| Citation: | LU Guangquan, LI Yilin, LI Penghui. Simulation of Vehicle Following Platoons at Cut-in Scenarios Based on Natural Driving Data[J]. Journal of Transport Information and Safety, 2021, 39(5): 59-67. doi: 10.3963/j.jssn.1674-4861.2021.05.008

|
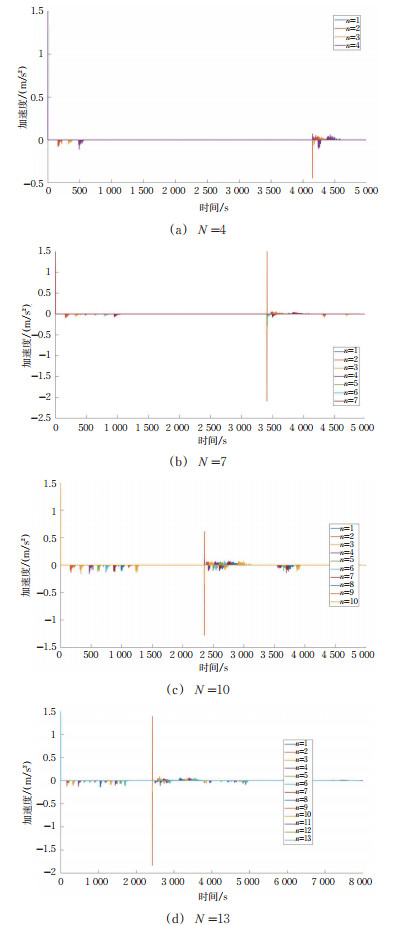
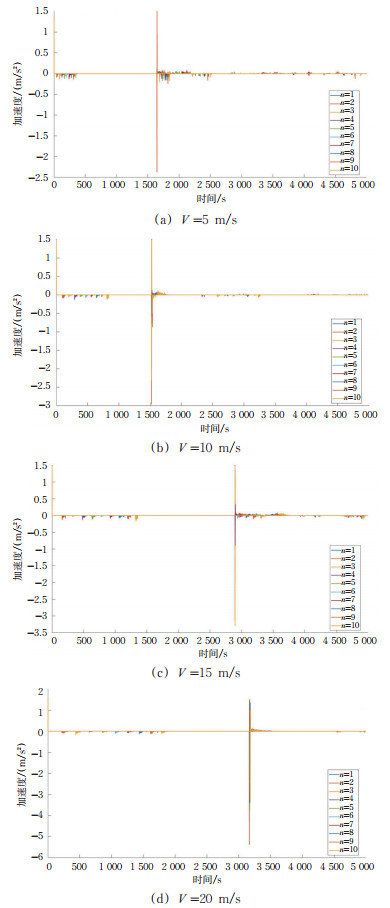
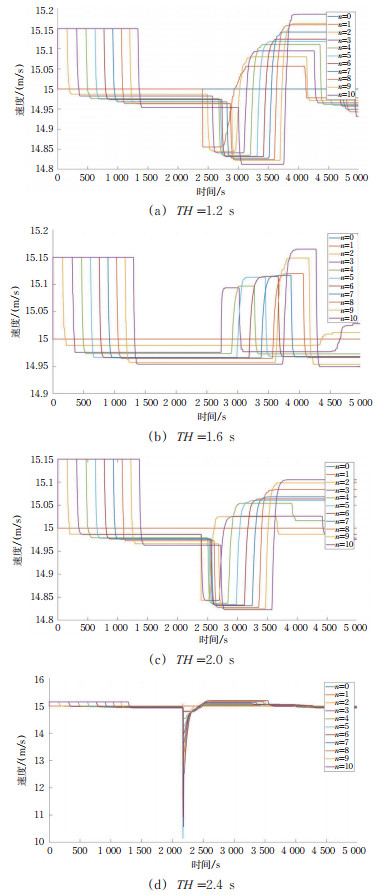
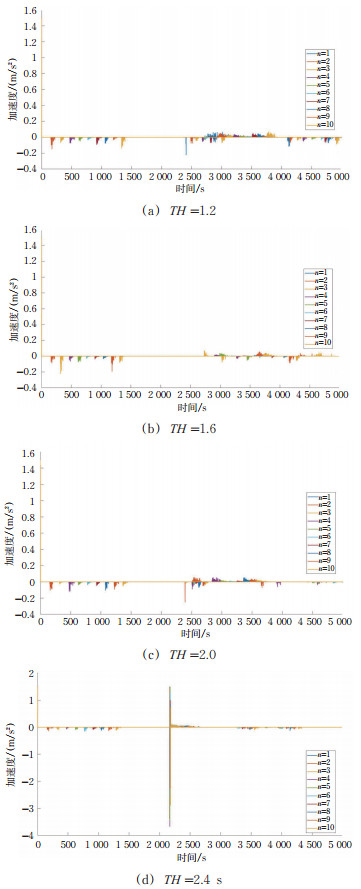
Vehicle cut-in is a frequent lane-changing behavior, which has a significant impact on traffic efficiency and safety. Therefore, studying driving behavior at the cut-in scenarios is of great significance for disclosing the mechanism of traffic congestion and driving safety. Based on a natural driving dataset collected for this study, driving conditions of the cut-in behaviors are analyzed based on drivers'subjective risk perceptions. A desired safety margin (DSM)model is used to calibrate the relevant parameters under the cut-in scenario, and a following platoon simulation at the cut-in scenarios is developed according to the calibrated results. During the simulation study, it is found that the differences in platoon length, vehicle speed, and cut-in position all affect the stability and adjustment of the platoon. When the number of vehicles in platoon increases from 4 to 13, and their speed increases from 5 to 20 m/s, and the position of the cut-in vehicle changes from close to the front and rear vehicles to the middle of the two vehicles, it is found that the cut-in behavior presents a reducing impact on the stability of the platoon, which also facilitates the platoon returning to a stable state.

| [1] |
ZHAO Chunqing, WANG Wenshuo, LI Shaopeng, et al. Influence of cut-in maneuvers for an autonomous car on surrounding drivers: experiment and analysis[J]. IEEE Transactions on Intelligent Transportation Systems, 2020(99): 1-11. http://ieeexplore.ieee.org/document/8715668
|
| [2] |
朱西产, 张佳瑞, 马志雄. 安全切入场景下的驾驶人初始制动时刻分析[J]. 中国公路学报, 2019(32): 262-273+318. https://www.cnki.com.cn/Article/CJFDTOTAL-ZGGL201906027.htm
ZHU Xichan, ZHANG Jiarui, MA Zhixiong. Analysis of the driver's initial braking moment in a safe cut-in scenario[J]. Journal of China Highway, 2019(32): 262-273+318. (in chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-ZGGL201906027.htm
|
| [3] |
SUN Xiaoyu, ZHU Xichan, ZHANG Kaiyuan, et al. Automatic detection method research of incidents in China-FOT database[C]. 2016 IEEE 19th International Conference on Intelligent Transportation Systems (ITSC), Rio de Janeiro, Brazil: IEEE, 2016.
|
| [4] |
宋现敏, 金盛, 王殿海, 等. 考虑侧向偏移的车辆跟驰模型[J]. 吉林大学学报(工学版), 2011(41): 333-337. https://www.cnki.com.cn/Article/CJFDTOTAL-JLGY201102009.htm
SONG Xianmin, JIN Sheng, WANG Dianhai, et al. Car-following model considering lateral offset[J]. Journal of Jilin University(Engineering Edition), 2011(41): 333-337(. in chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-JLGY201102009.htm
|
| [5] |
LIU Kai, GONG Jianwei, KURT A, et al. A model predictive-based approach for longitudinal control in autonomous driving with lateral interruptions[C]. 2017 IEEE Intelligent Vehicles Symposium(Ⅳ), Los Angeles, CA, USA: IEEE, 2017.
|
| [6] |
LU Xiaoyun, SHLADOVER S. Integrated ACC and CACC development for heavy-duty rruck partial automation[C]. 2017 American Control Conference (ACC), Seattle, WA, USA: IEEE, 2017.
|
| [7] |
HUANG Zhiyuan, ZHAO Ding, LAM H, et al. Using the piecewise mixture model to evaluate automated vehicles in the frontal cut-in scenario[J]. Ann Arbor, 2016(1001): 48+109. http://pdfs.semanticscholar.org/ad90/b2ec548ef52ec000d6bef3ca0f467eeec7ad.pdf
|
| [8] |
鲁光泉, 王云鹏, 田大新. 车车协同安全控制技术[M]. 北京: 科学出版社, 2014.
LU Guannquan, WANG Yunpeng, TIAN Daxin. Vehicle-to-vehicle cooperative safety control technology[M]. Beijing: Science Press, 2014(. in chinese)
|
| [9] |
ZHANG Junjie, WANG Yunpeng, LU Guangquan. Impact of heterogeneity of car-following behavior on rear-end crash risk[J]. Accident Analysis & Prevention, 2019(125): 275-289. http://www.sciencedirect.com/science/article/pii/S0001457519302714
|
| [10] |
NGODUY D. Effect of the car-following combinations on the instability of heterogeneous traffic flow[J]. Transportmetrica B: Transport Dynamics, 2015(3): 44-58. http://www.researchgate.net/profile/Dong_Ngoduy/publication/265160471_Effect_of_the_car-following_combinations_on_the_instability_of_heterogeneous_traffic_flow/links/5405a1ce0cf2c48563b17263.pdf
|
| [11] |
WANG Yunpeng, ZHANG Junjie, LU Guangquan. Influence of driving behaviors on the stability in car following[J]. IEEE Transactions on Intelligent Transportation Systems, 2019(20): 1081-1098. http://it.ckcest.cn/portal.php?mod=viewaid=3347163
|
| [12] |
TANAKA M, RANJITKAR P, NAKATSUJI T. Asymptotic stability and vehicle safety in dynamic car-following platoon[J]. Transportation Research Record, 2008(2088): 198-207. http://www.onacademic.com/detail/journal_1000038831711310_4fd6.html
|
| [13] |
TAMPERE C, HOOGENDOORN S, VAN AREM B. A behavioural approach to instability, stop and go waves, wide jams and capacity drop[J]. Transportation and Traffic Theory, 2005(16): 205-228. http://www.mech.kuleuven.be/cib/verkeer/dwn/pub/P2005F.pdf
|
| [14] |
HOURDOS J N. Crash prone traffic flow dynamics: Identification and real-time detection[D]. Minnesota: University of Minnesota, 2005
|
| [15] |
ZHENG Zuduo, AHN S, MONSERE C M. Impact of traffic oscillations on freeway crash occurrences[J]. Accident Analysis & Prevention, 2010(42): 626-636. http://smartsearch.nstl.gov.cn/paper_detail.html?id=daf8bbfe82db6895b8058d56c9d7d050
|
| [16] |
CHATTERJEE I, DAVIS G A. Analysis of rear-end events on congested freeways by using video-recorded shock waves[J]. Transportation Research Record, 2016(2583): 110-118. http://www.onacademic.com/detail/journal_1000039933848110_5cb7.html
|
| [17] |
HOOGENDOORN S P, OSSEN S, SCHREUDER M M. Properties of a microscopic heterogeneous multi-anticipative traffic flow model[C]. Transportation and Traffic Theory 2007, London, England: Transportation Research Board, 2007.
|
| [18] |
LU Guangquan, CHENG Bo, LIN Qingfeng, et al. Quantitative indicator of homeostatic risk perception in car following[J]. Safety Science, 2012(50): 1898-1905. http://www.sciencedirect.com/science?_ob=ShoppingCartURL&_method=add&_eid=1-s2.0-S0925753512001270&originContentFamily=serial&_origin=article&_ts=1490768039&md5=28613f618702ec172df41472badbdfa4
|

Figures(12) / Tables(3)



 DownLoad:
DownLoad: