

A Collision Risk Model for Small UAVs Based on Velocity Random Distribution in Low-altitude Airspace
-
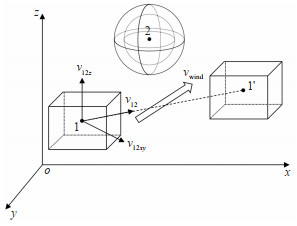
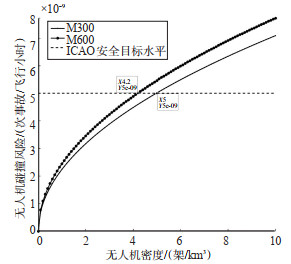
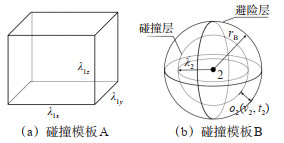
摘要: 碰撞风险是评价航空器运行安全性、确定航空器运行条件的关键指标。针对低空空域小型无人机数量增多导致空域安全隐患增加的问题,提出了1种基于速度随机分布的碰撞风险评估模型,确定了无人机在空域中的安全运行的条件。根据低空空域小型无人机操纵性灵活的特点,提出了针对低空空域小型无人机不同飞行动作的碰撞模板:为自由飞行的无人机设置符合实际运行的含碰撞层和避险层的双层球体碰撞模板;为沿固定路径飞行的无人机设置以机身尺寸为参考的长方体碰撞模板。考虑无人机飞行方向和速度变化快的特点,将传统无人机速度的线性分布模型改进为随机分布模型,计算无人机的相对运动关系,再利用速度矢量法计算碰撞模板扫过的空间体积。引入无人机动态定位误差、速度误差,在传统人机可靠性的基础上,建立基于速度随机分布的低空空域小型无人机碰撞风险评估模型。选取大疆M300和M600这2种型号的无人机作为验证机型,运用Matlab软件模拟特定空域场景,并分析碰撞风险与小型无人机密度的关系。通过仿真可以发现:空域内碰撞风险与无人机密度呈正相关关系;根据国际民用航空组织空域安全标准,2种验证机型安全运行的最大密度分别为4.2架/km3和5.0架/km3;在满足安全运行条件的前提下,采用新的碰撞风险评估模型,空域容纳2种无人机的数量的密度上限可分别提高106.9%和88.7%。实验结果表明,新的碰撞风险模型更加符合小型无人机运行特征,未来可以用于提升空域内无人机容量、提升空域利用率和无人机运行效率。Abstract: Collision risk is a key indicator to evaluate the safety of aircraft and the main factor to determine the aircraft's operating conditions in the airspace. To handle the potential conflict due to the increasing number of small Unmanned Aerial Vehicles (UAVs) in low-altitude airspace, a novel collision risk model based on velocity random distribution is developed to determine the safe operating conditions of UAVs in low-altitude airspaces. New collision templates for UAVs are proposed, incorporating the maneuverability and flexibility of small UAVs. For a free-flying UAV, a double-layer sphere collision template is developed, including a collision layer and an avoidance layer. For a UAV following a fixed path, a cuboid collision template is proposed, incorporating the fuselage size of the UAV. Considering the rapid change of course and speed of the UAV, a stochastic velocity model is adopted instead of a linear model, and the relative velocity between UAVs is calculated, which is used to determine the space swept by the collision template. Considering positioning errors and speed errors of UAVs, the collision risk model based on velocity random distribution is proposed for UAVs in low-altitude airspace. Two types of UAVs, DJI M300 and M600, are selected as verification models. The Matlab software is used to simulate specific airspace scenarios. Then the relationships between collision risk and the density of small UAVs are analyzed. The simulations show that the collision risk in the airspace is positively correlated with the density of UAVs. According to the safety standards from the International Civil Aviation Organization, the maximum densities for the safe operation of the two types of verification models are 4.2 aircraft/km3 and 5.0 aircraft/km3, respectively. Under the premise of satisfying the safe conditions, the proposed model can increase the upper limit of the density of the two types of UAVs in the airspace by 106.9% and 88.7%, respectively. The results reveal that the proposed model is more consistent with the operating characteristics of UAVs. It can be used to improve the utilization of airspace, increase the capacity of UAVs in the airspace, and improve their operational efficiency in the future.
-
表 1 M600无人机相关参数
Table 1. Related parameters of UAV M600
参数 取值 参数 取值 参数 取值 Vmax/(m/s) 18 μv 0 λx/m 1.668 Vmin/(m/s) 3 σg2 6.6 λy/m 1.518 μg 0 σv2 0.072 3 λz/m 0.759  下载: 导出CSV
下载: 导出CSV
表 2 M300无人机相关参数
Table 2. Related parameters of UAV M300
参数 取值 参数 取值 参数 取值 Vmax/(m/s) 23 μv 0 λx/m 0.81 Vmin/(m/s) 5 σg2 6.6 λy/m 0.67 μg 0 σv2 0.057 5 λz/m 0.43
下载: 导出CSV
表 3 模型计算相关参数
Table 3. Parameters related to model calculations
参数 取值 k1 0.900 00 k2 0.000 85 k3 0.903 80
下载: 导出CSV
表 4 结果对比分析
Table 4. Comparative analysis of results
模型 碰撞模板 无人机速度分布 机型 碰撞风险与无人机密度关系 最大安全密度/(架/km3) 有人机模型 长方体 线性分布 M600 线性 2.03 M300 线性 2.65 改进无人机模型 长方体+双层球体 随机分布 M600 非线性 4.2 M300 非线性 5.0
下载: 导出CSV
-
[1] 王智显, 张雁平, 詹雨飞. 面向低慢小无人机的SKDC-LDS技术[J]. 电子信息对抗技术, 2021, 36(3): 72-76+104. doi: 10.3969/j.issn.1674-2230.2021.03.015WANG Z X, ZHANG Y P, ZHAN Y F. The soft-kill distributed coordination layer defense system technology for the low-slow-small drone[J]. Electronic Information Warfare Technology, 2021, 36(3): 72-76+104. (in Chiness) doi: 10.3969/j.issn.1674-2230.2021.03.015 [2] DURRANT H, ROY N, ABBEEL P. Unmanned aircraft collision avoidance using continuous-state POMDPs[C]. Robotics: Science and Systems VⅡ, Los Angeles, CA, USA: University of Southern California, 2011. [3] TYAGI A, ZHANG Y, TOUSSAINT S, et al. Strategies to model system risk using UAS safety analysis model (USAM)[C]. 16th AIAA Aviation Technology, Integration, and Operations Conference, Dallas, TX, USA: AIAA, 2015. [4] LANCOVS D, DMITRIJS H. Building, verifying and validating a collision avoidance model for unmanned aerial vehicles[J]. Procedia Engineering, 2017, 178(5): 155-161. http://www.sciencedirect.com/science/article/pii/S1877705817300826 [5] ZHANG Z Y, ZHANG J, WANG P, et al. Research on operation of UAVs in non-isolated airspace[J]. Computers, Materials & Continua, 2018, 57(1): 151-166. http://www.zhangqiaokeyan.com/academic-journal-foreign_other_thesis/0204112535702.html [6] GAN X, WU Y, LIU P, et al. Dynamic collision avoidance zone modeling method based on UAV emergency collision avoidance trajectory[C]. 2020 IEEE International Conference on Artificial Intelligence and Information Systems(ICAⅡS), Fukuoka, Japan: IEEE, 2020. [7] 刘畅, 王宏伦, 姚鹏, 等. 面向空中威胁的无人机动态碰撞区建模与分析[J]. 北京航空航天大学学报, 2015, 41(7): 1231-1238. https://www.cnki.com.cn/Article/CJFDTOTAL-BJHK201507012.htmLIU C, WANG H L, YAO P, et al. Modeling and analysis of dynamic collision region for UAV avoiding aerial intruders[J]. Journal of Beijing University of Aeronautics and Astronautics, 2015, 41(7): 1231-1238. (in Chiness) https://www.cnki.com.cn/Article/CJFDTOTAL-BJHK201507012.htm [8] 高俊杰. 无人机安全飞行风险评估研究[D]. 四川广汉: 中国民用航空飞行学院, 2018.GAO J J. Safety flight risk assessment study of unmanned aircraft[D]. Guanghan, Sichuan: Civil Aviation Flight University of China, 2018. (in Chiness) [9] 贺强, 徐艺, 马尧. 基于FCM的无人机飞行安全风险评估[J]. 民航学报, 2018, 2(1): 31-34+21. https://www.cnki.com.cn/Article/CJFDTOTAL-MHXE201801009.htmHE Q, XU Y, MA Y. UAS flight safety risk assessment based on fuzzy cognitive maps[J]. Journal Of Civil Aviation, 2018, 2 (1): 31-34+21. (in Chiness) https://www.cnki.com.cn/Article/CJFDTOTAL-MHXE201801009.htm [10] 杨新湦, 任治. 基于尾涡强度的无人机与民机纵向安全间隔评估研究[J]. 中国安全生产科学技术, 2018, 14(10): 64-69. https://www.cnki.com.cn/Article/CJFDTOTAL-LDBK201810010.htmYANG X S, REN Z. Research on assessment of longitudinal safety separation between UAV and civil aircraft based on trailing vortex intensity[J]. Journal of Safety Science and Technology, 2018, 14(10): 64-69. (in Chiness) https://www.cnki.com.cn/Article/CJFDTOTAL-LDBK201810010.htm [11] 邓力. 无人机与民航客机碰撞概率研究[J]. 南京理工大学学报, 2019, 43(1): 122-128. https://www.cnki.com.cn/Article/CJFDTOTAL-NJLG201901017.htmDENG L. Research of collision probability of unmanned aerial vehicles and civil airplane[J]. Journal of Nanjing University of Science and Technology, 2019, 43(1): 122-128. (in Chiness) https://www.cnki.com.cn/Article/CJFDTOTAL-NJLG201901017.htm [12] 潘卫军, 陈佳炀, 张智巍, 等. 管制空域内无人机与有人机侧向碰撞风险研究[J]. 计算机与现代化, 2020(3): 1-5. https://www.cnki.com.cn/Article/CJFDTOTAL-JYXH202003003.htmPAN W J, CHEN J Y, ZHANG Z W, et al. Lateral collision risk evaluation between unmanned aerial vehicle and manned aircraft in controlled airspace[J]. Computer and Modernization. 2020(3): 1-5. (in Chiness) https://www.cnki.com.cn/Article/CJFDTOTAL-JYXH202003003.htm [13] 赵建华, 王华伟, 严晓婧, 等. 无人机与运输类飞机碰撞风险研究[J]. 舰船电子工程, 2021, 41(1): 26-29+76. doi: 10.3969/j.issn.1672-9730.2021.01.007ZHAO J H, WANG H W, YAN X J, et al. Research on collision risk between drones and transport aircraft[J]. Ship Electronic Engineering 2021, 41(1): 26-29+76. (in Chiness) doi: 10.3969/j.issn.1672-9730.2021.01.007 [14] 王莉莉, 阳杰. 基于位置误差概率模型的物流无人机安全间隔评估方法研究[J]. 中国安全生产科学技术, 2022, 18 (3): 184-192. https://www.cnki.com.cn/Article/CJFDTOTAL-LDBK202203028.htmWANG L L, YANG J. Research on assessment method of safety separation for logistics UAVs based on position error probability model[J]. Journal of Safety Science and Technology, 2022, 18(3): 184-192. (in Chiness) https://www.cnki.com.cn/Article/CJFDTOTAL-LDBK202203028.htm [15] 高扬, 刘单单. 低空开放后终端区航空器碰撞风险模型研究[J]. 中国安全科学报, 2014, 24(6): 141-145. https://www.cnki.com.cn/Article/CJFDTOTAL-ZAQK201406024.htmGAO Y, LIU D D. Research on model for aircrafts collision risk in terminal area after low altitude open[J]. China Safety Science Journla, 2014, 24(6): 141-145. (in Chiness) https://www.cnki.com.cn/Article/CJFDTOTAL-ZAQK201406024.htm [16] 赵建华. 考虑无人机运行的航空安全风险分析研究[D]. 南京: 南京航空航天大学, 2020.ZHAO J H. Risk analysis of aviation safety considering UAV operation[D]. Nanjing: Nanjing University of Aeronautics and Astronautics, 2020. (in Chiness) [17] 姜黎黎, 王保国, 刘淑艳, 等. 人的可靠性研究中的定量分析方法及其评价[C]. 人-机-环境系统工程研究进展. 北京: 中国系统工程学会, 2005.JIANG L L, WANG B G, LIU S Y, et al. Quantitative analysis method and its evaluation in human reliability research[C]. Progress in Human-Machine-Environmental Systems Engineering, Beijing: Systems Engineering Society of China, 2005. (in Chiness) [18] 钟若嵋, 文小航, 徐晨晨. 基于高分辨率模式的京津冀地区无人机航路风向风速模拟分析[J]. 地理科学进展, 2021, 40 (9): 1528-1539. https://www.cnki.com.cn/Article/CJFDTOTAL-DLKJ202109009.htmZHONG R M, WEN X H, XU C C. Simulation and analysis of wind speed and direction of unmanned aerial vehicle route in the Beijing-Tianjin-Hebei region based on high resolution model[J]. Progress in Geography, 2021, 40(9): 1528-1539. (in Chiness) https://www.cnki.com.cn/Article/CJFDTOTAL-DLKJ202109009.htm [19] 张宏宏, 甘旭升, 李昂, 等. 基于速度障碍法的无人机避障与航迹恢复策略[J]. 系统工程与电子技术, 2020, 42(8): 1759-1767. https://www.cnki.com.cn/Article/CJFDTOTAL-XTYD202008017.htmZHANG H H, GAN X S, LI A, et al. UAV obstacle avoidance and track recover strategy based on velocity obstacle method[J]. Systems Engineering and Electronics, 2020, 42 (8): 1759-1767. (in Chiness) https://www.cnki.com.cn/Article/CJFDTOTAL-XTYD202008017.htm [20] 史校川, 金镭, 王春生, 等. 美国军民用无人机系统事故案例分析[J]. 航空标准化与质量, 2017(3): 46-49. https://www.cnki.com.cn/Article/CJFDTOTAL-HKBZ201703012.htmSHI X C, JIN L, WANG C S, et al. A case study of the accidents of UAVs used by The United States[J]. Aeronautic Standardization & Quality, 2017(3): 46-49. (in Chiness) https://www.cnki.com.cn/Article/CJFDTOTAL-HKBZ201703012.htm -

 点击查看大图
点击查看大图
图(3) / 表(4)
计量
- 文章访问数: 1569
- HTML全文浏览量: 594
- PDF下载量: 719
- 被引次数: 0