

A Car-following Model for Expressway under Foggy Weather Based on Transfer Learning and LSTM with Small-sample
-
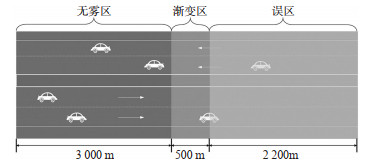
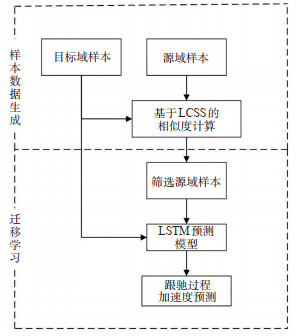
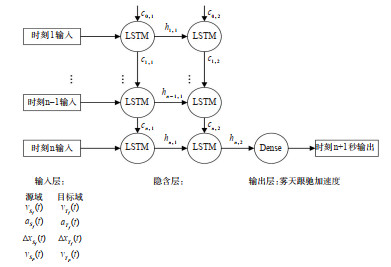
摘要: 由于在现实生活中能够采集到的不同雾天等级的高速公路车辆跟驰样本有限,导致雾天跟驰模型精度不佳,为此在长短时记忆神经网络(long short-term memory,LSTM)跟驰模型的基础上,采用迁移学习(transfer learning,TL)方法来提升雾天跟驰模型的性能。利用驾驶模拟实验平台搭建高速公路雾天与正常天气2种实验场景进行驾驶模拟实验,获得296组正常天气下(源域)的跟驰样本与100组雾天下(目标域)的跟驰样本。提出了基于最长公共子序列(longest common sequence solution,LCSS)的迁移样本选择方法,从源域中选出100个样本迁移至目标域中,通过扩大训练样本提升LSTM从源域、目标域特征到目标域输出的端对端泛化学习能力,得到雾天高速公路车辆跟驰模型。为对比所提样本迁移方法对LSTM模型的效用,将LSTM-TL模型与训练样本全部来源于源域的LSTM-S模型和训练样本全部来源于目标域的LSTM-T模型进行对比,LSTM-TL模型的均方误差、均方根误差和平均绝对误差比LSTM-S模型分别减小47.5%、27.7%和46.5%,比LSTM-T模型减小31.1%、17.0%和29.9%。为对比不同模型在仅有100组目标域样本时的性能,将LSTM-TL模型与Gipps、IDM、BP这3个模型进行对比,LSTM-TL模型的均方误差、均方根误差和平均绝对误差比3个模型中表现最优的Gipps模型减小18.5%、8.0%和25.9%。结果表明:直接将LSTM-S模型应用于目标域的预测,其精度不高,采用样本迁移合理可行;LCSS方法对源域样本筛选有效,由100个源域样本迁移到目标域训练得到的LSTM-TL模型的精度最高;在小样本情况下,拥有较少参数的Gipps模型预测精度优于LSTM-T或LSTM-S模型,但由于迁移学习能够从源域样本中获取知识的特性,LSTM-TL模型有着最高的精度。Abstract: Due to the fact that it is difficult to collect car-following samples at different fog levels and the samples that can be collected are limited, and the accuracy of car-following models is generally poor under the condition of foggy weather. A transfer learning (TL) approach is used to improve the performance of a car-following model under the condition of foggy weather based on the long short-term memory (LSTM) neural network technique. A driving simulator is used to set up two types of experimental scenes (normal and foggy weather) for driving experiments on an expressway. Driving behavior data from 296 groups of car-following samples under the condition of normal weather (source domain), and 100 groups of car-following samples under the condition of foggy weather (source domain) is collected. A selection method for transfer samples is proposed based on the longest common sequence solution (LCSS). 100 samples are selected from the source domain and transferred to the target domain. The end-to-end generalization learning capability of the LSTM from features of both source and target domains to output of target domain is improved by expanding the training samples to develop a car-following model for expressway under the condition of foggy weather. To compare the utility of the proposed method in improving the LSTM model, the LSTM-TL model is compared with the LSTM-S model with all training samples from the source domain, and the LSTM-T model with all training samples from the target domain. The mean square error (MSE), root mean square error (RMSE), and mean absolute error (MAE) of the LSTM-TL model is 47.5%, 27.7%, and 46.5% less than the LSTM-S model respectively; while 31.1%, 17.0%, and 29.9% less than the LSTM-T model. To compare the performance of different models when only 100 groups of samples from the target domain are available, the LSTM-TL model is compared with three models, Gipps, IDM, and BP. The MSE, RMSE, and MAE of the LSTM-TL model is 18.5%, 8.0%, and 25.9% less than the Gipps model respectively, which performs best among the three models. Study results also show that the LSTM-S model has poor prediction accuracy when directly applied to the prediction of the target domain, and the use of sample transfer can significantly improve its accuracy. The LCSS method is effective for sample screening from the source domain, and the LSTM-TL model trained by transferring 100 samples from the source domain to the target domain has the highest accuracy. In case of a small sample, the Gipps model with fewer parameters has a better prediction accuracy than the LSTM-T or LSTM-S models. However, the LSTM-TL model still achieves the highest accuracy among all of the above models, due to the fact that the transfer learning can transfer useful knowledge from source domain samples to the target domain.
-
Key words:
- traffic engineering /
- LSTM-NN /
- transfer learning /
- car-following model /
- fog condition
-
表 1 跟驰样本统计信息
Table 1. Car-following sample statistics
场景 速度(/km/h) 加速度(/m/s2) 车头间距/m 均值 标准差 最大值 最小值 标准差 均值 标准差 雾天 61.660 15.595 3.335 -7.393 0.685 51.463 20.365 正常 78.812 6.860 1.351 -7.545 0.484 65.156 27.722  下载: 导出CSV
下载: 导出CSV
表 2 各实验组样本构成
Table 2. Sample composition of each experimental group
实验组别 训练样本数量/个 目标域 源域 组1 90 50 组2 90 100 组3 90 150 组4 90 200 组5 90 250 组6 90 296
下载: 导出CSV
表 3 实验组结果
Table 3. Results of each group
实验组别 训练样本数量/个 均方误差 均方根误差 平均绝对误差 目标域 源域 组1 90 50 0.344 0.587 0.303 组2 90 100 0.195 0.442 0.212 组3 90 150 0.206 0.454 0.211 组4 90 200 0.240 0.489 0.253 组5 90 250 0.257 0.506 0.248 组6 90 296 0.292 0.540 0.240
下载: 导出CSV
表 4 模型参数标定结果
Table 4. Parameters values of model after calibrations
模型 参数 解释 均值 标准差 Gipps Vn/(m/s) 跟驰车辆期望的速度 16.68 2.63 an/(m/s2) 跟驰车辆期望加速度 0.10 0.06 bn/(m/s2) 跟驰车辆期望减速度 4.78 0.88 bn - 1/(m/s2) 驾驶员估计前车突然刹车时的最大减速度 1.84 0.67 IDM Vmax/(m/s) 跟驰车辆的期望车速 17.16 3.16 amax(n)/(m/s2) 驾驶人期望的最大加速度 0.30 0.23 bn/(m/s2) 跟驰车辆期望减速度 4.96 0.51 T(n)/s 驾驶人期望的车头时距 3.99 0.31 s0(n) /m 跟驰车辆停车时期望的车头间距 124.60 15.43 s1(n) 距离参数 3.68 0.84 δ 加速参数 4.05 1.16
下载: 导出CSV
表 5 模型结果对比
Table 5. Comparison results of each model
模型 训练样本数量/个 均方误差 均方根误差 平均绝对误差 目标域 源域 LSTM-TL 90 100 0.195 0.442 0.212 LSTM-T 90 0 0.283 0.532 0.302 LSTM-S 0 90 0.373 0.611 0.396 Gipps 90 0 0.231 0.48 0.267 IDM 90 0 0.279 0.528 0.304 BP 90 0 0.396 0.629 0.419
下载: 导出CSV
表 6 实验组结果
Table 6. Results of each group
实验组别 训练样本数量/个 均方误差 均方根误差 平均绝对误差 目标域 源域 组7 90 后100 0.312 0.558 0.289 组2 90 前100 0.195 0.442 0.212
下载: 导出CSV
-
[1] 陈学浩, 季君, 江海龙. 浅析雾天高速公路事故成因及管控要点[J]. 中国公共安全(学术版), 2010, 20(3): 96-98. doi: 10.3969/j.issn.1672-2396.2010.03.022CHEN X H, JI Q, JIANG H L. Analysis of highway traffic accidents causes and traffic control points in the fog[J]. China Public Security(Academy Edition), 2010, 20(3): 96-98. (in Chinese) doi: 10.3969/j.issn.1672-2396.2010.03.022 [2] KANG J, NI R, ANDERSEN G. Effects of reduced visibility from fog on car-following performance[J]. Transportation Research Record: Journal of the Transportation Research Board, 2008(2069): 9-15. [3] BROOKS J O, CRISLER M C, KLEIN N, et al. Speed choice and driving performance in simulated foggy conditions[J]. Accident Analysis & Prevention, 2011, 43(3): 698-705. [4] WHITE M E, JEFFERY D J. Some aspects of motorway traffic behaviour in fog[R]. Crowthorne, UK: Transport and Road Research Laboratory, 1980. [5] SAFFARIAN M, HAPPEE R, WINTER J C F. Why do driv ers maintain short headways in fog? A driving-simulator study evaluating feeling of risk and lateral control during automated and manual car following[J]. Ergonomics, 2012, 55 (9): 971-985. doi: 10.1080/00140139.2012.691993 [6] 薛晴婉, 徐嘉伟, 闫学东, 等. 雾天驾驶人车辆操纵行为特性及其与追尾风险相关性分析[J]. 交通信息与安全, 2022, 40 (1): 19-27. doi: 10.3963/j.jssn.1674-4861.2022.01.003XUE Q W, XU J W, YAN X D, et al. A study on the correlation between vehicle control behaviors and rear-end collision risk under foggy conditions[J]. Journal of Transport Information and Safety, 2022, 40(1): 19-27. (in Chinese) doi: 10.3963/j.jssn.1674-4861.2022.01.003 [7] BROUGHTON K L M, SWITZER F, SCOTT D. Car following decisions under three visibility conditions and two speeds tested with a driving simulator[J]. Accident Analysis & Prevention, 2007, 39(1): 106-116. [8] 高坤, 涂辉招, 时恒, 等. 雾霾天气低能见度对不同跟驰状态驾驶行为的影响[J]. 吉林大学学报(工学版), 2017, 47 (6): 1716-1727. doi: 10.13229/j.cnki.jdxbgxb201706007GAO K, TU H Z, SHI H, et al. Effect of low visibility in haze weather condition on longitudinal driving behavior in different car-following stages[J]. Journal of Jilin University(Engineering and Technology Edition), 2017, 47(6): 1716-1727. (in Chinese) doi: 10.13229/j.cnki.jdxbgxb201706007 [9] HOOGENDOORN R G, HOOGENDOORN S P, BROOKHUIS K A, et al. Simple and multi-anticipative car-following models: performance and parameter value effects in case of fog[C]. The Transportation Research Board (TRB)Traffic Flow Theory and Characteristics Committee(AHB45)Summer Meeting, Annecy, France: TRB, 2010. [10] 刘兆惠, 虞春滨, 王超, 等. 雾天环境对高速公路车辆跟驰安全的影响[J]. 重庆交通大学学报(自然科学版), 2019, 38 (9): 88-94. doi: 10.3969/j.issn.1674-0696.2019.09.15LIU Z H, YU C B, WANG C, et al. Influence of foggy environment on expressway car-following safety[J]. Journal of Chongqing Jiaotong University(Natural Science), 2019, 38 (9): 88-94. (in Chinese) doi: 10.3969/j.issn.1674-0696.2019.09.15 [11] 于乐美, 张萌萌, 王星月. 基于跟驰模型的雾天安全限速模拟研究[J]. 科学技术与工程, 2018, 18(33): 224-229. doi: 10.3969/j.issn.1671-1815.2018.33.035YU L M, ZHANG M M, WANG X Y. Simulation study on safety speed limit of fog weather based on car following model[J]. Science Technology and Engineering, 2018, 18 (33): 224-229. (in Chinese) doi: 10.3969/j.issn.1671-1815.2018.33.035 [12] 刘展宏, 杨秀建, 吴相稷, 等. 基于元胞自动机的雾天车辆跟驰建模与仿真[J]. 系统仿真学报, 2021, 33(10): 2399-2410. doi: 10.16182/j.issn1004731x.joss.20-0598LIU Z H, YANG X J, WU X J, et al. Modeling and simulation of car following in fog based on cellular automata[J]. Journal of System Simulation, 2021, 33(10): 2399-2410. (in Chinese) doi: 10.16182/j.issn1004731x.joss.20-0598 [13] TAN J, GONG L, QIN X. An extended car-following model considering the low visibility in fog on a highway with slopes[J]. International Journal of Modern Physics C, 2019, 30(11): 1950090. doi: 10.1142/S0129183119500906 [14] GONG B, WANG F, LIN C, et al. Modeling HDV and CAV mixed traffic flow on a foggy two-lane highway with cellular automata and game theory model[J]. Sustainability, 2022, 14 (10): 5899. doi: 10.3390/su14105899 [15] HUANG Y, YAN X, LI X, et al. Improving car-following model to capture unobserved driver heterogeneity and following distance features in fog condition[J/OL]. (2022-03-20) [2022-03-30]. https://doi.org/10.1080/23249935.2022.2048917 [16] PANWAI S, DIA H. Neural agent car-following models[J]. IEEE Transactions on Intelligent Transportation Systems, 2007, 8(1): 60-70. doi: 10.1109/TITS.2006.884616 [17] HUANG X, SUN J, SUN J. A car-following model considering asymmetric driving behavior based on long short-term memory neural networks[J]. Transportation Research Part C: Emerging Technologies, 2018(95): 346-362. [18] ZHOU M, QU X, LI X. A recurrent neural network based microscopic car following model to predict traffic oscillation[J]. Transportation Research Part C: Emerging Technologies, 2017(84): 245-264. [19] 孙倩, 郭忠印. 基于长短期记忆神经网络方法的车辆跟驰模型[J]. 吉林大学学报(工学版), 2020, 50(4): 1380-1386.SUN Q, GUO Z Y. Vehicle following model based on long short⁃term memory neural network[J]. Journal of Jilin University(Engineering and Technology Edition), 2020, 50(4): 1380-1386. (in Chinese) [20] YAO Y, DORETTO G. Boosting for transfer learning with multiple sources[C]. 2010 IEEE Computer Society Conference on Computer Vision and Pattern Recognition, San Francisco, USA: IEEE, 2010. [21] 刘三民, 刘余霞. 基于实例迁移的数据流分类挖掘方法[J]. 信息与控制, 2019, 48(3): 380-384.LIU S M, LIU Y X. Classification mining method for data streams based on instances transfer[J]. Information and Control, 2019, 48(3): 380-384. (in Chinese) [22] 闻克宇, 赵国堂, 何必胜, 等. 基于改进迁移学习的高速铁路短期客流时间序列预测方法[J]. 系统工程, 2020, 38(3): 73-83.WEN K Y, ZHAO G T, HE B S, et al. An improved transfer learning based on time series prediction method for the high-speed rail short-term volume[J]. Systems Engineering, 2020, 38(3): 73-83. (in Chinese) [23] 中华人民共和国国家质量监督检验检疫总局. 雾的预报等级: GB/T 27964—2011[S]. 北京: 中国标准出版社, 2012.General Administration of Quality Supervision, Inspection and Quarantine of the People's Republic of China. Grade of fog forecast: GB/T 27964—2011[S]. Beijing: Standards Press of China, 2012. (in Chinese) [24] 中华人民共和国国家质量监督检验检疫总局. 道路交通标志和标线: GB 5768—2009[S]. 北京: 中国标准出版社, 2009.General Administration of Quality Supervision, Inspection and Quarantine of the People's Republic of China. Road traffic signs and markings: GB 5768—2009[S]. Beijing: Standards Press of China, 2009. (in Chinese) [25] 王雪松, 朱美新, 邢祎伦. 基于自然驾驶数据的避撞预警对跟车行为影响[J]. 同济大学学报(自然科学版), 2016, 44 (7): 1045-1051. https://www.cnki.com.cn/Article/CJFDTOTAL-TJDZ201607010.htmWANG X S, ZHU M X, XING Y L. Impacts of collision warning system on car-following behavior based on naturalistic driving data[J]. Journal of Tongji University(Natural Science), 2016, 44(7): 1045-1051. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-TJDZ201607010.htm [26] 郭文月, 刘海砚, 孙群, 等. 利用最长公共子序列度量线要素相似性的方法[J]. 测绘科学技术学报, 2018, 35(5): 518-523. https://www.cnki.com.cn/Article/CJFDTOTAL-JFJC201805015.htmGUO W Y, LIU H Y, SUN Q, et al. A geometric similarity measure method of linear features based on longest common sequence[J]. Journal of Geomatics Science and Technology, 2018, 35(5): 518-523. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-JFJC201805015.htm [27] HOCHREITER S, SCHMIDHUBER J. Long short-term memory[J]. Neural Computation, 1997, 9(8): 1735-1780. [28] 张耀伟. 面向多场景的循环神经网络与Gipps组合的车辆跟驰模型研究[D]. 北京: 北京工业大学, 2020.ZHANG Y W. Research on car-following model combining recurrent neural network and Gipps for multiple scenarios[D]. Beijing: Beijing University of Technology, 2020. [29] 黄岩, 闫学东, 李晓梦, 等. 基于多用户驾驶模拟平台的雾天高速公路跟驰模型参数标定及验证[J]. 中国公路学报, 2022, 35(8): 320-330.HUANG Y, YAN X D, LI X M, et al. Parameters calibration and validation for car-following models in freeway under foggy conditions based on multi-user driving simulator system[J]. China Journal of Highway and Transport, 2022, 35 (8): 320-330. (in Chinese) [30] TREIBER M, HENNECKE A, HELBING D. Congested Traffic states in empirical observations and microscopic simulations[J]. Physical Review E, 2000, 62(2): 1805-1824. [31] HOOGENDOORN R G, TAMMINGA G, HOOGENDOORN S P, et al. Longitudinal driving behavior under adverse weather conditions: Adaptation effects, model performance and freeway capacity in case of fog[C]. 13th International IEEE Conference on Intelligent Transportation Systems, Funchal, Portugal: IEEE, 2010. -



 点击查看大图
点击查看大图

计量
- 文章访问数: 720
- HTML全文浏览量: 268
- PDF下载量: 51
- 被引次数: 0