

A Method for Safe Moving Paths and Tracking & Control of the Trajectory of Towed Taxiing-in Aircrafts
-
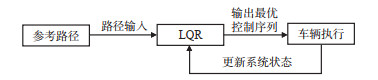
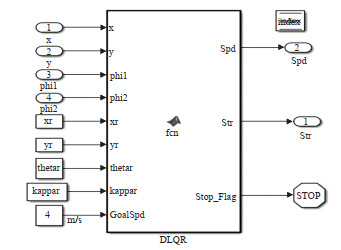
摘要: 针对飞机紧急降落后无法继续利用自身动力滑行入港场景,研究使用牵引车牵引其滑行入港的方式,考虑牵引滑入时机轮与机场跑道及滑行道边缘的安全净距,分别提出适用于机型-机场匹配时的牵引车-飞机系统的铰接点过中心线(HPOC)法和不匹配时的飞机主起落架几何中心过中心线(GCOC)法,并基于2种方法建立运动学模型,在净距及飞机前轮转角约束下对系统转弯滑行入港运动进行轨迹规划。基于GCOC法建立连续非线性系统的轨迹跟踪模型,通过线性二次调节器(LQR)对不同权重系数及存在初始偏差的轨迹跟踪问题进行了研究。结果表明:牵引车以HPOC法牵引飞机在与其机型不匹配的机场滑行入港时,机轮会发生碰撞危险;而采用GCOC法时其运动轨迹可以满足跑道及滑行道边缘的安全净距要求。在对系统进行轨迹跟踪控制时,当将飞机主起落架几何中心的横、纵坐标权重系数Q1、Q2及表示飞机姿态的角度权重系数Q3均设为100,而表示牵引车姿态的角度权重系数Q4设为0时,即:Q=(100,100,100,0),该方法可将实际牵引滑行入港轨迹与参考轨迹的偏差保持在0.05~0.1 m以内,且能够在10 s左右抑制系统状态变量误差,并使控制变量达到稳定;同时能够在12 s左右修正系统的初始偏差,相较于单机偏差修正的10 s,具有可接受的效果。Abstract: Under the circumstance that an aircraft cannot use its own power to taxi into a port after an emergency landing, towing the aircraft to the port using an aircraft tractor is necessary. Considering the safety clearance between aircraft wheels and airport runway, a hinge point over centerline(HPOC)method for the scenarios where the type of aircraft matches the airport category, and a geometric center over centerline(GCOC)method for the scenarios where the type of aircrafts does not match the airport category, is proposed, respectively. Based on these two methods, a dynamics model of the system is developed. Under the constraints of safety clearance and the aircraft's front angle, trajectory planning of the tractor-aircraft system is carried out. Based on the GCOC method, a continuous nonlinear trajectory tracking model is developed. The trajectory tracking problem with different weights and initial deviations is studied using a linear quadratic regular(LQR)method. Study results show that on an unmatched airport runway, when the tractor-aircraft system is taxiing in using the HPOC method, the wheels of the aircraft would potentially collide with. In contrast, the GCOC method can be used to meet the requirement of the minimum distance between the wheels of aircrafts and the edge of airport runways and taxiways. In the process of trajectory tracking and control for the system, when the weights for the horizontal and vertical coordinates of the geometric center of the aircraft main landing gear(Q1 and Q2), and the angle representing the attitude of the aircraft(Q3)are set to 100, and that for the angle representing the attitude of the tractor(Q4)is set to 0, that is, Q=(100, 100, 100, 0), the deviations between the actual and the reference trajectory are found to be between 0.05 and 0.1 m. The method can control the errors of the variables for measuring the system state within about 10 s and thus ensure the system maintains a stable state. Correction of the initial deviation can be done within 12 s, and the time span for the correction is acceptable compared to the time required(10 s)for the correction under the scenarios where the aircraft is taxiing in alone.
-

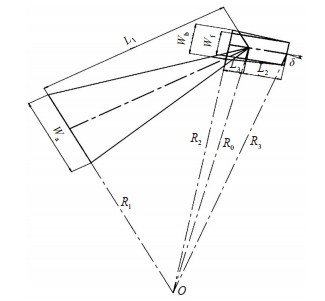
图 1 新净距安全评估几何模型
Wf-牵引车前轮距;Wb-牵引车后轮距;L1为飞机轴距;L2-牵引车前轮几何中心与铰接点的距离;L3-铰接点与牵引车后轮几何中心的距离;Wa-飞机轮距;R0-铰接点转弯半径;R1-飞机主起落架中心转弯半径;R2-牵引车后轮中心转弯半径;R3-牵引车前轮中心转弯半径。
Figure 1. Geometric model of new clearance safety assessment

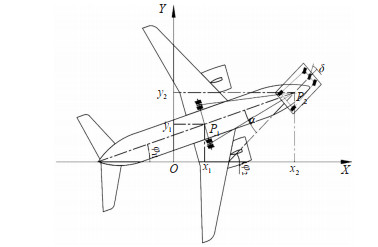
图 3 牵引车-飞机系统运动关系图
XOY-为地面坐标系;P2-无杆牵引系统的铰接点;P1-飞机主起落架几何中心点;δ-牵引车前2轮中心位置的转向角;φ1,φ2为飞机和牵引车的轴向与横坐标之间的夹角;α为飞机的前轮转弯角(牵引车车身与飞机机身的夹角);v1,v2分别为飞机和牵引车的速度。
Figure 3. Motion diagram of HPOC method

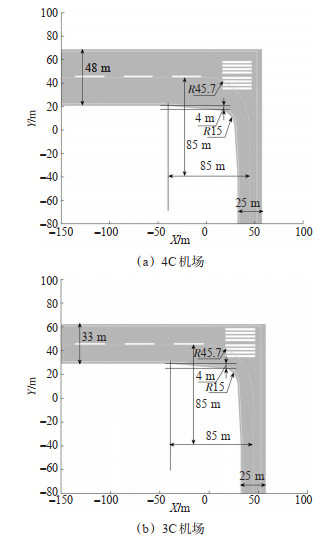
图 4 HPOC法可视化仿真分析图(4C机场)
Figure 4. Visual simulation analysis diagram of HPOC method(4C)

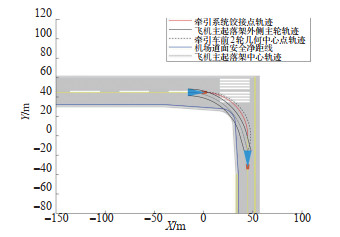
图 5 HPOC法可视化仿真分析图(3C机场)
Figure 5. Visual simulation analysis diagram of HPOC method(3C)

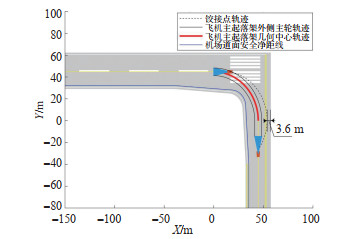
图 6 GCOC法可视化仿真分析图(3C机场)
Figure 6. Visual simulation analysis diagram of GCOC method(3C)

图 11 不同权重系数下的控制变量增量
Figure 11. Control variables increment with different weight coefficients

图 13 不同初始偏差下的控制变量增量
Figure 13. Control variables increment with different initial deviations

图 14 存在初始偏差的轨迹跟踪控制结果
Figure 14. Trajectory tracking control results with initial deviation
表 1 牵引车-飞机系统关键点坐标
Table 1. Parameters of traction taxi system
关键点 X Y 铰接点 x2 y2 飞机主起落架几何中心 x1 y1 飞机主起落架外侧左轮 $x_3=x_1-\frac{w_{a 1}}{2} \sin \theta_1 $ $y_3=y_1+\frac{w_{a 1}}{2} \cos \theta_1 $ 飞机主起落架外侧右轮 $ x_4=x_1+\frac{w_{a 1}}{2} \sin \theta_1$ $y_4=y_1-\frac{w_{a 1}}{2} \cos \theta_1 $  下载: 导出CSV
下载: 导出CSV
表 2 无杆牵引系统参数
Table 2. Parameters of traction taxi system
单位: m 参数 数值 牵引车轴距L 4.5 牵引车前轮距Wf 2.1 牵引车后轮距Wb 2.7 B737-800飞机轴距L1 15.6 B737-800飞机外侧轮距Wa1 7 牵引车前2轮几何中心与铰接点距离L2 2.968 铰接点与牵引车后2轮几何中心距离L3 1.534
下载: 导出CSV
表 3 阿克曼转向原理计算结果与仿真结果的比较
Table 3. Comparison of Results Calculated from the Ackerman Steering Principle and Simulation
牵引滑行方法 参数 计算得到的半径值/m 仿真得到的半径值/m HPOC R0 45.7 45..7 R1 43.0 42.2 R3 46.0 45.1 GCOC R0 48.2 48.0 R1 45.7 45.7
下载: 导出CSV
表 4 不同权重系数
Table 4. Different weight coefficients
案例 Q1 Q2 Q3 Q4 1 5 5 5 0 2 10 10 10 0 3 100 100 100 0 4 1 000 1 000 1 000 0
下载: 导出CSV
表 5 不同初始偏差参数
Table 5. Different initial deviation
案例 △x1/m △y1/m △φ1/rad △φ2/rad 5 0.5 0.5 0.02 0 6 0.3 0.8 -0.1 0 7 0.5 -0.7 -0.05 0 8 0.8 0.2 0.1 0
下载: 导出CSV
-
[1] 中国民用航空局. 飞机航线运营应进行的飞机性能分析: AC-121FS—006[S]. 北京: 飞行标准司, 2001.Civil Aviation Administration of China. Aircraft performance analysis to be conducted for aircraft route operation: AC-121FS—006[S]. Beijing: Flight Standards Division, 2001. (in Chinese). [2] 刘洁, 韩维, 徐卫国, 等. 基于滚动时域的舰载机甲板运动轨迹跟踪最优控制[J]. 航空学报, 2019, 40(8): 175-200.LIU J, HAN W, XU W G, et al. Optimal path tracking control of carrier-based aircraft on the deck based on RHC[J]. Acta Aeronautica ET Astronautica Sinica, 2019, 40(8): 175-200. (in Chinese) [3] 刘洁, 董献洲, 韩维, 等. 采用牛顿迭代保辛伪谱算法的舰载机甲板路径规划[J]. 浙江大学学报(工学版), 2020, 54(9): 1827-1838. https://www.cnki.com.cn/Article/CJFDTOTAL-ZDZC202009021.htmLIU J, DONG X Z, HAN W, et al. Trajectory planning for carrier aircraft on deck using Newton Symplectic Pseudo-spectral method[J]. Journal of Zhejiang University(Engineering Science), 2020, 54(9): 1827-1838. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-ZDZC202009021.htm [4] 董健康, 王洁宁, 王安国, 等. 飞机推出和跑道掉头滑行行为计算方法[J]. 航空学报, 2012, 33(12): 2183-2191. https://www.cnki.com.cn/Article/CJFDTOTAL-HKXB201212004.htmDONG J K, WANG J N, WANG A G, et al. Aircraft behavior simulation investigation during pushback and U-turn maneuvers[J]. Acta Aeronautica et Astronautica Sinica, 2012, 33(12): 2183-2191. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-HKXB201212004.htm [5] 周丽杰. 舰船上牵引车-飞机系统稳定性研究[D]. 哈尔滨: 哈尔滨工程大学, 2012.ZHOU L J. Research of stability for tractor-airplane system on ship[D]. Harbin: Harbin Engineering University, 2012. (in Chinese) [6] 王能建, 刘红博, 周丽杰. 甲板上舰载机牵引系统的行驶特性分析[J]. 中南大学学报(自然科学版), 2013, 44(6): 2304-2310. https://www.cnki.com.cn/Article/CJFDTOTAL-ZNGD201306017.htmWANG N J, LIU H B, ZHOU L J. Moving characteristics analysis of carrier-based aircraft traction system on deck[J]. Journal of Central South University(Science and Technology), 2013, 44(6): 2304-2310. https://www.cnki.com.cn/Article/CJFDTOTAL-ZNGD201306017.htm [7] LEE J, CHUNG W, KIM M, et al. A passive multiple trailer system with off-axle hitching[J]. International Journal of Control Automation and Systems, 2004, 2(3): 289-297. [8] ZOBEL D. Trajectory segmentation for the autonomous control of backward motion for truck and trailer[C]. 5th IEEE International Conference on Intelligent Transportation Systems, Singapore: ITSC, 2002. [9] 林熊熊. 半挂汽车列车弯路运动轨迹计算机仿真[J]. 汽车工程, 1997, 19(1): 60-65. https://www.cnki.com.cn/Article/CJFDTOTAL-QCGC199701011.htmLIN X X. Computer simulation on trajectory of semi-trailer train on turning path[J]. Automotive Engineering, 1997, 19(1): 60-65. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-QCGC199701011.htm [10] 林棻, 倪兰青, 赵又群, 等. 考虑横向稳定性的智能车辆路径跟踪控制[J]. 华南理工大学学报(自然科学版), 2018, 46(1): 78-84. https://www.cnki.com.cn/Article/CJFDTOTAL-HNLG201801011.htmLIN F, NI L Q, ZHAO Y Q, et al. Path following control of intelligent vehicles considering lateral stability[J]. Journal of South China University of Technology(Natural Science Edition), 2018, 46(1): 78-84. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-HNLG201801011.htm [11] 陈亮, 秦兆博, 孔伟伟, 等. 基于最优前轮侧偏力的智能汽车LQR横向控制[J]. 清华大学学报(自然科学版), 2021, 61(9): 906-912. https://www.cnki.com.cn/Article/CJFDTOTAL-QHXB202109004.htmCHEN L, QIN Z B, KONG W W, et al. Lateral control using LQR for intelligent vehicles based on the optimal front-tire lateral force[J]. Tsinghua University Journa(lNatural Science Edition), 2021, 61(9): 906-912. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-QHXB202109004.htm [12] 高琳琳, 唐风敏, 郭蓬, 等. 自动驾驶横向运动控制的改进LQR方法研究[J]. 机械科学与技术, 2021, 40(3): 435-441. https://www.cnki.com.cn/Article/CJFDTOTAL-JXKX202103018.htmGAO L L, TANG F M, GUO P, et al. Research on improved LQR control for self-driving[J]. Technology for Aerospace Engineering, 2021, 40(3): 435-441. (in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-JXKX202103018.htm [13] 张攀, 刘新杰, 张威, 等. 飞机牵引机器人路径跟踪模糊控制[J]. 计算机工程与应用, 2019, 55(16): 217-220+234. https://www.cnki.com.cn/Article/CJFDTOTAL-JSGG201916032.htmZHANG P, LIU X J, ZHANG W, et al. Fuzzy control for path tracking of aircraft traction robot[J]. Computer Engineering and Applications, 2019, 55(16): 217-220+234. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-JSGG201916032.htm [14] 周火凤, 马保离. 离轴式拖车移动机器人的路径跟踪控制[J]. 自动化学报, 2010, 36(9): 1272-1278. https://www.cnki.com.cn/Article/CJFDTOTAL-MOTO201009010.htmZHOU H F, MA B L. Path following control of tractor-trailers with off-axle hitching[J]. Acta Automatica Sinica, 2010, 36(9): 1272-1278. https://www.cnki.com.cn/Article/CJFDTOTAL-MOTO201009010.htm [15] Airbus. A380 Airplane Characteristics Manual[EB/OL]. (2010-5)[2022-10-16]. http://www.airbus.com/support/maintenance-engineering/technical-data/aircraft-characteristics/. [16] BERNATZKY T. Automation concept for cockpit crew integration into trajectory-based dispatch towing[D]. Darmstadt, Germany: Technische Universitaet Darmstadt, 2019. [17] LUKIC M, HEBALAA, et al. State of the art of Electric taxiing systems[C]. 2018 IEEE International Conference on Electrical Systems for Aircraft, Railway, Ship Propulsion and Road Vehicles & International Transportation Electrification Conference, Nottingham, United Kingdom: IEEE, 2018. [18] GUO R, ZHANG Y, et al. Comparison of emerging ground propulsion systems for electrified aircraft taxi operations[J]. Transportation Research Part C: Emerging Technologies, 2014, 44(1): 98-109. [19] ZAMMIT C, KRAUSKOPF B, et al. A control technique for automatic taxi in fixed wing aircraft[C]. 52nd Aerospace Sciences Meeting, National Harbor, Maryland: AIAA, 2014. [20] POSTORINO M N, MANTECCHINI L, et al. Improving taxi-out operations at city airports to reduce CO2 emissions[J]. Transport Policy, 2019, 80(8): 167-176. [21] HEIN K, BAUMANN. Acoustical comparison of conventional taxiing and dispatch towing-taxibot's contribution to ground noise abatement[C]. 30th Congress of the International Council of Aeronautical Sciences, Daejeon, Korea: DCC, 2016. [22] 中国民用航空局. 民用机场飞行区技术标准: MH 5001—2021[S]. 北京: 机场司, 2021.Civil Aviation Administration of China. Aerodrome technical standards: MH 5001—2021[S]. Beijing: Airport Division, 2021(in Chinese). [23] 谈至明, 姚尧, 陈景亮. 机场转弯滑行道增补面设计新方法[J]. 交通运输工程学报, 2016, 16(5): 10-16. https://www.cnki.com.cn/Article/CJFDTOTAL-JYGC201605002.htmTAN Z M, YAO Y, CHEN J L. New design method of supplemented surface for airport turnoff taxiway[J]. Journal of Traffic and Transportation Engineering, 2016, 16(5): 10-16. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-JYGC201605002.htm [24] KARKEE M, STEWARD B L. Study of the open and closed loop characteristics of a tractor and a single axle towed implement system[J]. Journal of Terramechanics. 2010, 47(6): 379-393. [25] ZAMMIT C, ZAMMMIT-MANGION D. A control technique for automatic taxi in fixed wing[C]. 52nd Aerospace Sciences Meeting, National Harbor, Maryland: AIAA, 2013. -








 点击查看大图
点击查看大图
计量
- 文章访问数: 866
- HTML全文浏览量: 307
- PDF下载量: 40
- 被引次数: 0