

A Safety Evaluation of Vertical Separation for Multi-rotor eVTOL Based on an Improved Event Model
-
摘要: 电动垂直起降飞行器(eVTOL)是1种新兴的交通工具,也是近年来研究的热点。受限于垂直定位精度低、穿越飞行风险隐患多等问题,eVTOL运行间隔标准难以确定,尚不具备实际应用条件。为探索该飞行器垂直间隔标准,针对多旋翼型eVTOL的底部较宽、顶部逐渐变细的外形特性,改进了经典Event垂直碰撞模型,并提出了基于改进Event模型的多旋翼型eVTOL垂直间隔安全评估方法。该模型考虑了多旋翼型eVTOL的外形特征、导航精度、运行特点、定位误差、飞行速度特性及速度误差等因素,引入相对速度、侧向重叠概率、垂直重叠概率等计算模型参数,并将原长方体碰撞盒修正为圆台体碰撞盒,有效降低了计算冗余,提高了碰撞模型的精确性。以亿航216-S型多旋翼型eVTOL为例,计算了其在不同安全目标水平和不同导航精度下的最小垂直间隔,计算结果表明:①安全目标水平与导航精度的降低,都会导致最小垂直间隔的减少;②当安全目标水平为1×10-6次/飞行小时且导航精度为RNP10时,最小垂直间隔可缩小至11 m;③当导航精度为RNP10且垂直间隔为11 m时,基于改进Event模型计算的碰撞风险比原模型降低了24.78%。研究结果表明,在计算多旋翼型eVTOL的碰撞风险中,引入圆台体碰撞盒的垂直间隔安全评估方法更加精确合理,能够为多旋翼型eV-TOL垂直间隔标准制定提供理论支持。Abstract: The multi-rotor electric vertical take-off and landing vehicle (eVTOL) is a future vehicle, that has been a research hotspot in recent years. However, the limited accuracy of vertical positioning and potential dangers of crossing flight hamper the establishment of the operational separation standard (OSS) for eVTOL, which makes it far from the application in practice. To explore the OSS for eVTOL, the shape of the eVTOL is considered, which is wider at the bottom and taper at the top, an improved Event-based vertical collision model is developed, and the safety evaluation method for eVTOL is proposed based on the improved model. The proposed method considers the main characteristics of eVTOL such as the shape, navigation accuracy, operation feature, positioning error, flight speed, speed error, etc., uses a conical frustum collision box instead of the cuboid box in the original model, and introduces relative speed, probability of lateral overlap and probability of vertical overlap as the parameters in safety evaluation method, capturing the characteristics of the eVTOL, reducing the computational redundancy, and enhancing the accuracy of the collision model. To demonstrate the proposed model and method, the multi-rotor eVTOL EHang 216-S is taken as an example, and the vertical separation minimum (VSM) under different target levels of safety (TLS) and navigation accuracy are calculated. The results show that: ① the reduction of the TLS and the navigation accuracy will lead to the reduction of the VSM. ② When the TLS is set as 1×10-6 times/flight hour and the navigation accuracy is set as required navigation performance of 10 (RNP10), VSM can be reduced to 11 meters. ③ When the navigation accuracy is RNP10 and the VSM is 11 meters, the calculated collision risk by the proposed method will be lower than the original method by 24.78%. It indicates that the introduction of the conical frustum collision box in the safety evaluation for eVTOL would result in a more accurate and reasonable calculation of collision risk than the original method, providing theoretical support for the establishment of vertical separation standards for eVTOL.
-

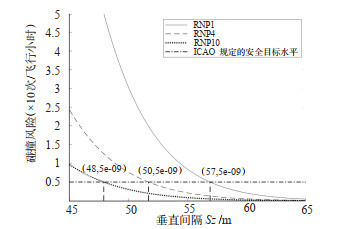
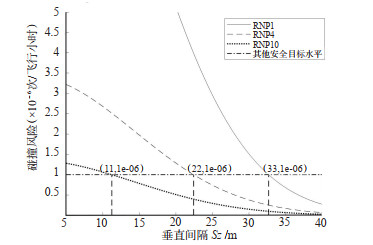
图 9 原模型与改进模型的碰撞风险
Figure 9. The risk of collision between the original model and the improved model
表 1 亿航216-S参数
Table 1. EH216-S parameters
参数 数值 a/m 5.63 b/m 5.63 c/m 3.2 h/m 1.855 ux/(km/h) 80 uy/(km/h) 50 uz/(km/h) 14 σA、σB/m 10 Vmax/(km/h) 130 σV/(km/h) 2  下载: 导出CSV
下载: 导出CSV
表 2 碰撞风险参数
Table 2. Collision risk parameters
参数 参数值 E(O) 0.01 Sx 600 Py(0)(RNP1) 0.043 0 Py(0)(RNP4) 0.010 8 Py(0)(RNP10) 0.004 3
下载: 导出CSV
-
[1] 张洪海, 邹依原, 张启钱, 等. 未来城市空中交通管理研究综述[J]. 航空学报, 2021, 42(7): 82-106. https://www.cnki.com.cn/Article/CJFDTOTAL-HKXB202107006.htmZHANG H H, ZOU Y Y, ZHANG Q Q, et al. Review of research on future urban air mobility(UAM)management[J]. Acta Aeronautica et Astronautica Sinica, 2021, 42(7): 82-106. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-HKXB202107006.htm [2] 杜伟, 孙娜. 电动垂直起降飞行器的发展现状研究[J]. 航空科学技术, 2021, 32(11): 1-7. https://www.cnki.com.cn/Article/CJFDTOTAL-HKKX202111001.htmDU W, SUN N Research on development status of eVTOL[J]. Aeronautical Science & Technology, 2021, 32(11): 1-7. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-HKKX202111001.htm [3] Deloitte Insights. Change is in the air: The elevated future of mobility: What's next on the horizon[R]. London: Deloitte Insights, 2019. [4] REICH P G. Analysis of long-range air traffic systems: separation standards—Ⅰ[J]. The Journal of Navigation, 1966, 19 (1): 88-98. doi: 10.1017/S037346330004056X [5] BROOKER P. Lateral collision risk in air traffic track systems: a'post-Reich'event model[J]. The Journal of Navigation, 2003, 56(3): 399-409. doi: 10.1017/S0373463303002455 [6] 徐肖豪, 李冬宾, 李雄. 飞行间隔安全评估研究[J]. 航空学报, 2008(6): 1411-1418. doi: 10.3321/j.issn:1000-6893.2008.06.001XU X H, LI D B, LI X. Research on safety assessment of flight separation[J]. Acta Aeronautica et Astronautica Sinica, 2008(6): 1411-1418. (in Chinese) doi: 10.3321/j.issn:1000-6893.2008.06.001 [7] 徐肖豪, 王振宇, 赵鸿盛. 基于Event的侧向碰撞风险改进模型[J]. 中国民航大学学报, 2008(3): 1-4. doi: 10.3969/j.issn.1001-5590.2008.03.001XU X H, WANG Z Y, ZHAO H S. Improved lateral collision risk model based on event[J]. Journal of Civil Aviation University of China, 2008(3): 1-4. (in Chinese) doi: 10.3969/j.issn.1001-5590.2008.03.001 [8] 戴福青, 周启. 基于Event的垂直碰撞风险改进模型研究[J]. 中国民航大学学报, 2011, 29(6): 4-7. doi: 10.3969/j.issn.1001-5590.2011.06.002DAI F Q, ZHOU Q. Study on improved vertical collision risk model based on Event[J]. Journal of Civil Aviation University of China, 2011, 29(6): 4-7. (in Chinese) doi: 10.3969/j.issn.1001-5590.2011.06.002 [9] 黄晋, 焦瑶瑶, 刘厚荣, 等. 基于改进Event模型的交叉航路碰撞风险分析[J]. 航空计算技术, 2023, 53(1): 11-5. doi: 10.3969/j.issn.1671-654X.2023.01.003HUANG J, JIAO Y Y, LIU H R, et al. Cross route collision risk analysis based on improved event model[J]. Aeronautical Computing Technique, 2023, 53(1): 11-5. (in Chinese) doi: 10.3969/j.issn.1671-654X.2023.01.003 [10] 张兆宁, 时瑞军. 自由飞行下改进的Event碰撞风险计算模型[J]. 中国安全科学学报, 2015, 25(7): 35-40. https://www.cnki.com.cn/Article/CJFDTOTAL-ZAQK201507006.htmZHANG Z N, SHI R J. Study on free flight collision risk based on improved event model[J]. China Safety Science Journal, 2015, 25(7): 35-40. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-ZAQK201507006.htm [11] ZHANG Z Y, ZHANG J, WANG P, et al. Research on operation of UAVs in non-isolated airspace[J]. CMC-Comput Mater Continua, 2018, 57(1): 151-66. doi: 10.32604/cmc.2018.02890 [12] 杨新湦, 任治. 基于尾涡强度的无人机与民机纵向安全间隔评估研究[J]. 中国安全生产科学技术, 2018, 14(10): 64-9. https://www.cnki.com.cn/Article/CJFDTOTAL-LDBK201810010.htmYANG X S, REN Z. Research on assessment of longitudinal safety separation between UAV and civil aircraft based on trailing vortex intensity[J]. Journal of Safety Science and Technology, 2018, 14(10): 64-9. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-LDBK201810010.htm [13] 邓力. 无人机与民航客机碰撞概率研究[J]. 南京理工大学学报, 2019, 43(1): 122-128. https://www.cnki.com.cn/Article/CJFDTOTAL-NJLG201901017.htmDENG L. Research of collision probability of unmanned aerial vehicles and civil airplane[J]. Journal of Nanjing University of Science and Technology, 2019, 43(1): 122-128. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-NJLG201901017.htm [14] 甄然, 赵正, 康兢, 等. 基于EVENT改进模型的碰撞风险研究[J]. 河北工业科技, 2021, 38(1): 7-11. https://www.cnki.com.cn/Article/CJFDTOTAL-HBGY202101003.htmZHEN R, ZHAO Z. KANG J, et al. Research on collision risk based on improved EVENT model[J]. Hebei Journal of Industrial Science and Technology, 2021, 38(1): 7-11. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-HBGY202101003.htm [15] WEINERT A, CAMPBELL S, VELA A, et al. Well-Clear recommendation for small unmanned aircraft systems based on unmitigated collision risk[J]. Air Traffic Control Quarterly, 2018, 26(3): 113-22. [16] 张洪海, 李博文, 刘皞, 等. 自由空域下多旋翼无人机安全间隔标定方法[J]. 系统工程与电子技术: 2023, 45(10): 3149-3156. https://www.cnki.com.cn/Article/CJFDTOTAL-XTYD202310019.htmZHANG H H, LI B W, L H, et al. Demarcation method of safety separation for multi-rotor UAV in free airspace[J]. Systems Engineering and Electronics: 2023, 45(10): 3149-3156. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-XTYD202310019.htm [17] 徐肖豪, 李冬宾, 李雄, 等. 基于EVENT模型的垂直间隔碰撞风险研究[J]. 中国民航大学学报, 2008(4): 1-5, 17. https://www.cnki.com.cn/Article/CJFDTOTAL-ZGMH200804001.htmXU X H, LI D B, LI X, et al. Research on collision risk of vertical separation minima based on EVENT model[J]. Journal of Civil Aviation University of China, 2008(4): 1-5, 17. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-ZGMH200804001.htm [18] 韩松臣, 裴成功, 隋东, 等. 平行区域导航航路安全性分析[J]. 航空学报, 2006(6): 1023-1027. https://www.cnki.com.cn/Article/CJFDTOTAL-HKXB200606007.htmHAN S C, PEI C G, SUI D, et al. Security analysis of area navigation parallel airway[J]. Acta Aeronautica et Astronautica Sinica, 2006(6): 1023-1027. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-HKXB200606007.htm [19] 孟祥伟, 张平. 低空非管制空域航空器碰撞风险研究[C]. 2010年航空器适航与空中交通管理学术年会, 北京: 中国民航科学技术研究院, 2010.MENG X W, ZHANG P. Research on aircraft mid-air collision risk in low-altitude uncontrolled airspace[C]. 2010 Annual Conference on Airworthiness and Air Traffic Management. Beijing, China: Civil Aviation Science and Technology Research Institute of China, 2010. (in Chinese) [20] 王莉莉, 阳杰. 基于速度随机分布的低空空域小型无人机碰撞风险评估模型[J]. 交通信息与安全, 2022, 40(4): 64-70. doi: 10.3963/j.jssn.1674-4861.2022.04.007WANG L L, YANG J. A collision risk model for small UAVs based on velocity random distribution in low-altitude airspace[J]. Journal of Transport Information and Safety, 2022, 40(4): 64-70. (in Chinese) doi: 10.3963/j.jssn.1674-4861.2022.04.007 [21] ROYAL N. Safety Targets for UAM Vehicles[EB/OL]. (2021-08-18)[2023-05-01]. https://reports.nlr.nl/server/api/core/bitstreams/bc9bce31-b1ae-45e4-80e4-313789163459/content . -




 点击查看大图
点击查看大图
图(9) / 表(2)
计量
- 文章访问数: 974
- HTML全文浏览量: 496
- PDF下载量: 129
- 被引次数: 0