

A Review of Safety Studies on Lane Change Decision-makings for Connected Automated Vehicles
-
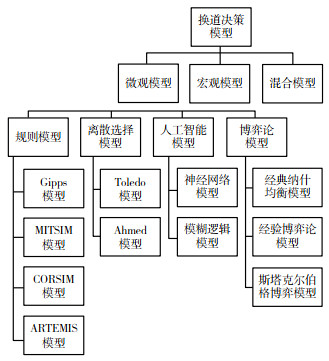
摘要: 实现智能网联汽车换道的安全决策是改善交通安全、提高道路机动性的关键任务。本文探究了智能网联汽车换道的安全性问题,从驾驶安全的角度出发,分析了极端换道行为和紧急换道行为给交通安全带来的不利影响,强调风险评估的重要性,并梳理了利用环境传感器、交通冲突指标、车辆微观轨迹数据等换道风险评估方法。通过风险评估识别风险,并采取相应的措施,能够显著减少危险换道行为导致的交通事故。阐述了智能网联汽车在传统环境以及车联万物(vehicle to everything,V2X)场景下,通过获取环境信息完成换道决策的方法;重点剖析了智能网联汽车在V2X环境下,通过周围环境的感知和识别、目标检测、数据处理进行决策,并对未来智能网联汽车在V2X环境下实现安全决策提出合理建议。然后分析了现有换道决策模型方法,归纳为4类:即规则模型、离散选择模型、人工智能模型、博弈论模型;系统地总结了决策模型在国内外道路行车安全领域的研究和应用现状、存在的问题,以及应用展望。综上所述,尽管智能网联汽车的换道技术已取得重大研究成果,但未来仍存在很多挑战。针对现有研究中存在的问题:低等级自动驾驶环境情况下如何安全可靠地进行决策、智能网联汽车在低渗透率情况下如何做出更为高效和智能的驾驶决策、信息不完全情况下如何实现安全决策、在换道决策模型算法的可优化性方面如何改进,提出可行的解决方案。Abstract: Safety of lane change decision-makings for connected automated vehicles (CAVs) is a key task to improve traffic safety and enhance road mobility. In this paper, the safety issues related to lane changing of CAVs are investigated. From the perspective of driving safety, the adverse impacts of extreme lane-changing behavior and emergency lane-changing behavior on traffic safety are analyzed, emphasizing the importance of risk assessment. The various risk assessment methods of lane changing are reviewed, including the use of environmental sensors, traffic conflict indicators, and vehicle-level micro-trajectory data. Identifying risks through risk assessment and taking corresponding measures can significantly reduce traffic accidents caused by dangerous lane-changing behavior. Furthermore, the methods for CAVs to make lane-changing decisions by obtaining environmental information in both traditional and vehicle to everything (V2X) environments are elaborated. Particularly focusing on the CAVs in V2X environment, the decision-making through the environment perception and recognition, targets detection, and data processing is analyzed. Reasonable recommendations are proposed for achieving safe decision-making by CAVs in V2X environment in the future. Then the existing models for decision-making of lane-changing are analyzed and categorized into four types: rule-based models, discrete choice models, artificial intelligence models, and game theory models. The status of research and application, existing problems, and prospects of decision-making models in the field of road traffic safety are systematically summarized, both domestically and internationally. In summary, despite significant research achievements in lane-changing technologies for CAVs, there are still many challenges ahead. To tackle the existing problems in research, such as ensuring safe and reliable decisions in low-level automated driving environments, making more efficient and intelligent driving decisions for CAVs in low-penetration scenarios, achieving safe decision-making in situations with incomplete information, and improving the optimization of the algorithms for lane-changing decision-making, feasible solutions are proposed accordingly.
-
表 1 换道风险评估方法总结
Table 1. Summary of lane change risk assessment methods
文献 年份 运用的方法 仿真场景 优点 [17] 2019 车辆运动学、博弈论 单向3车道 通过博弈论来建模自动驾驶和人类驾驶车辆之间的相互作用 [18] 2020 虚拟弹簧理论 单向3车道 能够适应个体差异 [19] 2020 长短期记忆法 单向2车道、单向3车道 整个模型可以更好地了解影响危险事故发生概率的因素 [20] 2021 多元贝叶斯 高速公路 提出的框架通过估计相邻车辆更大不确定性的更高风险,使其与现有方法区别开来 [21] 2021 概率模型 单向2车道 可以调整驾驶风格偏好,以满足不同消费者的需求 [22] 2022 交通冲突指标 交叉路口 增强基于冲突的模型预测性能 [23] 2021 交通冲突指标 高速公路 基于常规指标的优点和局限性,提出了改进的指标Ti  下载: 导出CSV
下载: 导出CSV
表 2 基于规则的换道模型
Table 2. Rule-based lane changing model
文献 年份 特点 存在的问题 实验环境 针对的路段 [28] 1986 涵盖了城市多种路况的驾驶条件 未对驾驶人行为进行划分 仿真 城市道路 [29] 1996 第1次将车辆换道方式分为自由换道和强制换道 换道时未考虑附近其他车辆 仿真 单向2车道 [30] 2022 适用范围广,不只局限在双车道,能提高所有车道之间的交通公平性,而不会降低安全性或乘坐舒适性。 未考虑道路限速条件对换道模型的影响 仿真 单向双车道、单向三车道 [31] 2019 提出1种新的决策规则,预测了未来一段时间内的车辆运动 未对驾驶人行为进行划分 仿真 高速公路 [32] 2022 考虑了不同车辆变道时驾驶行为的优先调度问,驾驶人主观因素对变道时行驶速度的影响以及车速与安全变道距离的关系 在交通流密度较大时效果不是很显著 仿真 单向2车道 [33] 2017 借鉴人工势场法思想,将换道收益函数和安全系数抽象成驾驶人感知的引力和斥力 无法适用于复杂的城市道路 仿真 单向2车道
下载: 导出CSV
表 3 基于离散选择的换道模型
Table 3. Lane changing model based on discrete selection
文献 年份 特点 存在的问题 实验环境 针对的路段 [34] 1996 考虑了驾驶人的异质性和状态依赖性 无法适用于复杂的城市道路 仿真 高速公路 [35] 2003 提出了1种集成式的换道模型,将自由换道与强制换道模型集成到同1个效用模型中 在拥堵路况下精度很低 仿真 高速公路、匝道口 [36] 2012 将驾驶人特征与驾驶人行为联系起来,并为变道模型的开发和实施收集参数 试验周期过长,且无法提供有关驾驶人意图和思维过程的详细信息 实车 城市道路 [38] 2012 考虑了驾驶人换道动机的时变特性,对换道概率进行了建模 无法捕捉到换道动机中的非线性 仿真 高速公路 [39] 2019 同时考虑了变道的安全性及其对整体交通流量的影响 所设计的离散模型在换道初期具有一定的偏差 仿真 单向双车道
下载: 导出CSV
表 4 基于人工智能的换道模型
Table 4. Lane changing model based on artificial intelligence
文献 年份 特点 存在的问题 实验环境 针对的路段 [40] 2014 采用神经网络模型来捕捉换道的复杂性 对于左换道和右换道的精度差距过大 仿真 单向3车道 [41] 2015 开发了反向传播神经网络模型来预测换道行为 掩盖了被试驾驶人行为特征的差异 实车 单向2车道 [42] 2020 构建了1个基于元胞自动机的微观仿真模型和1个可以快速决定换道的反向传播神经网络模型 未考虑到车辆间的交互行为,且忽略了乘坐舒适性 仿真 单向3车道 [43] 2022 提出了1种联合神经网络来模拟换道行为 模型应用场景受限 仿真 高速公路出口匝道 [44] 2020 结合智能交通系统,提出了1种基于深度学习和基于规则的混合模型 需要大量的训练数据,且可能会受到环境变化和传感器误差等因素的影响 仿真 单向2车道 [45] 2019 新模型将样本数据分为3种驱动风格:谨慎、稳定和激进 不同驾驶风格预测准确率有偏差 仿真 单向2车道 [46] 2020 结合传感器数据实现协同控制 模型较为复杂,训练时间比较长 仿真 单向2车道
下载: 导出CSV
表 5 基于博弈论的换道模型
Table 5. Lane changing model based on game theory
文献 年份 特点 存在的问题 实验环境 针对的路段 [47] 2019 通过使用更新的收益函数改进重复博弈模型。 过多关注驾驶人之间的互动,忽视了换道车辆本身状态 仿真 高速公路 [48] 2020 综合考虑换道成本、模型预测以及博弈结果得到目标车辆换道的最佳时间 忽略了车车通信、周围车辆运动轨迹以及换道决策的影响 仿真 高速公路 [49] 2020 为不同类型的决策博弈制定了支付函数,并根据周围车辆的状态信息定量计算每个决策的支付 所提出策略的收益只考虑了加速效用的影响 仿真 高速公路 [50] 2022 对换道意图进行客观量化,引入换道碰撞概率和换道动态风险系数 着重于交通环境中的动态因素,忽略了驾驶人自身特性的影响 仿真 单向双车道 [51] 2022 结合了车车通信技术,获取周围车辆的运动状态信息 模型较为复杂,训练时间比较长 仿真 单向双车道
下载: 导出CSV
-
[1] ZHENG Z D. Recent developments and research needs in modeling lane changing[J]. Transportation Research Part B: Methodological, 2014, 60(1): 16-32. [2] WINSUM W, WAARD D, BROOKHUIS K A. Lane change manoeuvres and safety margins[J]. Transportation Research Part F: Traffic Psychology and Behaviour, 1999, 2 (3): 139-149. doi: 10.1016/S1369-8478(99)00011-X [3] PANDE A, ABDELATY M. Assessment of freeway traffic parameters leading to lane-change related collisions[J]. Accident Analysis & Prevention, 2006, 38(5): 936-948. [4] ZHU S, AKSUN-GUVENC B. Trajectory planning of autonomous vehicles based on parameterized control optimization in dynamic on-road environments[J]. Journal of Intelligent and Robotic Systems, 2020, 100(4): 1055-1067. [5] 靳雅寓, 何赏璐, 苏宁, 等. 智能网联车专用车道对人工驾驶车的影响分析[C]. 2022世界交通运输大会. 武汉: 中国公路学会, 2022.JIN Y Y, HE S L, SU N, et al. Analysis of the influence of intelligent connected vehicle special lane on artificial driving vehicles[C]. 2022 World Transport Congress. Wuhan, CHINA: China Highway Society, 2022. (in Chinese) [6] YU H T, TSENG H E, LANGARI R. A human-like game theory-based controller for automatic lane changing[J]. Transportation Research Part C: Emerging Technologies, 2018, 88(1): 140-158. [7] 张羽翔, 何钢磊, 李鑫, 等. 基于参数描述的换道场景自动驾驶精确决策学习[J]. 同济大学学报(自然科学版), 2021, 49(增刊1): 132-140. doi: 10.11908/j.issn.0253-374x.22787ZHANG Y X, HE G L, LI X, et al. Precise decision-making learning for autonomous driving in lane change scenarios based on parameter description[J]. Journal of Tongji University (Natural Science Edition), 2021, 49(S1): 132-140. (in Chinese) doi: 10.11908/j.issn.0253-374x.22787 [8] 杨龙海, 罗沂, 徐洪. 基于GPS定位数据的高速公路换道特征分析与行为识别[J]. 北京交通大学学报, 2017, 41(3): 39-46. doi: 10.3969/j.issn.1672-8106.2017.03.005LUO L H, LUO Y, XU H. Highway lane change feature analysis and behavior recognition based on GPS positioning data[J]. Journal of Beijing Jiaotong University, 2017, 41(3): 39-46. (in Chinese) doi: 10.3969/j.issn.1672-8106.2017.03.005 [9] SUN D, ELEFTERIADOU L. Lane-changing behavior on urban streets: an "in-vehicle" field experiment-based study[J]. Computer-aided Civil and Infrastructure Engineering, 2012, 27(7): 525-542. doi: 10.1111/j.1467-8667.2011.00747.x [10] SCHMIDT K, BEGGIATO M, HOFFMANN HEINZ K, et al. A mathematical model for predicting lane changes using the steering wheel angle[J]. Journal of Safety Research, 2014, 49(1): 85-90. [11] AHMED I, KARR AF, ROUPHAIL NM, et al. Characterizing lane changing behavior and identifying extreme lane changing traits[J]. Transportation Letters the International Journal of Transportation Research, 2022, 15(5): 450-464. [12] WINSUM V, WAARD D, BROOKHUIS K. Lane change manoeuvres and safety margins[J]. Transportation Research Part F: Traffic Psychology and Behaviour, 1999, 2(3): 139-149. doi: 10.1016/S1369-8478(99)00011-X [13] MAI T, JIANG R, CHUNG E. A cooperative intelligent transport systems(C-ITS)-based lane-changing advisory for weaving sections[J]. Journal of Advanced Transportation, 2016, 50(5): 752-768. doi: 10.1002/atr.1373 [14] 张艺还. 车路协同环境下突发事件救援车辆路径规划算法研究[D]. 北京: 北京交通大学, 2019.ZHANG Y H. Research on route planning algorithm for emergency rescue vehicles under the environment of connected vehicle[D]. Beijing: Beijing Jiaotong University, 2019. (in Chinese) [15] ZHENG Z D. Recent developments and research needs in modeling lane changing[J]. Transportation Research Part B: Methodological, 2014, 60(1): 16-32. [16] CICCHINO J B. Effects of blind spot monitoring systems on police-reported lane-change crashes[J]. Traffic Injury Prevention, 2018, 19(6): 615-622. doi: 10.1080/15389588.2018.1476973 [17] YOO J, LANGARI R, A predictive perception model and control strategy for collision-free autonomous driving[J]. IEEE Transactions on Intelligent Transportation Systems, 2019, 20(11): 4078-4091. doi: 10.1109/TITS.2018.2880409 [18] NI J, HAN J W, LIU Z Q, et al. Situation assessment for lane-changing risk based on driver's perception of adjacent rear vehicles[J]. International Journal of Automotive Technology, 2020, 21(2): 427-439. doi: 10.1007/s12239-020-0040-9 [19] HUANG H Y, WANG J Q, FEI C, et al. A probabilistic risk assessment framework considering lane-changing behavior interaction[J]. Science China Information Sciences, 2020, 63 (9): 1-19. [20] JOO Y J, PARK H C, KHO S Y, et al. Reliability-based assessment of potential risk for lane-changing maneuvers[J]. Transportation Research Record, 2021, 2675(10): 161-173. doi: 10.1177/03611981211010800 [21] LI G F, YANG Y F, ZHANG T R, et al. Risk assessment based collision avoidance decision-making for autonomous vehicles in multi-scenarios[J]. Transportation Research Part C: Emerging Technologies, 2021, 122(1): 102820. [22] ARUN A, HAQUE M M, WASHINGTON S, et al. How many are enough? Investigating the effectiveness of multiple conflict indicators for crash frequency-by-severity estimation by automated traffic conflict analysis[J]. Transportation Research Part C: Emerging Technologies, 2022, 138(1): 103653. [23] JIANG R X, ZHU S Y, CHANG H G, et al. Determining an improved traffic conflict indicator for highway safety estimation based on vehicle trajectory data[J]. Sustainability, 2021, 13(16): 9278. doi: 10.3390/su13169278 [24] XING L, HE J, ABDEL M, et al. Examining traffic conflicts of upstream toll plaza area using vehicles' trajectory data[J]. Accident Analysis & Prevention, 2019, 125(1): 174-187. [25] XING L, HE J, LI Y, et al. Comparison of different models for evaluating vehicle collision risks at upstream diverging area of toll plaza[J]. Accident Analysis & Prevention, 2020, 135(1): 105343. [26] HARDING J, POWELL G, YOON R, et al. Vehicle-to-vehicle communications: readiness of V2V technology for application[M]. United States: National Highway Traffic Safety Administration, 2014. [27] REN S J, HE K M, GIRSHICK R, et al. Faster R-CNN: towards real-time object detection with region proposal networks[J]. Advances in Neural Information Processing Systems, 2015, 15(18): 137-146. [28] GIPPS P G. A model for the structure of lane-changing decisions[J]. Transportation Research Part B: Methodological, 1986, 20(5): 403-414. doi: 10.1016/0191-2615(86)90012-3 [29] YANG Q I, KOUTSOPOULOS H N. A microscopic traffic simulator for evaluation of dynamic traffic management systems[J]. Transportation Research Part C: Emerging Technologies, 1996, 4(3): 113-129. doi: 10.1016/S0968-090X(96)00006-X [30] DING J Y, LI L, PENG H, et al. A rule-based cooperative merging strategy for connected and automated vehicles[J]. IEEE Transactions on Intelligent Transportation Systems, 2019, 21(8): 3436-3446. [31] JIN C J, KNOOP V L, LI D W, et al. Discretionary lane-changing behavior: empirical validation for one realistic rule-based model[J]. Transportmetrica A-Transport Science, 2019, 15 (2): 224-262. [32] SHAO Y, DENG X F, SONG J X, et al. Lane-changing model of intelligent connected vehicle considering the factor of turn signal[J]. Journal of Advanced Transportation, 2022, 11 (1): 4357954. [33] ZHANG J Y, LIAO Y P, HAN J, et al. Lane changing models based on artificial potential field[C]. IEEE 2017 Chinese Automation Congress, Jinan, CHINA: IEEE, 2017. [34] AHMED K I, BENAKIVA M E, KOUTSOPOULOS, et al. Models of freeway lane changing and gap acceptance behavior[J]. Transportation and Traffic Theory, 1996, 1(13): 501-515. [35] TOLEDO T, KOUTSOPOULOS H. BEN-AKIVA M. Modeling integrated lane-changing behavior[J]. Transportation Research Record Journal of the Transportation Research Board, 2003, 1(1857): 30-38. [36] SUN D J, ELEFTERIADOU L. Lane-changing behavior on urban streets: an"in-vehicle"field experiment-based study[J]. Computer Aided Civil and Infrastructure Engineering, 2012, 27(7): 525-542. [37] SUN D J. A lane-changing model for urban arterial streets[D]. Gainesville: University of Florida, 2009. [38] SINGH K, LI B B. Discrete choice modelling for traffic densities with lane-change behaviour[C]. 8th International Conference on Traffic and Transportation Studies, Beijing, CHINA: IEEE, 2012. [39] WANG Z H, CUI S M, YU T Y. Automatic lane change control for intelligent connected vehicles[C]. 4th International Conference on Electromechanical Control Technology and Transportation, Guilin, CHINA: IEEE, 2019. [40] ZHENG J, SUZUKI K, FUJITA M. Predicting driver's lane-changing decisions using a neural network model[J]. Simulation Modelling Practice and Theory, 2014, 42(1): 73-83. [41] PENG J S, GUO Y S, FU R, et al. Multi-parameter prediction of drivers' lane-changing behaviourwith neural network model[J]. Applied Ergonomics, 2015, 50(1): 207-217. [42] MA K, WANG H. Lane-changing decision model for connected and automated vehicle based on back-propagation neural network[C]. International Conference on Transportation and Development, Washington, D. C., USA: IEEE, 2020. [43] DONG C Y, LIU Y J, WANG H, et al. Modeling lane-changing behavior based on a joint neural network[J]. Machines, 2022, 10(2): 109-126. [44] LI Y M, ZHANG J, SUN H. Lane change decision-making for autonomous vehicles based on a hybrid model of deep learning and rule-based methods[J]. IEEE Transactions on Intelligent Transportation Systems, 2020, 21(2): 702-712. [45] REN G Q, ZHANG Y, LIU H, et al. A new lane-changing model with consideration of driving style[J]. International Journal of Intelligent Transportation Systems Research, 2019, 17(3): 181-189. [46] CHEN J Y, FENG Y H, YAN M Y. A deep reinforcement learning-based lane change system for autonomous vehicles[J]. IEEE Transactions on Intelligent Transportation Systems, 2020, 21(5): 1980-1991. [47] KANG K, RAKHA H A. A repeated game freeway lane changing model[J]. Sensors, 2020, 20(6): 1554. [48] DING N, MARIA A, MENG X H, et al. Mandatory lane change strategy in vanet based on coordinated stackelberg game model[C]. 2020 Chinese Control and Decision Conference, Hefei, CHINA: IEEE, 2021. [49] ZHENG Y, DING W T, RAN B, et al. Coordinated decisions of discretionary lane change between connected and automated vehicles on freeways: a game theory-based lane change strategy[J]. IET Intelligent Transport Systems, 2020, 14(13): 1864-1870. [50] QU D Y, ZHANG K K, SONG H, et al. Analysis and modeling of lane-changing game strategy for autonomous driving vehicles[J]. IEEE Access, 2022, 10(1): 69531-69542. [51] JI Y P, ZHANG J, WU K R, et al. Optional lane-changing of intelligent vehicles based on vehicle-to-vehicle communication[J]. Journal of Command and Control, 2022, 7(4): 389-396. -

 点击查看大图
点击查看大图
计量
- 文章访问数: 1148
- HTML全文浏览量: 742
- PDF下载量: 120
- 被引次数: 0