayesian Network[C]. 2019 European Navigation Conference(ENC), Warsaw, Poland: Polish Navigation Forum, 2019. [6] WU B, YIP T L, YAN X, et al. Fuzzy logic based approach for ship-bridge collision alert system[J]. Ocean Engineering, 2019, 187: 106152. doi: 10.1016/j.oceaneng.2019.106152 [7] 王建强, 吴剑, 李洋. 基于人-车-路协同的行车风险场概念、原理及建模[J]. 中国公路学报, 2016, 29(1): 105-114.WANG J Q, WU J, LI Y. Concept, principle and modeling of driving risk field based on driver-vehicle-road Interaction[J]. China Journal of Highway and Transport, 2016, 29(1): 105-114. (in Chinese) [8] 李林恒, 甘婧, 曲栩, 等. 智能网联环境下基于安全势场理论的车辆跟驰模型[J]. 中国公路学报, 2019, 32(12): 76-87.LI L H, G J, QU X, et al. Car-following model based on safety potential field theory under connected and automated Vehicle Environment[J]. China Journal of Highway and Transport, 2019, 32(12): 76-87. (in Chinese) [9] 谢楚安, 任羿, 杨德真, 等. 面向无人驾驶车辆的行车安全场模型构建方法[J]. 北京航空航天大学学报, 2024, 50(4): 1375-1383.XIE C A, REN Y, YANG D Z, et al. Construction method of driving safety field model for unmanned vehicles[J]. Journal of Beijing University of Aeronautics and Astronautics, 2024, 50(4): 1375-1383(in Chinese) [10] YANG Z S, YU Y, YU D X, et al. APF-based car following behavior considering lateral distance[J]. Advances in Mechanical Engineering, 2013(5): 207104. [11] 王群朋, 李龙浩, 关宏旭, 等. 基于三维势场模型的船舶局部路径规划方法[J]. 中国舰船研究, 2025, 20(1): 135-146.WANG Q P, LI L H, GUAN H X, et al. Ship local path planning method based on three-dimensional potential field model[J]. Chinese Journal of Ship Research, 2025, 20(1): 135-146(in Chinese). [12] 程细得, 刘鹏辉, 韩琨羽, 等. 基于人工势场-操纵运动混合模型的船舶路径规划[J]. 华中科技大学学报(自然科学版), 2024, 52(1): 85-90.CHENG X D, LIU P H, HAN K Y, et al. Path planning of ship based on artificial potential field-maneuvering motion hybrid model[J]. Journal of Huazhong University of Science and Technology(Natural Science Edition), 2024, 52(1): 85-90(in Chinese). [13] GOERLANDT F, MONTEWKA J. Maritime transportation risk analysis: Review and analysis in light of some foundational issues[J]. Reliability Engineering & System Safety, 2015, 138: 115-134. [14] 苏从辉, 尚龙. 池州长江公路大桥4号主墩钢围堰施工技术[J]. 世界桥梁, 2018, 46(5): 32-35.SU C H, SHANG L. Construction techniques for steel cofferdam of main pier No. 4 of Chi zhou Chang jiang river highway bridge[J]. World Bridges, 2018, 46(5): 32-35. [15] 吴建华, 彭虎, 王辰, 等. 基于AIS通信量的水上交通事故检测方法[J]. 交通信息与安全, 2023, 41(5): 83-94.WU J H, PENG H, WANG C, et al. A detection method for maritime traffic accidents based on AIS communication Volume[J]. Journal of Transport Information and Safety, 2023, 41 (5): 83-94. [16] HETHERINGTON C, FLIN R, MEARNS K. Safety in shipping: the human element[J]. Journal of Safety Research, 2006, 37 (4): 401-411. doi: 10.1016/j.jsr.2006.04.007 [17] LI L, GAN J, YI Z, et al. Risk perception and the warning strategy based on safety potential field theory[J]. Accident Analysis & Prevention, 2020, 148: 105805. [18] FAN Y, QIAO S, WANG G, et al. A modified adaptive Kalman filtering method for maneuvering target tracking of unmanned surface vehicles[J]. Ocean Engineering, 2022, 266: 112890. doi: 10.1016/j.oceaneng.2022.112890 [19] FARAGHER R. Understanding the basis of the Kalman filter Via a simple and intuitive derivation[Lecture Notes][J]. IEEE Signal Processing Magazine, 2012, 29(5): 128-132. doi: 10.1109/MSP.2012.2203621 [20] 魏文军, 刘艳浩, 周仲成, 等. 考虑测量噪声和数据丢包的虚拟编组无模型自适应预测控制[J/OL]. 北京航空航天大学学报. 1-18[2025-09-09].WEI W J, LIU Y H, ZHOU Z C, et al. Model-free adaptive predictive control for virtual grouping considering measurement noise and data packet dropout[J/OL]. Journal of Beijing University of Aeronautics and Astronautics. 1-18[2025-09-09] (in Chinese). [21] 徐铁, 蔡奉君, 胡勤友, 等. 基于卡尔曼滤波算法船舶AIS轨迹估计研究[J]. 现代电子技术, 2014, 37(5): 97-100, 104.XU T, CAI F J, HU Q Y, et al. Research on estimation of AIS vessel trajectory data based on Kalman filter algorithm[J]. Modern Electronics Technique, 2014, 37(5): 97-100, 104. (in Chinese) -



 点击查看大图
点击查看大图
计量
- 文章访问数: 6
- HTML全文浏览量: 3
- PDF下载量: 0
- 被引次数: 0