

Cooperative Positioning of Vehicle Fleets Using Road Probability Field
-
摘要: 标量场方法通常被用于无人机集群和潜艇集群的协同定位,但在车队场景中,应用磁异常场、水深场等类似的标量场存在困难。本研究提出了1种基于道路概率场和车辆运动模型的车队协同定位方法,该方法利用开源数据库获取电子地图,对地图进行缓冲区处理、栅格化处理和数学形态学处理,构建了道路概率场。同时,基于GNSS技术建立了车辆运动模型,利用车队内车辆之间的相对位置作为协同信息,把车辆预测位置在道路概率场中的取值作为权重计算标准,使用粒子滤波定位算法不断更新预测车辆行驶轨迹。新方法建立了道路概率场这一标量场,把车辆位置对应的道路概率值作为判定车辆位置的重要依据,将电子地图中的地理空间信息应用于车队协同定位。与传统的标量场方法不同,道路概率场无需新的专门测量,并且可以利用已有的海量电子地图资源进行生成,而车辆也无需新增传感器。此外,新方法根据不同场景设计了车辆运动模型,在车辆行驶过程中利用道路概率场不断优化轨迹,与传统车队定位方法相比更注重单个时刻点定位的差异。在真实场景和仿真场景中设置不同缓冲区宽度和车辆数进行对比测试,结果显示:根据定位误差作为定位效果的判定标准,与经典的利用车辆运动模型的扩展卡尔曼滤波方法相比,新方法在仿真场景和真实场景中将改进幅度分别提高了49.6%和49.8%;与空道路概率场的车队协同定位方法相比,在仿真场景和真实场景中新方法分别改进了59.5%和50.3%。本研究为车队协同定位提供了1种新的方法,通过构建道路概率场并利用车辆运动模型,相较于传统方法,该方法提高了定位的精度和可靠性,具有重要的应用前景。Abstract: Scalar field methods are widely used in the coordinated positioning of groups of unmanned automatic vehicles (UAVs) and submarines. However, there are difficulties in applying similar scalar fields such as magnetic anomaly fields and water depth fields in vehicle fleet scenarios. To address this issue, a vehicle fleet collaborative positioning method based on road probability field and vehicle motion model is proposed an open-source database is used to obtain electronic maps, and the electronic maps were buffered, rasterized, and processed with mathematical morphology to construct road probability field. At the same time, a vehicle motion model is established based on GNSS technology, using the relative positions between vehicles in the fleet as collaborative information, taking the value of the predicted position of the vehicle in the road probability field as a weight calculation criterion, and using particle filtering localization algorithms to continually update the predicted trajectory of the vehicle. The new method establishes the road probability field as a scalar field, using the road probability value corresponding to the vehicle position as an important basis for determining the vehicle position, and applying the geographic spatial information contained in the electronic map to the collaborative positioning of the vehicle fleet. Unlike traditional scalar field methods, road probability fields do not require new specialized measurements and can be generated using the massive electronic map resources already available, and vehicles do not require new sensors. A vehicle motion model is designed based on the application scenario, and the trajectory is continuously optimized using the road probability field during the dynamic process of vehicle driving, reflecting the difference with traditional fleet positioning methods that pay more attention to single time point positioning. Comparative tests were conducted on different buffer widths and vehicle numbers in real and simulation experiments. The results show that using positioning error as the criterion for determining the positioning effect, compared to the classic extended Kalman filtering method using vehicle motion models, proposed method achieves improvements of 49.6% and 49.8% in simulated and real scenarios, respectively. Compared with the fleet collaborative localization method based on empty road probability field, this method has improved by 59.5% and 50.3% in simulation and real scenarios, respectively. This study provides a new method for cooperative positioning by constructing a road probability field and utilizing a vehicle motion model. Compared to traditional methods, this method improves the accuracy and reliability of positioning and has important application prospects.
-

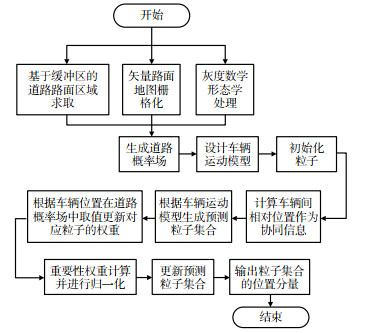
图 2 基于道路概率场的车队协同定位流程
Figure 2. Process of cooperative positioning of vehicle fleets using road probability field

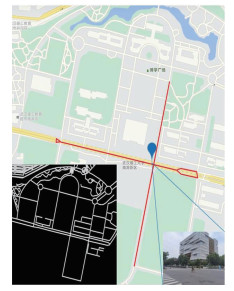
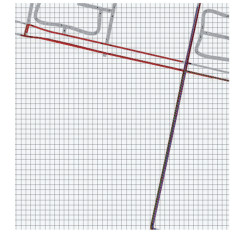
图 3 实验场景与道路概率场(红色路段为实验路段)
Figure 3. Experiment scene and road probability map (red section in dicates experiment section)

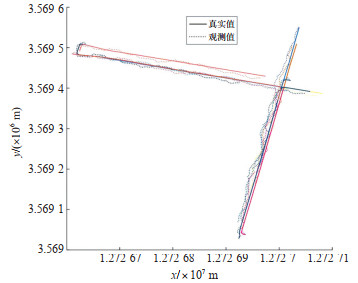
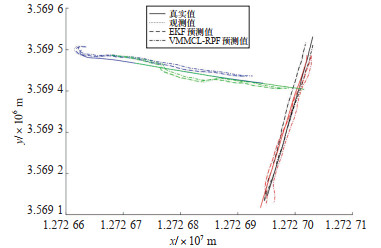
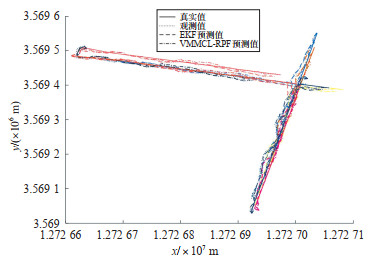
图 5 MATLAB仿真真值与观测值轨迹
Figure 5. MATLAB simulation truth trajectories and observed trajectories
表 1 真实场景下缓冲区宽度影响的误差中位数和标准差
Table 1. Error median and standard deviation of the influence of buffer width in the real scene
缓冲区宽度/(°) GNSS观测/m EKF方法/m VMMCL-RPF /m 0.000 01 12.6±2.38 12.5±2.56 6.12±2.88 0.000 02 12.6±2.38 12.5±2.56 6.46±2.88 0.000 03 12.6±2.38 12.5±2.56 5.54±2.99 0.000 04 12.6±2.38 12.5±2.56 7.06±3.00  下载: 导出CSV
下载: 导出CSV
表 2 仿真场景下缓冲区宽度影响的误差中位数和标准差
Table 2. Error median and standard deviation of the influence of buffer width in the simulation scene
缓冲区宽度/(°) GNSS观测/m EKF方法/m VMMCL-RPF /m 0.000 01 8.14±3.14 7.76±3.73 3.68±2.02 0.000 02 8.14±3.14 7.76±3.73 3.85±2.00 0.000 03 8.14±3.14 7.76±3.73 3.92±1.86 0.000 04 8.14±3.14 7.76±3.73 4.34±1.88
下载: 导出CSV
表 3 真实场景下车辆数影响的误差中位数和标准差
Table 3. Error median and standard deviation of the influence of the number of vehicles in the real scene
车辆数 GNSS观测/m EKF方法/m VMMCL-RPF/m 1 12.65±2.38 12.64±2.56 10.76±3.32 2 12.65±2.38 12.64±2.55 10.53±3.21 3 12.65±2.38 12.51±2.56 7.70±3.11 4 12.65±2.38 12.53±2.56 7.06±3.00
下载: 导出CSV
表 4 仿真场景下车辆数影响的误差中位数和标准差
Table 4. Error median and standard deviation of the influence of the number of vehicles in the simulation scene
车辆数 GNSS观测/m EKF方法/m VMMCL-RPF /m 1 8.14±3.84 7.69±3.80 9.11±3.38 2 8.14±3.84 7.69±3.80 7.62±3.36 3 8.14±3.84 7.76±3.77 5.64±2.52 4 8.14±3.84 7.75±3.76 4.71±2.07 5 8.14±3.84 7.77±3.74 4.50±2.01 10 8.14±3.84 7.76±3.73 3.86±1.94 15 8.14±3.84 7.76±3.72 3.64±2.08 20 8.14±3.84 7.76±3.72 3.57±2.05
下载: 导出CSV
表 5 定位误差统计表
Table 5. Positioning error statistics
场景 GNSS观测 EKF VMMCL-NoRPF VMMCL-RPF 仿真 482.937 9 460.519 0 572.477 9 232.043 0 实景 776.055 5 777.320 7 785.500 7 390.453 1
下载: 导出CSV
-
[1] 李博峰, 陈广鄂. GNSS/INS组合车辆协同精密定位方法[J]. 真实值观测值EKF预测值VMMCL-RPF预测值86测绘学报, 2022, 51(8): 1708-1716. https://www.cnki.com.cn/Article/CJFDTOTAL-CHXB202208004.htmLI B F, CHEN G E. Precise cooperative positioning for vehicles with GNSS and INS integration[J]. Acta Geodaetica et Cartographica Sinica, 2022, 51(8): 1708-1716. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-CHXB202208004.htm [2] 上官伟, 庞晓宇, 李秋艳, 等. 车路协同环境下群体车辆诱导与协同运行方法[J]. 交通运输工程学报, 2022, 22(3): 68-78. https://www.cnki.com.cn/Article/CJFDTOTAL-JYGC202203005.htmSHANG G W, PANG X Y, LI Q Y, et al. Guidance and cooperative operation method for group vehicles in vehicle-infrastructure cooperative environment[J]. Journal of Traffic and Transportation Engineering, 2022, 22(3): 68-78. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-JYGC202203005.htm [3] 张毅, 裴华鑫, 姚丹亚. 车路协同环境下车辆群体协同决策研究综述[J]. 交通运输工程学报, 2022, 22(3): 1-18. https://www.cnki.com.cn/Article/CJFDTOTAL-JYGC202203001.htmZHANG Y, PEI H X, YAO D Y. Research review on cooperative decision-making for vehicle swarms in vehicle-infrastructure cooperative environment[J]. Journal of Traffic and Transportation Engineering, 2022, 22(3): 1-18. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-JYGC202203001.htm [4] FERRI G, MunafòA, TESEI A, et al. Cooperative robotic networks for underwater surveillance: an overview[J]. Iet Radar Sonar & Navigation, 2017, 11(12): 1740-1761. [5] ROHANI M, GINGRAS D, GRUYER D. Vehicular cooperative map matching[C]. International Conference on Connected Vehicles & Expo, Vienna, Austria: IEEE, 2014. [6] QIAN C, ZHANG H, LI W, et al. Cooperative GNSS-RTK ambiguity resolution with GNSS, INS, and LiDAR data for connected vehicles[J]. Remote Sensing, 2020, 12(6): 949-972. doi: 10.3390/rs12060949 [7] ALAM N, BALAEI A T, DEMPSTER A G. A DSRC doppler-based cooperative positioning enhancement for vehicular networks with GPS availability[J]. IEEE Transactions on Vehicular Technology, 2011, 60(9): 4462-4470. doi: 10.1109/TVT.2011.2168249 [8] ROHANI M, GINGRAS D, GRUYER D. A novel approach for improved vehicular positioning using cooperative map matching and dynamic base station DGPS concept[J]. IEEE Transactions on Intelligent Transportation Systems, 2016, 17(1): 230-239. doi: 10.1109/TITS.2015.2465141 [9] SORENSON H W. Kalman filtering: theory and applications[M]. New York: IEEE Press, 1985. [10] SIMON D. Optimal State Estimation: Kalman, H∞, and nonlinear approaches[M]. New York: Wiley-Interscience, 2006. [11] BOUNINI F, GINGRAS D, POLLART H, et al. Real time cooperative localization for autonomous vehicles[C]. 2016 IEEE 19th International Conference on Intelligent Transportation Systems(ITSC), Rio de Janeiro, Brazil, IEEE, 2016. [12] SAKR A H, BANSAL G. Cooperative localization via DSRC and multi-sensor multi-target track association[C]. IEEE International Conference on Intelligent Transportation Systems, Rio de Janeiro, Brazil, IEEE, 2016. [13] RIVOIRARD L, WAHL M, SONDI P, et al. A cooperative vehicle ego-localization application using V2V communications with CBL clustering[C]. 2018 IEEE Intelligent Vehicles Symposium(Ⅳ), Changshu, China: IEEE, 2018. [14] SONG X, LING Y, CAO H, et al. Cooperative vehicle localisation method based on the fusion of GPS, inter-vehicle distance, and bearing angle measurements[J]. Intelligent Transport Systems, IET, 2019, 13(4): 644-653. doi: 10.1049/iet-its.2018.5091 [15] 付梦印, 邓志红, 张继伟. Kalman滤波理论及其在导航系统中的作用[M]. 北京: 科学出版社, 2003.FU M Y, DENG Z H, ZHANG J W. Kalman filter theory and its role in navigation systems[M]. Beijing: Science Press, 2003. (in Chinese) [16] SHEN C, ZHANG Y, GUO X T, et al. Seamless GNSS/inertial navigation system based on self-learning square-root cubature Kalman filter[J]. IEEE Transaction On Industrial Electronics, 2021, 68(1): 499-508. doi: 10.1109/TIE.2020.2967671 [17] YANG C, STRADER J, GU Y, et al. Cooperative navigation using pairwise communication with ranging and magnetic anomaly measurements[J]. Journal of Aerospace Information Systems, 2020, 17(11): 624-633. doi: 10.2514/1.I010785 [18] CANCIANI A, RAQUET J. Absolute positioning using the earth's magnetic anomaly field[J]. Navigation-Journal of The Institute of Navigation, 2016, 63(2): 111-126. doi: 10.1002/navi.138 [19] MELO J, MATOS A. Survey on advances on terrain based navigation for autonomous underwater vehicles[J]. Ocean Engineering, 2017, 139(15): 250-264. [20] HAN Y R, WANG B, DENG Z H, et al. A combined matching algorithm for underwater gravity-aided navigation[J]. IEEE-Asme Transactions On Mechatronics, 2018, 23(1): 233-241. [21] YANG C, STRADER J, GU Y. A scalable framework for map matching based cooperative localization[J]. Sensors, 2021, 21(19): 6400-6414. [22] WARMERDAM F. The geospatial data abstraction library[J]. Open Source Approaches in Spatial Data Handling, 2008, 2(1): 87-104. [23] 李俊山, 李旭辉. 数字图像处理[M]. 2版. 北京: 清华大学出版社, 2013.LI J S, LI X H. Digital image processing[M]. 2nd ed Beiing: Tsinghua University Press, 2013. (in Chinese) [24] ZHIYAO ZHAO H F. Towards exploring patterns of editing behavior on openstreetmap[J]. Journal of Geodesy and Geoinformation Science, 2022, 5(2): 85-97. -


 点击查看大图
点击查看大图
计量
- 文章访问数: 498
- HTML全文浏览量: 293
- PDF下载量: 15
- 被引次数: 0