Abstract:
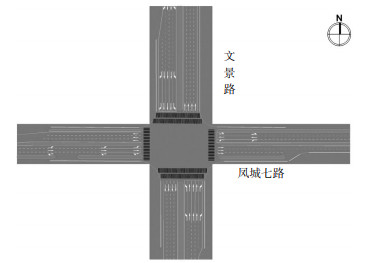
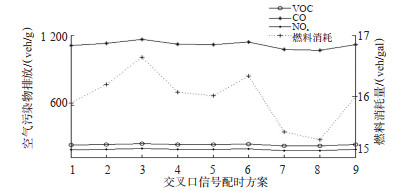
In order to improve the efficiency of signalized intersections under the consideration of the courtesy rules from vehicles to pedestrians, a timing optimization method based on superposition-phase is proposed. A typical intersection from Xi'an is taken as a case study. The conflicts between vehicles and pedestrians are analyzed. Based on Webster's timing model, a timing optimization model is developed, which combines superposition phase design and space-time separation strategy for reducing the conflicts between vehicles and pedestrians. In addition, the calculation methods for starting time of pedestrian phase and the threshold for adopting vehicle-pedestrian phase separation strategy are proposed. Then VISSIM simulation software is used to verify the effectiveness of the proposed signal timing optimization schemes. The simulation results show that compared to the current scheme, the scheme from the proposed timing optimization method can reduce the average vehicle delay, delay per capita, total vehicle delay, total pedestrian delay and total intersection delay by 27.11%, 22.41%, 27.08%, 22.49%, and 26.15%, respectively. In addition, it can also reduce the emissions of VOC, CO, NOx, and fuel consumption by 3.76%, 3.76%, 3.76%, and 3.78%, respectively. The proposed method can effectively reduce the vehicle-pedestrian conflicts and improve the efficiency of traffic operation at signalized intersections.