

Trajectory Prediction and Intention Identification of Ships in Confluence Waters
-
摘要: 针对典型水上交通场景交汇水域,研究了1种数据驱动的船舶轨迹预测与航行意图识别方法。设计CNN+LSTM组合神经网络,通过学习交汇水域船舶的历史轨迹,以CNN+LSTM网络为编码器提取其通航环境及船舶航行时空特征,LSTM与全连接层为解码器同步输出未来时段内船舶轨迹序列和航路选择,从而形成船舶轨迹与航行意图识别模型。同时,引入Dropout网络结构描述该模型的预测不确定性,采用随机关闭CNN+ LSTM核心网络部分神经单元的方式,以相同轨迹序列作为输入获取多组相近的预测结果,根据其统计均值与方差对船舶轨迹预测的不确定性进行量化。以美国沿海某交汇水域公开AIS数据为对象开展实验,创建了该交汇水域船舶航行轨迹数据集,以输入时长60 min,采样频率3 min作为输入条件,Dropout值取0.5,实验结果表明:所提方法对未来60 min时段内的轨迹预测误差为3.946 n mile,航行意图识别准确率达87%,不确定性估计覆盖率达85.7%。与LSTM预测方法相比,当船舶操纵性发生改变时,所提CNN+LSTM模型的轨迹预测误差降低了31.6%,而且兼具船舶航行意图识别及预测不确定性估计能力,有利于智能航行与海事监管技术发展。Abstract: A data-driven method is proposed for predicting ship trajectory and identifying sailing intention for typical confluence waters. A CNN+LSTM combined neural network is designed by learning the historical trajectories of the ships in the confluence waters. Using CNN+LSTM as an encoder, the spatio-temporal characteristics of the navigable environment and ship sailing are extracted. The decoder, which is composed of the LSTM and full connection layer, synchronously outputs the trajectory sequence and route selection of the ship in the future period. Moreover, the Dropout layer is introduced to describe the prediction uncertainty of the proposed model. Take the same trajectory sequence as the input, multiple groups of similar prediction results are obtained by randomly disabling several neural units of the CNN+LSTM network. Based on the statistical mean and variance of the prediction results, the prediction uncertainty of ship trajectory can be estimated. A dataset is created based on the open AIS data of confluence water in the coast of the United States. The input conditions are as follows: the input time is 60 min, the sam-pling frequency is 3 min, and the dropout parameter is 0.5. The results of the proposed model show that the error of trajectory prediction is 3.946 n mile for the next 60 min. The recognition accuracy of sailing intention is 87%. And the coverage rate of uncertainty estimation is 85.7%. Compared with other LSTM-based prediction methods, the trajectory prediction error of the proposed model is reduced by 31.6% when the ship's maneuverability changes. Furthermore, the proposed CNN+LSTM model has the ability of identifying ships' sailing intentions and estimating the prediction uncertainties, which is conducive to the development of intelligent navigation and intelligent maritime supervision technology.
-

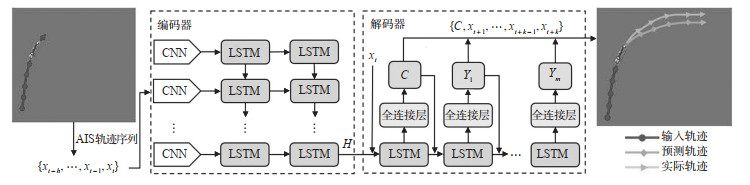
图 2 基于CNN+LSTM组合网络的船舶轨迹预测与航行意图识别模型
Figure 2. Ship trajectory prediction and intention recognition model based on CNN+LSTM combined network

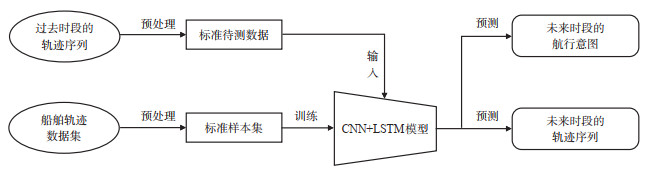
图 3 船舶轨迹预测与航行意图识别方法流程
Figure 3. Theflow of the ship trajectory prediction and intention recognition method

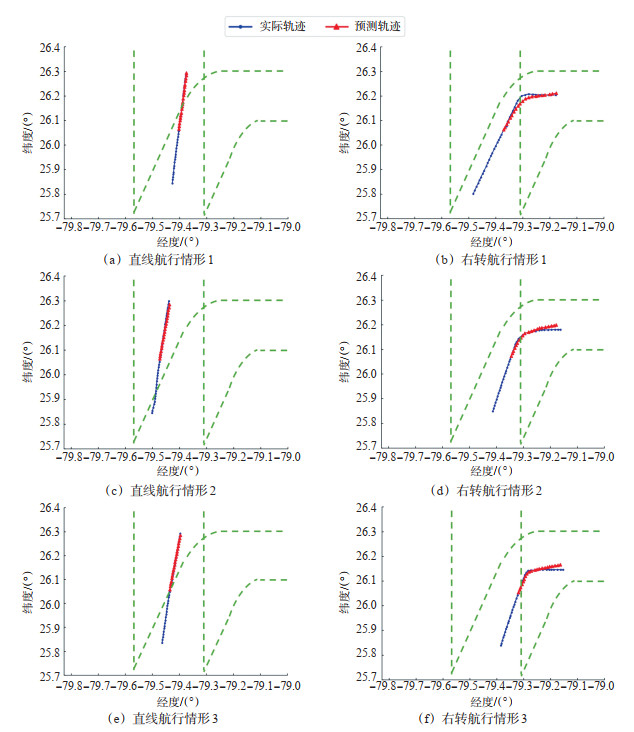
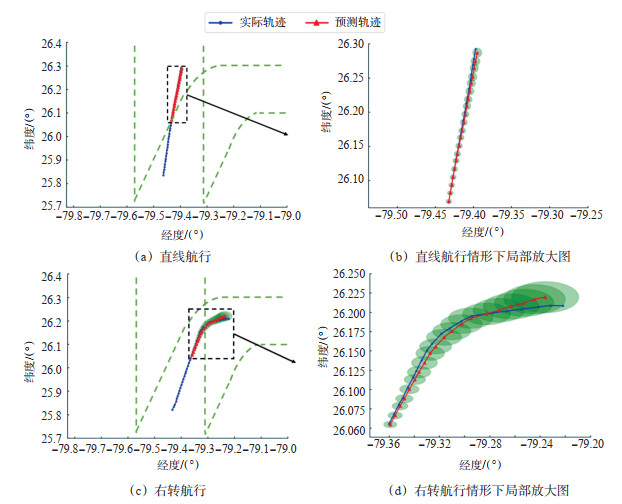
图 4 以前60 min时长为输入,预测未来60 min时段内的船舶轨迹
Figure 4. Predicting the ship trajectories of next 60 min with the input of previous 60 min

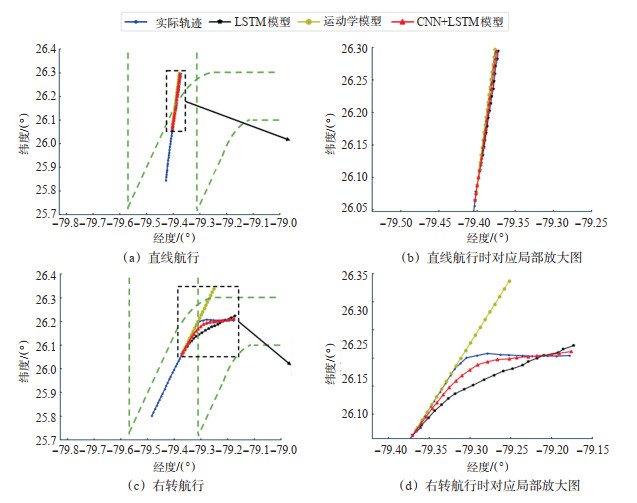
图 5 LSTM+CNN、LSTM、运动预测方法对比
Figure 5. Comparison between LSTM+CNN、LSTM、motion-based predictions

图 6 船舶轨迹预测不确定性估计(Dropout = 0.5)
Figure 6. Uncertainty estimation of ship trajectory prediction(Dropout = 0.5)
表 1 不同采样频率输入条件下的轨迹预测误差
Table 1. Trajectory prediction errors using different sampling frequenciesas inputs
采样频率/min t1时刻误差/n mile t2时刻误差/n mile t3时刻误差/n mile t4时刻误差/n mile t5时刻误差/n mile 预测误差/n mile 1 0.463 1 0.759 8 1.129 3 1.595 3 2.196 5 6.640 5 3 0.262 0 0.453 6 0.669 7 0.918 2 1.208 8 3.946 0 6 0.539 7 0.863 3 1.232 9 1.604 7 2.244 3 7.034 0 12 0.813 5 1.107 3 1.412 0 2.187 5 2.937 0 8.560 0  下载: 导出CSV
下载: 导出CSV
表 2 不同时长输入条件下的轨迹预测误差
Table 2. Trajectory prediction errors using different durations as inputs
输入时长/min t1时刻误差/n mile t2时刻误差/n mile t3时刻误差/n mile t4时刻误差/n mile t5时刻误差/n mile 预测误差/n mile 15 1.105 2 1.576 8 2.228 4 3.258 1 4.539 6 15.534 30 0.813 6 1.328 4 1.933 2 2.638 8 3.481 2 12.978 45 0.565 2 0.878 4 1.326 7 1.976 4 2.746 8 8.946 60 0.262 0 0.453 6 0.669 7 0.918 2 1.208 8 3.946
下载: 导出CSV
表 3 交汇水域船舶航行意图识别混淆矩阵
Table 3. Confusion matrix of intention identification for ships in confluence waters
实际 预测 总计 直线航行 右转航行 直线航行 49 8 57 右转航行 5 38 43 总计 54 36 100
下载: 导出CSV
表 4 不同Dropout值条件下的轨迹预测不确定性估计及覆盖率
Table 4. Uncertaintyestimation and coverage rate of trajectory prediction with different Dropout values
Dropout值 t1时刻范围/n mile2 t2时刻范围/n mile2 t3时刻范围/n mile2 t4时刻范围/n mile2 t5时刻范围/n mile2 不确定性范围/n mile2 覆盖率/% 0.3 0.390 4 0.5981 0.954 5 1.595 5 2.923 7 1.292 4 75.4 0.4 0.598 8 0.809 9 1.430 2 3.203 9 4.632 8 2.755 1 80.1 0.5 0.965 1 1.449 7 2.351 3 4.027 6 7.408 8 3.940 5 85.7 0.6 1.800 1 2.517 7 3.633 0 6.205 9 9.390 3 5.069 4 79.6 0.7 2.300 4 3.322 3 4.878 9 7.029 5 10.762 3 6.658 7 71.7
下载: 导出CSV
-
[1] 严新平, 褚端峰, 刘佳仑, 等. 智能交通发展的现状、挑战与展望[J]. 交通运输研究, 2021, 7(6): 2-10+22. https://www.cnki.com.cn/Article/CJFDTOTAL-JTBH202106001.htmYAN X P, CHU D F, LIU J L, et al. Current situation, challenge and prospect of intelligent transportation development[J]. Transportation Research, 2021, 7(6): 2-10+22. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-JTBH202106001.htm [2] 严新平, 李晨, 刘佳仑, 等. 新一代航运系统体系架构与关键技术研究[J]. 交通运输系统工程与信息, 2021, 21(5): 22-29+76. https://www.cnki.com.cn/Article/CJFDTOTAL-YSXT202105004.htmYAN X P, LI C, LIU J L, et al. Research on architecture and key technologies of new generation shipping system[J]. Transportation System Engineering and Information, 2021, 21(5): 22-29+76. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-YSXT202105004.htm [3] 马吉林, 谢朔. 船舶智能航行及关键技术最新发展[J]. 中国船检, 2020(11): 52-58. doi: 10.3969/j.issn.1009-2005.2020.11.024MA J L, XIE S. The latest development of ship intelligent navigation and key technology[J]. China Ship Inspection, 2020(11): 52-58. (in Chinese) doi: 10.3969/j.issn.1009-2005.2020.11.024 [4] 张笛, 赵银祥, 崔一帆, 等. 智能船舶的研究现状可视化分析与发展趋势[J]. 交通信息与安全, 2021, 39(1): 7-16+34. doi: 10.3963/j.jssn.1674-4861.2021.01.002ZHANG D, ZHAO Y X, CUI Y F, et al. A visualization analysis and development trend of intelligent ship studies[J]. Journal of Transport Information and Safety, 2021, 39(1): 7-16+34. (in Chinese) doi: 10.3963/j.jssn.1674-4861.2021.01.002 [5] 吴文祥, 初秀民, 柳晨光, 等. 基于模型预测控制的船舶纵向航速协同控制方法[J]. 交通信息与安全, 2021, 39(1): 52-63. doi: 10.3963/j.jssn.1674-4861.2021.01.0007WU W X, CHU X M, LIU C G, et al. A coordinated control method of longitudinal ship speed based on model predictive control[J]. Journal of Transport Information and Safety, 2021, 39(1): 52-63. (in Chinese) doi: 10.3963/j.jssn.1674-4861.2021.01.0007 [6] 赵帅兵, 唐诚, 梁山, 等. 基于改进卡尔曼滤波的控制河段船舶航迹预测[J]. 计算机应用, 2012, 32(11): 3247-3250. https://www.cnki.com.cn/Article/CJFDTOTAL-JSJY201211074.htmZHAO S B, TANG C, LIANG S, et al. Ship track prediction in controlled reach based on improved Kalman filter[J]. Computer Applications, 2012, 32(11): 3247-3250. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-JSJY201211074.htm [7] 徐铁, 蔡奉君, 胡勤友, 等. 基于卡尔曼滤波算法船舶AIS轨迹估计研究[J]. 现代电子技术, 2014, 37(5): 97-100+104. https://www.cnki.com.cn/Article/CJFDTOTAL-XDDJ201405030.htmXU T, CAI F J, HU Q Y, et al. Research on ship AIS trajectory estimation based on Kalman filter algorithm[J]. Modern Electronic Technology, 2014, 37(5): 97-100+104. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-XDDJ201405030.htm [8] 姜佰辰, 关键, 周伟, 等. 基于多项式卡尔曼滤波的船舶轨迹预测算法[J]. 信号处理, 2019, 35(5): 741-746. https://www.cnki.com.cn/Article/CJFDTOTAL-XXCN201905002.htmJIANG B C, GUAN J, ZHOU W, et al. Ship trajectory prediction algorithm based on polynomial Kalman filter[J]. Signal Processing, 2019, 35(5): 741-746. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-XXCN201905002.htm [9] WIEST J, HOFFKEN M, KRESEL U, et al. Probabilistic trajectory prediction with Gaussianmixture models[C]. 4th Intelligent Vehicles Symposium, Madrid, Spain: IEEE, 2012. [10] 乔少杰, 金琨, 韩楠, 等. 1种基于高斯混合模型的轨迹预测算法[J]. 软件学报, 2015, 26(5): 1048-1063.QIAO S J, JIN K, HAN N, et al. A trajectory prediction algorithm based on Gaussian mixture model[J]. Journal of Software, 2015, 26(5): 1048-1063. (in Chinese) [11] WANG Q Y, ZHANG Z L, WANG Z Y, et al. The trajectory prediction of spacecraft by grey method[J]. Measurement Science and Technology, 2016, 27(8): 085011. http://smartsearch.nstl.gov.cn/paper_detail.html?id=11f0aa2e92ca28cd884174c657e79ecc [12] 周艳萍, 曾宪群, 蔡玲. 改进灰色模型的船舶航行轨迹自动预测研究[J]. 舰船科学技术, 2021, 43(20): 34-36. https://www.cnki.com.cn/Article/CJFDTOTAL-JCKX202120013.htmZHOU Y P, ZENG X Q, CAI L. Research on automatic prediction of ship navigation trajectory based on improved grey model[J]. Ship Science and Technology, 2021, 43(20): 34-36. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-JCKX202120013.htm [13] 李万高, 赵雪梅, 孙德厂. 基于改进贝叶斯方法的轨迹预测算法研究[J]. 计算机应用, 2013, 33(7): 1960-1963. https://www.cnki.com.cn/Article/CJFDTOTAL-JSJY201307044.htmLI W G, ZHAO X M, SUN D C. Research on trajectory prediction algorithm based on improved Bayesian method[J]. Computer Applications, 2013, 33(7): 1960-1963. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-JSJY201307044.htm [14] RONG H, TEIXEIRA A P, SOARES C G. Ship trajectory uncertainty prediction based on a Gaussian process model[J]. Ocean Engineering, 2019, 182(15): 499-511. http://www.sciencedirect.com/science/article/pii/S0029801818315427 [15] ZHOU H, CHEN Y J, ZHANG S M. Ship trajectory prediction based on BP neural network[J]. Journal on Artificial Intelligence, 2019, 1(1): 29-36. [16] 甄荣, 金永兴, 胡勤友, 等. 基于AIS信息和BP神经网络的船舶航行行为预测[J]. 中国航海, 2017, 40(2): 6-10. https://www.cnki.com.cn/Article/CJFDTOTAL-ZGHH201702002.htmZHEN R, JIN Y X, HU Q Y, et al. Prediction of ship navigation behavior based on AIS information and BP neural network[J]. China Navigation, 2017, 40(2): 6-10. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-ZGHH201702002.htm [17] SUO Y F, CHEN W K, CLAMARAMUNT C, et al. A ship trajectory prediction framework based on a recurrent neural network[J]. Sensors, 2020, 20(18): 5133. http://www.xueshufan.com/publication/3084233918 [18] 权波, 杨博辰, 胡可奇, 等. 基于LSTM的船舶航迹预测模型[J]. 计算机科学, 2018, 45(增刊2): 126-131. https://www.cnki.com.cn/Article/CJFDTOTAL-JSJA2018S2023.htmQUAN B, YANG B C, HU K Q, et al. Ship track prediction model based on LSTM[J]. Computer Science, 2018, 45(S2): 126-131. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-JSJA2018S2023.htm [19] PARK J, JEONG J, PARK Y. Ship trajectory prediction based on Bi-LSTM using spectral-clustered AIS data[J]. Journal of Marine Science and Engineering, 2021, 9(9): 1037. http://agris.fao.org/agris-search/search.do?recordID=CH2022112449 [20] GAO D W, ZHU Y S, ZHANG J F, et al. A novel MP-LSTM method for ship trajectory prediction based on AIS data[J]. Ocean Engineering, 2021(228): 108956. http://www.sciencedirect.com/science/article/pii/S0029801821003917 [21] 季学武, 费聪, 何祥坤, 等. 基于LSTM网络的驾驶意图识别及车辆轨迹预测[J]. 中国公路学报, 2019, 32(6): 34-42. https://www.cnki.com.cn/Article/CJFDTOTAL-ZGGL201906004.htmJI X W, FEI C, HE X K, et al. Driving intention recognition and vehicle trajectory prediction based on LSTM network[J]. Chinese Journal of Highway, 2019, 32(6): 34-42. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-ZGGL201906004.htm [22] 刘姗姗, 马社祥, 孟鑫, 等. 基于CNN和Bi-LSTM的船舶航迹预测[J]. 重庆理工大学学报(自然科学), 2020, 34(12): 196-205. https://www.cnki.com.cn/Article/CJFDTOTAL-CGGL202012025.htmLIU S S, MA D X, MENG X, et al. Prediction model of ship trajectory based on CNN and Bi-LSTM[J]. Journal of Chongqing University of Technology (Natural Science), 2020, 34(12): 196-205. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-CGGL202012025.htm [23] LIU X, YUAN H W, XIAO C S, et al. Hybrid-driven vessel trajectory prediction based on uncertainty fusion[J]. Ocean Engineering, 2022(248): 110836. http://arxiv.org/abs/2201.07606 -

 点击查看大图
点击查看大图
计量
- 文章访问数: 1624
- HTML全文浏览量: 811
- PDF下载量: 124
- 被引次数: 0