

A Cooperative Control Method of Variable Speed Limit and Lane Change for Mixed Traffic Flow on Continuous Bottlenecks of Freeway
-
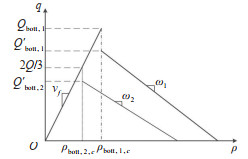
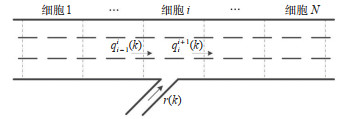
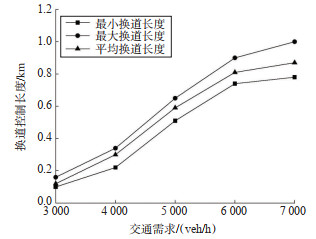
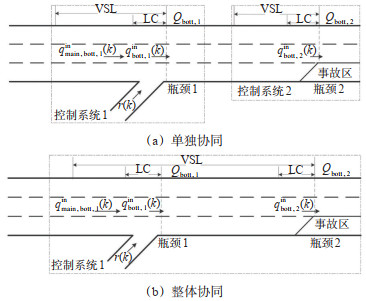
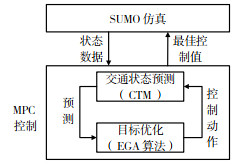
摘要: 为缓解高速公路连续瓶颈区车辆强制换道造成的通行能力下降的问题,减轻瓶颈之间的相互干扰,提出了面向智能网联车辆(connected and automated vehicles,CAVs)与普通车辆混行情况的高速公路连续瓶颈可变限速与换道协同控制策略。对传统的细胞传输模型(cell transmission model,CTM)进行改进,使其更好地预测考虑了可变限速地混合交通流状态;基于实验模拟,得到了不同交通需求场景下合理的换道控制段长度,通过对瓶颈上游车流进行预先换道提醒,缓解因强制换道引发的通行能力下降现象,进而提高可变限速控制的效果,同时利用可变限速对高交通需求下的流量进行调控,为换道控制段内车辆能够完成预先换道提供保障;构建了连续瓶颈下协同控制框架,并以最小化总行程时间和速度差为目标,优化连续瓶颈的交通运行性能;分析了3种CAVs渗透率对协同控制的影响。结果表明:相比于无控制和可变限速控制,在协同控制下总行程时间分别降低了54.76%和33.05%,总速度差分别减少了86.84%和29.58%。此外,CAVs对协同控制性能和道路运行状况有着积极作用。当CAVs渗透率为0.5时最低限速值由渗透率为0时的30 km/h提高至60 km/h,当渗透率为1时限速值始终保持在自由流速度,随着CAVs渗透率的增加协同控制下系统的总行程时间可从239.64 h减少至158.86 h。研究可为高速路连续瓶颈和未来含CAVs的混合交通流主动管控提供参考。Abstract: A cooperative control method of variable speed limit and lane change for mixed traffic flow consisting traditional human-driven vehicles and connected and connected and automated vehicles (CAVs) is developed to mitigate the capacity drop due to mandatory lane change and mutual interference between bottlenecks in the freeway. The traditional cell transmission model (CTM) is modified to better predict the mixed traffic flow state under variable speed limit control. A reasonable length of lane change section under different traffic demands are then obtained using experimental simulation. The capacity drop due to mandatory lane change is alleviated by reminding the drivers of upstream vehicles. In this way, the performance for variable speed limit is improved. Meanwhile, variable speed limit is adopted to regulate high traffic demand for the vehicle to successfully change lane. The cooperative control framework is set up for continuous bottlenecks, where the traffic performance is optimized by minimizing the total travel time and speed difference. At last, different penetration rates of CAVs' impact on cooperative control is analyzed. Study results show that, compared to the results of no-control or only variable speed limit, the total travel time with cooperative control, respectively is reduced by 54.76% or 33.05%, and the total speed difference is reduced by 86.84% and 29.58%, respectively. In addition, study results also show that the penetration rate of CAVs has a positive impact on the performance of cooperative control and traffic operation: if the penetration rate increased from 0 to 0.5, the minimum speed limit can be increased from 30 km/h to 60 km/h, while the speed limit value is kept as the free speed when the penetration rate reaches 1; the total travel time reduces from 239.64 h to 158.86 h with cooperative control in place as the CAVs penetration rate increases. This study provides a reference for the active control of continuous bottlenecks of freeway under a mixed traffic environment.
-

图 4 不同交通需求下所需的换道控制长度
Figure 4. Lane change control length under different traffic demands

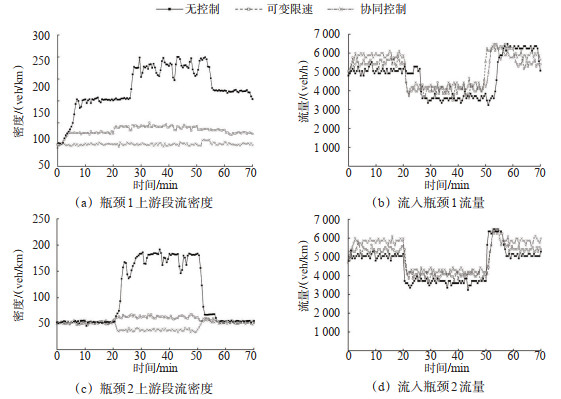
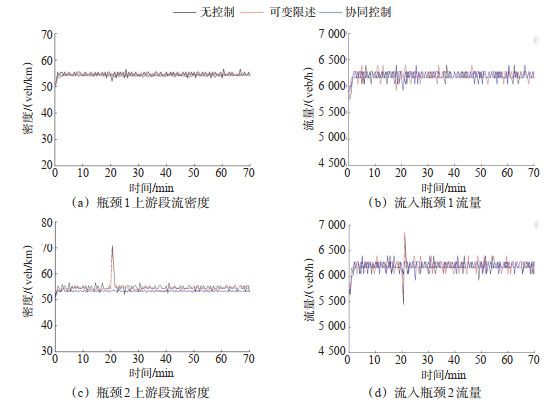
图 9 CAV渗透率为0时不同控制下2个瓶颈的交通状况
Figure 9. Traffic conditions of two bottlenecks under different control when CAV penetration rate is 0

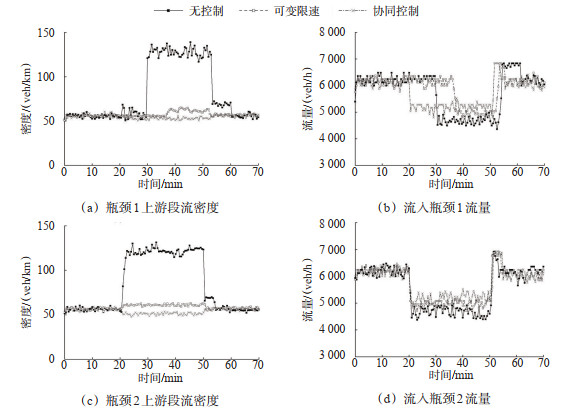
图 10 CAV渗透率为0.5时不同控制下2个瓶颈的交通状况
Figure 10. Traffic conditions of two bottlenecks under different control when CAV penetration rate is 0.5

图 11 CAV渗透率为1时不同控制下2个瓶颈的交通状况
Figure 11. Traffic conditions of two bottlenecks under different control when CAV penetration rate is 1

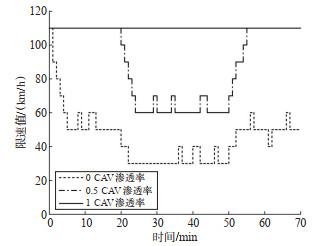
图 12 不同CAV渗透率下控制段1的可变限速值变化
Figure 12. Variable speed limit of section 1 under different CAV penetration rates

图 14 总行程时间与渗透率关系
Figure 14. Relationship between total travel time and penetration rates
表 1 CTM基本参数值
Table 1. Basic parameter values of CTM
参数 瓶颈1 瓶颈2 自由流速度/(km/h) 110 110 最大通行能力/(veh/h) 5 920 4 320 下降后通行能力/(veh/h) 5 180 3 790 冲击波波速/(km/h) 15.80 17.53 临界密度/(veh/km) 53.82 39.27 阻塞密度/(veh/km) 428.57 285.71  下载: 导出CSV
下载: 导出CSV
表 2 车辆运动模型基本参数
Table 2. Basic parameters of vehicle motion model
参数 CAV HDV amax/(m/s2) 2.5 2.5 b0/m 2 2 τh/s 0.5 1.2 bmax/(m/s2) 2 2 bsafe/(m/s2) 4.5 4.5 L/m 5 5 γ 4 4 κ 0.5 0.1 Δath/(m/s2) 0.3 0.3
下载: 导出CSV
表 3 不同控制策略下评估结果
Table 3. Evaluation results under different control strategies
控制类型 无控制 仅VSL 协同控制 TTT/h 529.71 357.92 239.64 TSD/(km/h) 21 921.53 4 096.67 2 884.77 变道率/% 72.34 80.92 76.16 平均CO2/g 960.25 751.59 646.73 平均NOx/g 0.376 5 0.290 2 0.247 8 平均油耗/g 0.412 8 0.323 1 0.278 1
下载: 导出CSV
-
[1] ZHAO X, XU W, MA J, et al. Effects of connected vehicle-based variable speed limit under different foggy conditions based on simulated driving[J]. Accident Analysis & Prevention, 2019, 128: 206-216. [2] LYU P, LIN Y, WANG L, et al. Variable speed limit control for delay and crash reductions at freeway work zone area[J]. Journal of Transportation Engineering, Part A: Systems, 2017, 143(12): 04017062. doi: 10.1061/JTEPBS.0000099 [3] 于德新, 刘珩, 郑黎黎, 等. 高速公路瓶颈区域可变限速控制方法[J]. 交通运输系统工程与信息, 2018, 18(3): 120-125. https://www.cnki.com.cn/Article/CJFDTOTAL-YSXT201803019.htmYU D X, LIU H, ZHENG L L, et al. Variable speed limit control method for freeway bottleneck area[J]. Journal of Transportation Systems Engineering and Information Technology, 2018, 18(3): 120-125. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-YSXT201803019.htm [4] HAN Y, CHEN D, AHN S. Variable speed limit control at fixed freeway bottlenecks using connected vehicles[J]. Transportation Research Part B: Methodological, 2017, 98: 113-134. doi: 10.1016/j.trb.2016.12.013 [5] PAPAGEORGIOU M, KOSMATOPOILOS E, PAPAMICHAIL I. Effects of variable speed limits on motorway traffic flow[J]. Transportation Research Record, 2008, 2047(1): 37-48. doi: 10.3141/2047-05 [6] WANG Y, IOANNOU P A. New model for variable speed limits[J]. Transportation Research Record, 2011, 2249(1): 38-43. doi: 10.3141/2249-06 [7] HAO W, ZHANG Z, GAO Z, et al. Research on mandatory lane-changing behavior in highway weaving sections[J]. Journal of Advanced Transportation, 2020, 2020. [8] 李霞, 李明烨, 张孝铭, 等. 人机混驾交通流交织区换道模型切换控制策略[J]. 交通信息与安全, 2022, 40(6): 45-52, 62. doi: 10.3963/j.jssn.1674-4861.2022.06.005LI X, LI M Y, ZHANG X M, et al. Switching control secision of lane-changing model in interweaving areas of mixed traffic flow with human-driving and autonomous vehicles[J]. Journal of Transport Information and Safety, 2022, 40(6): 45-52, 62. doi: 10.3963/j.jssn.1674-4861.2022.06.005 [9] DONG C, WANG H, LI Y, et al. Route control strategies for autonomous vehicles exiting to off-ramps[J]. IEEE Transactions on Intelligent Transportation Systems, 2019, 21(7): 3104-3116. [10] ZHANG Y, IOANNOU P A. Combined variable speed limit and lane change control for highway traffic[J]. IEEE Transactions on Intelligent Transportation Systems, 2016, 18(7): 1812-1823. [11] 张存保, 江周, 李薇, 等. 高速公路关联施工区可变限速协调控制方法[J]. 武汉理工大学学报(交通科学与工程版), 2017, 41(6): 905-909. doi: 10.3963/j.issn.2095-3844.2017.06.003ZHANG C B, JIANG Z, LI W, et al. Coordinated control method of variable speed limits for correlative work zones of freeway[J]. Journal of Wuhan University of Technology (Transportation Science and Engineering Edition), 2017, 41 (6): 905-909. (in Chinese) doi: 10.3963/j.issn.2095-3844.2017.06.003 [12] DO W, ROUHANI O M, MIRANDA-MORENO L. Simulation-based connected and automated vehicle models on highway sections: A literature review[J]. Journal of Advanced Transportation, 2019, 2019. [13] RIOS-TORRES J, MALIKOPOULOS A A. Impact of connected and automated vehicles on traffic flow[C]. 2017 IEEE 20th International Conference on Intelligent Transportation Systems(ITSC), Mielparque Yokohama: IEEE, 2017. [14] GUO Y, XU H, ZHANG Y, et al. Integrated variable speed limits and lane-changing control for freeway lane-drop bottlenecks[J]. IEEE Access, 2020(8): 54710-54721. [15] 孙剑, 殷炬元, 黎淘宁. 快速路入口匝道瓶颈宏观交通流模型[J]. 交通运输工程学报, 2019, 19(3): 122-133. https://www.cnki.com.cn/Article/CJFDTOTAL-JYGC201903013.htmSUN J, YIN J Y, LI T N. Macroscopic traffic flow model of expressway on-ramp bottlenecks[J]. Journal of Traffic and Transportation Engineering, 2019, 19(3): 122-133. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-JYGC201903013.htm [16] 潘义勇, 王松. 网联自动驾驶环境下改进的加权MOBIL自主性换道决策模型[J]. 重庆交通大学学报(自然科学版), 2021, 40(5): 46-52, 101. https://www.cnki.com.cn/Article/CJFDTOTAL-CQJT202105008.htmPAN Y Y, WANG S. Improved weighted MOBIL decision model for autonomous lane change in networked autopilot environment[J]. Journal of Chongqing Jiaotong University(Natural Science Edition), 2021, 40(5): 46-52, 101. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-CQJT202105008.htm [17] ZHOU M, QU X, JIN S. On the impact of cooperative autonomous vehicles in improving freeway merging: A modified intelligent driver model-based approach[J]. IEEE Transactions on Intelligent Transportation Systems, 2016, 18(6): 1422-1428. [18] TOLEDO T, ZOHAR D. Modeling duration of lane changes[J]. Transportation Research Record, 2007, 1999(1): 71-78. [19] 何勇, 唐琤琤. 道路交通安全技术[M]. 北京: 人民交通出版社, 2008.HE Yong, TANG Cheng. Road traffic safety technology[M]. Beijing: China Communications Press, 2008. [20] YU M, FAN W D. Optimal variable speed limit control at a lane drop bottleneck: Genetic algorithm approach[J]. Journal of Computing in Civil Engineering, 2018, 32(6): 04018049. -



 点击查看大图
点击查看大图
计量
- 文章访问数: 1003
- HTML全文浏览量: 444
- PDF下载量: 69
- 被引次数: 0