

A Personalized Lane Change Decision Method Based on Driver's Psychological Risk Field Model
-
摘要: 行驶环境中交互车辆的运动行为会对驾驶人心理产生刺激,引起驾驶人心理状态的变化,进而影响其换道决策行为。为此提出了1种基于驾驶人心理风险场模型的个性化换道决策方法。基于单向3车道快速路交通场景,通过交互式多模型分析车辆的横向速度与横向位移,引入可变横向速度相关的转移概率矩阵,预测交互车辆的目标车道选择;建立驾驶人心理风险场模型,量化行驶环境与交互车辆的运动行为对驾驶人心理风险造成的影响;利用高仿真驾驶模拟器联合SUMO试验平台开展287人次的模拟驾驶试验,通过建立混合交通仿真场景采集驾驶人的换道数据,并选取平均碰撞时间与驾驶人心理风险因子2个特征参数,使用K-means算法进行驾驶风格聚类,将驾驶人分为保守型、正常型和激进型这3类,并进一步确定不同风格的驾驶人在换道初始时刻所能接受的心理风险阈值。在此基础上,实现车辆的个性化安全换道决策。驾驶模拟器试验验证结果表明:对应于保守型、正常型和激进型的驾驶人,实际最小换道决策时间分别为3.48,6.29,11.33 s,实际最大换道决策时间分别为4.65,7.45,12.52 s,理论换道决策时间分别为4.09,6.83,11.95 s,所建立的换道决策模型的个性化换道时间预测误差均小于0.62 s。本方法可以准确评估不同风格驾驶人的心理风险,实现个性化的换道决策。Abstract: In driving environments, the motion behavior of interacting vehicles can stimulate the psychological and mental state of drivers, subsequently influencing their lane-changing decision behavior. In response to this, a personalized lane-changing decision method based on a driver's psychological risk field model is investigated. Focusing on a three-lane expressway traffic scenario, the vehicles' lateral speed and lateral offset are analyzed by interacting multiple models. Variable lateral speed-related transition probability matrices are introduced to predict the target lane selection of interacting vehicles. A model is established to quantify the impact of the driving environment and interacting vehicles' motion behavior on drivers' psychological risk. The experiment is conducted by establishing mixed traffic scenarios in a SUMO-based driving simulator, and 287 cases of lane-change datasets are collected. Two characteristic parameters, average collision time and driver psychological risk factor, are selected. The K-means algorithm is used for driver style clustering, categorizing drivers into conservative, normal, and aggressive styles. Furthermore, different thresholds for psychological risk at the initial moment of lane-changing are determined for drivers with different styles. Then personalized safe lane-changing decisions for vehicles are implemented. Experimental results show that, for conservative, normal, and aggressive drivers, the actual minimum lane-changing decision times are 3.48, 6.29, and 11.33 s, respectively. The actual maximum lane-changing decision times are 4.65, 7.45, and 12.52 s, respectively. The theoretical lane-changing decision times are 4.09, 6.83, and 11.95 s, respectively. The prediction errors of the personalized lane-changing decision model are all less than 0.62 seconds. This approach accurately assesses the psychological risk of drivers with different styles and achieves personalized lane-changing decisions.
-
Key words:
- traffic safety /
- lane-changing decision /
- psychological risk /
- driving style /
- driving simulation
-

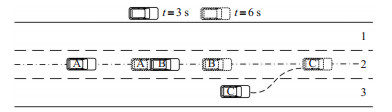
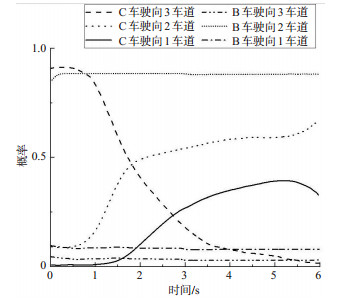
图 2 交互车辆运动行为预测模型结构图
Figure 2. Interactive vehicle motion behavior prediction model structure diagram

图 4 平均车速与每起事故平均死亡人数的关系
Figure 4. The relationship between average vehicle speed and the average number of deaths per accident

图 5 单位事故损失与路面附着系数的关系
Figure 5. The relationship between unit accident loss and road surface friction coefficient

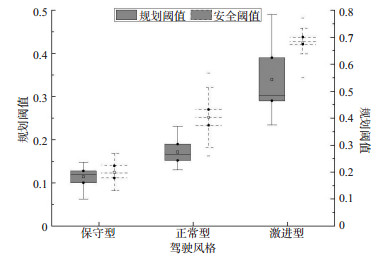
图 9 不同驾驶风格的驾驶人心理风险阈值
Figure 9. Psychological risk thresholds for drivers with different driving styles

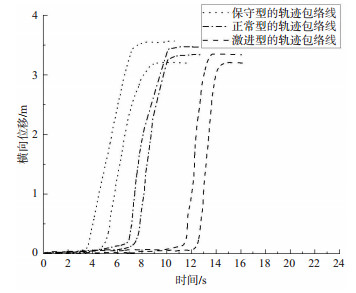
图 12 34名驾驶人的实际换道轨迹包络线
Figure 12. The actual lane change trajectory envelope for 34 drivers

图 13 基于驾驶人心理风险的换道决策
Figure 13. Lane change decisions based on the driver's psychological risk
表 1 中国5种类型道路安全交通事故数据
Table 1. Data on five type of road safety traffic accidents in China
道路类型 平均车速/(km/h) 死亡人数 平均死亡人数 高速公路 100 5 843 0.672 一级公路 70 6 532 0.359 二级公路 50 13 642 0.373 三级公路 35 7 499 0.327 四级公路 30 5 006 0.314  下载: 导出CSV
下载: 导出CSV
表 2 中国道路安全交通事故数据(路面状态)
Table 2. Chinese road safety traffic accident data (road surface status)
路面状态 路面附着系数 单位事故损失/(×1 000元) 干燥 0.90 4.978 潮湿 0.60 6.683 泥泞 0.55 6.438
下载: 导出CSV
表 3 不同道路线性的单位事故损失标定
Table 3. Unit accident loss calibration for different road linearities
道路曲率 道路坡度 平路 正常坡 陡坡 连续坡 直路 1.000 1.614 1.377 4.172 正常弯 1.174 1.425 1.540 急弯 1.256 1.274 1.412
下载: 导出CSV
表 4 不同驾龄驾驶人的心理风险标定
Table 4. Psychological risk calibration for drivers of different driving experience
编号 驾龄u/年 ψ(de) 1 >0~1 0.601 2 >1~2 0.612 3 >2~3 0.685 4 >3~4 0.672 5 >4~5 0.668 6 >5~10 0.795 7 >10~15 0.921 8 >15~20 0.947 9 >20 1.000
下载: 导出CSV
表 5 不同受教育程度驾驶人的心理风险标定
Table 5. Psychological risk calibration for drivers with different levels of education
编号 受教育程度 ψ(rt) 1 无 0.690 2 小学 0.458 3 中学 0.372 4 本科 1.000 5 本科以上 0.786
下载: 导出CSV
表 6 不同驾驶风格的驾驶人心理风险阈值
Table 6. Psychological risk thresholds for drivers with different driving styles
驾驶风格 Kα Kβ 保守型 0.109 9 0.179 7 正常型 0.152 0 0.378 4 激进型 0.290 4 0.677 5
下载: 导出CSV
表 7 不同驾驶风格的换道轨迹决策时间
Table 7. Lane change trajectory decision times for different driving styles
驾驶风格 换道决策时间/s 最小值 最大值 保守型 3.48 4.65 正常型 6.29 7.45 激进型 11.33 12.52
下载: 导出CSV
-
[1] LI Q W, LI X P, MANNERING F. Assessment of discretionary lane-changing decisions using a random parameters approach with heterogeneity in means and variances[J]. Transportation Research Record, 2021 (6): 330-338. [2] GIPPS P G. A model for the structure of lane-changing decisions[J]. Transportation Research Part B: Methodological, 1986, 20 (5): 403-414. doi: 10.1016/0191-2615(86)90012-3 [3] 王慧然, 陈无畏, 王其东, 等. 基于相邻车道安全态势划分的换道决策[J]. 机械工程学报, 2023, 59 (2): 233-244. https://www.cnki.com.cn/Article/CJFDTOTAL-JXXB202302020.htmWANG H R, CHEN W W, WANG Q D, et al. Lane change decision based on the safety state division of the adjacent lanes[J]. Journal of Mechanical Engineering, 2023, 59(2): 233-244. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-JXXB202302020.htm [4] WANG J J, ZHANG Q C, ZHAO D B, et al. Lane change decision-making through deep reinforcement learning with rule-based constraints[C]. 2019 International Joint Conference on Neural Networks(IJCNN), Budapest, Hungary : IEEE, 2019. [5] SHENG Z H, LIU L, XUE S B, et al. A cooperation-aware lane change method for autonomous vehicles[J]. IEEE Transactions on Intelligent Transportation Systems, 2022, 24(3): 3236-3251. [6] WANG W D, QIE T Q, YANG C, et al. An intelligent lane-changing behavior prediction and decision-making strategy for an autonomous vehicle[J]. IEEE Transactions on Industrial Electronics, 2021, 69 (3): 2927-2937. [7] SATHYAN A, MA J Q, COHEN K. Decentralized cooperative driving automation: a reinforcement learning framework using genetic fuzzy systems[J]. Transportmetrica B: Transport Dynamics, 2021, 9 (1): 775-797. doi: 10.1080/21680566.2021.1951394 [8] 聂琳真, 管家意, 卢炽华, 等. 基于模糊逻辑的高速公路微观换道行为[J]. 北京工业大学学报, 2018, 44 (3): 424-432. https://www.cnki.com.cn/Article/CJFDTOTAL-BJGD201803015.htmNIE L Z, GUAN J Y, LU C H, et al. Micro-lane changing behavior of expressways based on fuzzy logic[J]. Journal of Beijing University of Technology, 2018, 44(3): 424-432. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-BJGD201803015.htm [9] GU X P, HAN Y P, YU J F. A novel lane-changing decision model for autonomous vehicles based on deep autoencoder network and XGBoost[J]. IEEE Access, 2020, (8) : 9846-9863. [10] FAN B, WU Y, HE Z B, et al. Digital twin empowered mobile edge computing for intelligent vehicular lane-changing[J]. IEEE Network, 2021, 35 (6): 194-201. doi: 10.1109/MNET.201.2000768 [11] CHENG S, YANG B, WANG Z, et al. Spatio-temporal image representation and deep-learning-based decision framework for automated vehicles[J]. IEEE Transactions on Intelligent Transportation Systems, 2022, 23 (12): 24866-24875. doi: 10.1109/TITS.2022.3195213 [12] ZHOU W, CHEN D, YAN J, et al. Multi-agent reinforcement learning for cooperative lane changing of connected and autonomous vehicles in mixed traffic[J]. Autonomous Intelligent Systems, 2022, 2 (1): 1-11. doi: 10.1007/s43684-021-00019-7 [13] ZHANG X H, SUN J, QI X, et al. Simultaneous modeling of car-following and lane-changing behaviors using deep learning[J]. Transportation Research Part C: Emerging Technologies, 2019 (104): 287-304. [14] XIE D F, FANG Z Z, JIA B, et al. A data-driven lane-changing model based on deep learning[J]. Transportation Research Part C: Emerging Technologies, 2019, (106): 41-60. [15] GAO J, MURPHEY Y L, ZHU H H. Multivariate time series prediction of lane changing behavior using deep neural network[J]. Applied Intelligence, 2018, 48 (10): 3523-3537. [16] WANG X Y, GUO Y Q, BAI C L, et al. Driver's intention identification with the involvement of emotional factors in two-lane roads[J]. IEEE Transactions on Intelligent Transportation Systems, 2020, 22 (11): 6866-6874. [17] LIU Y Q, WANG X Y. The analysis of driver's behavioral tendency under different emotional states based on a Bayesian Network[J]. IEEE Transactions on Affective Computing, 2020, 14 (1): 165-177. [18] LING J, LI J, TEI K, et al. Towards personalized autonomous driving: an emotion preference style adaptation framework[C]. 2021 IEEE International Conference on Agents (ICA), Kyoto, Japan: IEEE, 2021. [19] 李青, 景云超, 朱彤, 等. 基于LightGBM的驾驶人风险感知能力判别方法[J]. 交通信息与安全, 2021, 39 (4): 16-25. doi: 10.3963/j.jssn.1674-4861.2021.04.003LI Q, JING Y C, ZHU T, et al. Driver risk perception ability identification method based on LightGBM[J]. Journal of Transport Information and Safety, 2021, 39(4): 16-25. (in Chinese) doi: 10.3963/j.jssn.1674-4861.2021.04.003 [20] GAO H B, QIN Y C, HU C, et al. An interacting multiple model for trajectory prediction of intelligent vehicles in typical road traffic scenario[J]. IEEE Transactions on Neural Networks and Learning Systems, 2021, 34 (9): 1-12. [21] PAK J M. Hybrid interacting multiple model filtering for improving the reliability of radar-based forward collision warning systems[J]. Sensors, 2022, 22 (3): 875. [22] GOMAA M A K, DE SILVA O, MANN G K I, et al. Observability-constrained VINS for MAVs using interacting multiple model algorithm[J]. IEEE Transactions on Aerospace and Electronic Systems, 2020, 57 (3): 1423-1442. [23] FAN X X, WANG G, HAN J C, et al. Interacting multiple model based on maximum correntropy Kalman filter[J]. IEEE Transactions on Circuits and Systems Ⅱ: Express Briefs, 2021, 68 (8): 3017-3021. [24] LI Y, WANG J Q, WU J. Model calibration concerning risk coefficients of driving safety field model[J]. Journal of Central South University, 2017, 24 (6): 1494-1502. [25] 郭子彬, 陈慧, 夏韬锴, 等. 弯道工况下驾驶人主观风险感知的量化研究[J]. 汽车工程, 2022, 44 (9): 1447-1455.GUO Z B, CHEN H, XIA T K, et al. Quantitative study of driver's subjective risk perceptionunder curved working conditions[J]. Automotive Engineering, 2022, 44(9): 1447-1455. (in Chinese) [26] 公安部交通管理局. 中国道路交通事故统计年报[R]. 北京: 公安部交通管理局, 2017.Ministry of Public Security, Transportation Bureau. The road traffic accidents statistics report in China[R]. Beijing: Ministry of Public Security, Transportation Bureau, 2017. (in Chinese) -









 点击查看大图
点击查看大图

计量
- 文章访问数: 536
- HTML全文浏览量: 257
- PDF下载量: 126
- 被引次数: 0