| Citation: | SUN Xiongfeng, HUANG Zhen, CHEN Zhijun, LUO Peng. An Image Generation Method for Automated Driving Based on Improved GAN[J]. Journal of Transport Information and Safety, 2021, 39(5): 50-58,75. doi: 10.3963/j.jssn.1674-4861.2021.05.007

|
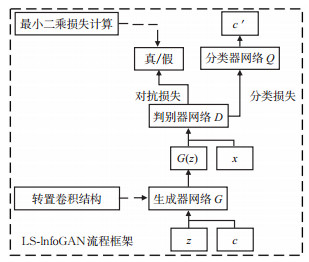
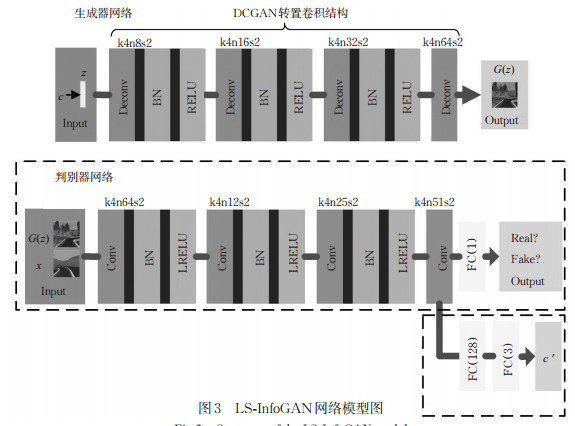
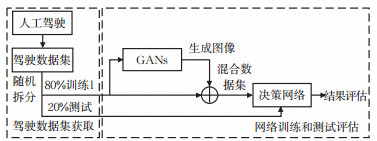
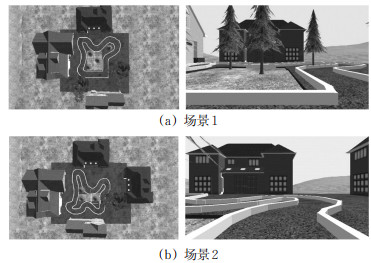
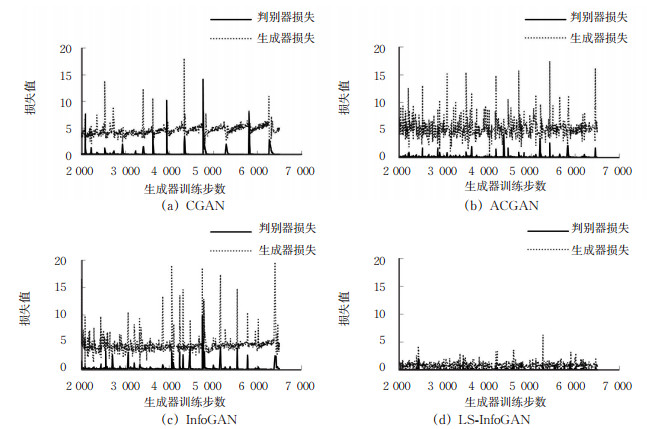
There is a huge demand for driving images in the automated driving systems based on end-to-end data system. In order to solve the instability of general generative adversarial network model and the lack of diversity of generated image features when expanding the driving image data set, this work proposed an improved network model, LS-InfoGAN. The least-squares loss is used to prevent the model gradient from disappearing and alleviate the contradiction in the generator during optimization, thereby improving stability of the model. The learning ability of the generator is improved by maximizing mutual information between generated images and actual images, thus improving the diversity of its features. The transposed convolutional layer to restore the image features is used to improve the clarity of the generated image features. The effectiveness and application performance of the model are verified with a labeled image dataset acquired in self-built driving scenes. According to the academic analysis in this study, compared with the model before the improvement, the stability of the image generation process of the LS-InfoGAN model is improved by an average of 35%。Besides, when used for training in the decision network of end-to-end self-driving systems, the augmented dataset can improve the decision performance by 1% to 2% without acquiring new images. The recommended number of generated images is 1 to 2 times the number of original images when the model is used to augment the dataset.

| [1] |
SCHWARTINGW, ALONSO-MORAJ, RUS D. Planning and decision-making for autonomous vehicles[J]. Annual Review of Control, Robotics, and Autonomous Systems, 2018, 1(1): 187-210. doi: 10.1146/annurev-control-060117-105157
|
| [2] |
WANG Q, CHEN L, TIAN B, et al. End-to-end autonomous driving: An angle branched network approach[J]. IEEE Transactions on Vehicular Technology, 2019, 68(12): 11599-11610. doi: 10.1109/TVT.2019.2921918
|
| [3] |
DOORAKIA R, LEED J. An end-to-end deep reinforcement learning-based intelligent agent capable of autonomous exploration in unknown environments[J]. Sensors, 2018, 18(10): 3575.
|
| [4] |
SHI H B, SHI L, XU M, et al. End-to-end navigation strategy with deep reinforcement learning for mobile robots[J]. IEEE Transactions on Industrial Informatics, 2020, 16(4): 2393-2402. doi: 10.1109/TII.2019.2936167
|
| [5] |
LECUN Y, COSATTO E, BEN J, et al. Dave: autonomous off-road vehicle control using end-to-end learning. Technical Report DARPA-IPTO Final Report[R]. New York: Courant Institute, 2004.
|
| [6] |
CHEN Y C, SEFF A, KORNHAUSER A, et al. Deepdriving: learning affordance for direct perception in autonomous driving[C]. 15th International Conference on Computer Vision(IC-CV), Santiago: IEEE, 2015.
|
| [7] |
KINGMA P D, WELLING M. Auto-encoding variational bayes[C]. 2nd International Conference on Learning Representations (ICLR), Banff, Canda: IEEE, 2014.
|
| [8] |
GOODFELLOW I J, POUGET-ABADIE J, MIRZA M, et al. Generative adversarial nets[C]. 27th International Conference on Neural Information Processing Systems(NIPS), Cambridge, USA: IEEE, 2014.
|
| [9] |
罗会兰, 敖阳, 袁璞. 一种生成对抗网络用于图像修复的方法[J]. 电子学报, 2020, 48(10): 1891-1898. https://www.cnki.com.cn/Article/CJFDTOTAL-DZXU202010003.htm
LUO Huilan, AO Yang, YUAN Pu. Image inpainting using generative adversarial networks[J]. Acta Electronica Sinica, 2020, 48(10): 1891-1898. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-DZXU202010003.htm
|
| [10] |
曹锦纲, 李金华, 郑顾平. 基于生成式对抗网络的道路交通模糊图像增强[J]. 智能系统学报, 2020, 15(3): 491-498. https://www.cnki.com.cn/Article/CJFDTOTAL-ZNXT202003013.htm
CAO Jinggang, LI Jinhua, ZHENG Guping. Enhancement of blurred road-traffic images based on generative adversarial network[J]. CAAI Transactions on Intelligent Systems, 2020, 15(3): 491-498. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-ZNXT202003013.htm
|
| [11] |
RADFORD A, METZL, CHINTALAS. Unsupervised representation learning with deep convolutional generative adversarial networks[C]. 4th International Conference on Learning Representations(ICLR), San Juan, Puerto Rico: IEEE, 2016.
|
| [12] |
MAO X D, LI Q, XIE H R, et al. Least squares generative adversarial networks[C]. 16th International Conference on Computer Vision(ICCV), Venice, Italy: IEEE, 2017.
|
| [13] |
ARJOVSKY M, CHINTALA S, BOTTOUL. Wasserstein gan[C]. 34th International Conference on MeachineLearning (ICML), Sydney, Austrilia: IEEE, 2017.
|
| [14] |
GULRAJANⅡ, AHMEDF, ARJOVSKYM, et al. Improved training of wasserstein gans[C]. 31th International Conference on Neural Information Processing Systems(NIPS), Long Beach, USA: IEEE, 2017.
|
| [15] |
MIRZA M, OSINDEROS. Conditional generative adversarial nets[J/OL]. (2014-11-6)[2021-3-24]. https://arxiv.org/abs/1411.1784.
|
| [16] |
CHEN X, DUAN Y, HOUTHOOFTR, et al. InfoGAN: interpretable representation learning by information maximizing generative adversarial nets[C]. 30th International Conference on Neural Information Processing Systems(NIPS), Barcelona, Spain: IEEE, 2016.
|
| [17] |
ODENA A, OLAH C, SHLENS J. Conditional image synthesis with auxiliary classifier gans[C]. 34th International Conference on Meachine Learning (ICML), Sydney, Austrilia: IEEE, 2017.
|
| [18] |
王力, 李敏, 闫佳庆, 等. 基于生成式对抗网络的路网交通流数据补全方法[J]. 交通运输系统工程与信息, 2018, 18(6): 63-71. https://www.cnki.com.cn/Article/CJFDTOTAL-YSXT201806010.htm
WANG Li, LI Min, YAN Jiaqing, et al. Urban traffic flow data recovery method based on generative adversarial network[J]. Journal of Transportation Systems Engineering and Information Technology, 2018, 18(6): 63-71. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-YSXT201806010.htm
|
| [19] |
王凯. 基于生成式对抗网络(GAN)的自动驾驶容错感知研究[D]. 杭州: 浙江大学, 2018.
WANG Kai. Study on fault-tolerant sensing of automatic driving system based on generative adversarial nets[D]. Hangzhou: Zhejiang University, 2018. (in Chinese)
|
| [20] |
CHEN L, HU X M, TANG B, et al. Parallel motion planning: learning a deep planning model against emergencies[J]. IEEE Intelligent Transportation System Magazine, 2019, 11(1): 36-41. doi: 10.1109/MITS.2018.2884515
|
| [21] |
HOWARD A, SANDLER M, CHU G, et al. Searching for MobileNetV3[C]. 18th International Conference on Computer Vision(ICCV), Seoul, Korea: IEEE, 2019.
|

Figures(7) / Tables(4)



 DownLoad:
DownLoad: