

A Review of Parameter Identification Methods for Ship Dynamic Models
-
摘要: 创建精确且可靠的运动模型是有效分析船舶操纵性和保障船舶智能航行的关键。相较于常用的船舶运动建模方法(包括经验法、试验法、计算流体动力学数值法),参数辨识技术是1种实用有效、迁移性强的建模手段,但因受到诸如船舶强非线性运动特性、时变耦合的环境干扰、内外多重不确定性等众多复杂因素的影响而面临极大挑战。围绕船舶运动模型参数辨识技术的4个核心内容,即最优输入设计、船舶运动数学模型、参数估计算法、辨识模型测试验证,重点梳理了富含操控特性的激励数据获取、多型船舶运动模型、经典-智能-混合参数辨识方法、辨识模型评估方法相关的研究现状,剖析了噪声干扰、参数漂移、参数时变、评价指标选取等主要问题,发现面对操纵与航行特征复杂的船舶,获取覆盖广域运动特征的高质量数据仍无较好方法,参数漂移现象与模型复杂度紧密相关,且无法完全避免。面向数据高质量化、辨识实时性、航行场景复杂化等的发展要求,对船舶运动模型参数辨识技术在船舶操纵运动数据获取与处理,如鲁棒估计与信息融合、鲁棒在线参数辨识、多新息智能算法、复杂场景下的船舶运动辨识建模如受限条件下船舶运动辨识建模等重点方面进行了展望。Abstract: Developing a dynamic model with a high accuracy and reliability is essential for analyzing ship maneuverability and ensuring shipping safety. Compared with the existing three popular methods, including empirical, experimental and computational fluid dynamics (CFD), numerical parameter identification methods are practical, effective, and powerful solutions for dynamic modeling. However, it faces major challenges due to the influences from the following factors, such as strong nonlinear motion characteristics of ships, varying environmental interfer-ences, and the multiple internal and external uncertainties. This paper reviews the state-of-the-art of parameter identification of ship dynamic models from the following four critical perspectives, including the optimal input design related to the informative characteristics acquisition, the mathematical model of ship motion, parameter estimation algorithms, and the verification and validation of the identified models. Several critical problems are discussed including noise interference, parameter drift, parameter variation, and selection of evaluation indexes. Based on a comprehensive survey, two challenging issues are pointed out. Currently, there is no method available that can provide high-quality data covering motion characteristics over a wide area, and due to the complexity of the models, the parameter drift fluctuates and cannot be completely avoided. Potential research questions closely related to the parameter identification of ship dynamic models are discussed. For instance, ship dynamic data acquired and processed using robust estimation techniques or information fusion techniques is worthy to be addressed to provide high-quality data; robust online parameter identification based on the multi-innovation intelligent approach can be a valuable solution to real-time identification of ship dynamic models; and complex conditions, such as ships sailing in restricted waters, should to be examined.
-

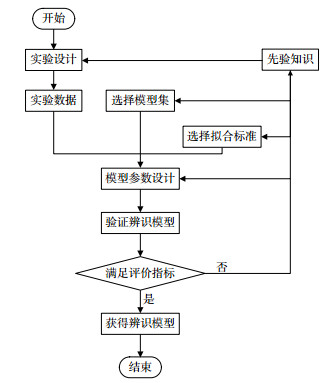
图 1 系统动态辨识建模流程图
Figure 1. Procedure of the identification-based modeling of system dynamics
表 1 输入信号类型对比分析
Table 1. Comparative analysis of input signal types
优化方法 输入信号类型 优点 缺点 船舶标准操纵 Z形操纵 满足船舶操作性标准的要求,易从可用的数据库中提取所需的数据集 对非线性系统以及噪声干扰下的辨识适用性不强 船舶标准操纵伪随机二进制序列 旋回操纵 标准船舶操纵运动,易产生与获得 抗噪声干扰差、不太适用于非线性系统辨识 A和D最优准则Mitchell算法 bang-bang型 能抑制低速船舶操纵运动模型中各参数间的共线性 1个或2个振幅的转向序列包含船舶非线性动态信息不足,对非线性系统辨识适用性不强 经验方法 多级伪随机序列
正弦信号
线性调频信号包含丰富的系统非线性动态特性,适于非线性运动辨识建模 实现难度较大,需要船舶频繁操车  下载: 导出CSV
下载: 导出CSV
表 2 船舶运动数学模型对比分析
Table 2. Comparative analysis of ship dynamic models
航行场景 模型类型 实验对象 研究发现 代表文献 低海况 简化的水平面3自由度矩阵向量模型 船模仿真与Ⅰ-Nav-Ⅱ无人艇实船 模型简化策略对构建不同船舶运动模型可行 [6][22] 静水 水平面3自由度MMG模型 双桨双舵内河船船模,包括6 700 t散货船和3 500 t油船 建立的船舶运动模型能描述船舶运动趋势,但精度不高,依赖于船舶结构属性以及船速等初始条件设置 [21][24] 低海况 水平面3自由度MMG模型 KVLCC2基准船船模 混合组合构建的模型存在较大不确定性,影响模型精度,需事先基于原型船进行合理调整 [25] 浅水域 MMG模型与准多项式相结合的水平面3自由度模型 DTC集装箱船船模 结合截断奇异值分解方法辨识构建船舶运动模型可在一定程度上消减浅水导致的不确定性影响 [26] 水平面3自由度MMG模型 货船船模 构建的模型能较好描述船舶浅水中的运动特性,船舶操纵性会随水深与吃水的比例减小而变差 [28] 岸壁效应 MMG模型与非线性瞬态动态模型相结合的水平面3自由度模型 Esso Bernici油船实验 构建的模型能较高精度刻画岸壁和河底对船舶运动的影响,其中船岸间距与船速之间呈现多项式关系,船岸间距相较于船速对船舶运动影响更为明显 [27] 简化MMG模型与稳态和瞬态响应方程相结合的水平面3自由度模型 KVLCC2基准船船模与潜艇标模SUBOFF船模 构建的模型可用于岸壁效应对船舶运动不确定性和稳定性分析,此外,浅水对模型参数影响明显,船岸距离和吃水误差的误差引起的系数偏差是岸壁效应水动力不确定度中的重要组成部分 [29] 靠离泊等低速航行 水平面3自由度MMG模型 缩尺度模型船Esso Osaka 基于CMA-ES辨识方法,利用船舶运动轨迹,能构建出船舶靠离泊低速下的MMG模型,该套针对船舶低速运动下的辨识建模方法依赖于模型的自由度以及训练数据量 [32]
下载: 导出CSV
表 3 参数估计算法对比分析
Table 3. Comparative analysis of parameter identification methods
算法类型参数估计算法 优点 缺点 代表文献 经典算法 LS 简单易实现 异常值敏感 [6] 应用广泛 不一致估计 NLS 目标函数近似线性化 辨识值波动不稳定 [34] 收敛快,易实现 局部最优 PLS 适于大数据、多变量
可克服多变量共线性问题
具有一定鲁棒性复杂非线性动态系统适用性较差 [35] MILS 具有一定鲁棒性 多新息矩阵求逆致计算量大 [36] 对一定输入维度量的系统收敛较快 难适用于输入维度大的复杂系统 HTNMILS 计算复杂度较低 鲁棒性有界 [37] 辨识精度较高 TMILS 克服多新息矩阵求逆问题 对模型不完整及环境干扰的不确定性影响敏感 [38] 易实现,且无需先知船舶模型结构 KF 具有一定鲁棒性
通用性较强需已知外部激励
线性化动态系统,难适用于非线性系统[39-40] EKF 具有一定鲁棒性
通用性较强
适用于非线性动态系统线性化处理忽略了高阶项,增大了计算误差
存在非局部采样和负半定协方差矩阵问题[14] UKF 计算过程非线性的同时保留了系统的非线性特性 鲁棒性有界 [41-42] 具有较高的模型参数估算精度 干扰未知下调参难 EHIF 具有一定鲁棒性 初值依赖,且但准确确定 [49] 适用于非线性动态系统 NGF 结构设计灵活,适用性强 初值依赖 [43] 辨识精度高 无法克服参数漂移 智能算法 GEBF-FNN 具有可解释的模型结构和并行学习能 大型复杂船舶运动建模问题存在维数灾难问题 [45] 适用于较为复杂的船舶运动辨识建模问题 IGA 适用于白噪声干扰动态系统 局部最优
难适用于有色噪声干扰下的辨识问题[48] LS-SVM 适用于小样本
凸优化转换,求解保证全局优化结果约束线性化牺牲掉了一定的辨识精度
不具有解的稀疏性
部分参数需合理优化[44] OTLSSVM 适用于小样本
凸优化转换,求解保证全局优化结果
核函数矩阵维数减少,计算量降低对非线性动态系统适用性有限
部分参数需合理优化[26] ε-SVM 适用于大样本问题
具有较好鲁棒性不敏感因子合理确定不易
参数漂移现象无法避免[51] 混合算法 EKF+GRGCLS 兼具二者的优点
对强非线性动态系统辨识精度较高EKF的缺点仍旧无法完全克服 [44] PSO+LS-SVM 适用于小样本
凸优化转换,求解保证全局优化结果
参数自适应优化约束线性化牺牲掉了一定的辨识精度
PSO局部最优无法完全克服[50] CV+ν-SVM 适用于非线性动态系统
参数优化简单易实现参数漂移现象无法避免
非线性问题处理能力受限[52]
下载: 导出CSV
-
[1] KOSOWATZ J. Sailing toward autonomy[J]. Mechanical Engineering, 2019, 141(9): 30-35. doi: 10.1115/1.2019-SEP1 [2] 吴青, 王乐, 刘佳仑. 自主水面货船研究现状与展望[J]. 智能系统学报, 2019, 14(1): 57-70. https://www.cnki.com.cn/Article/CJFDTOTAL-ZNXT201901005.htmWU Q, WANG L, LIU J L. Research status and prospects of autonomous surface cargo ships[J]. CAAI Transactions on Intelligent Systems, 2019, 14(1): 57-70. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-ZNXT201901005.htm [3] 周翔宇, 吴兆麟, 王凤武, 等. 自主船舶的定义及其自主水平的界定[J]. 交通运输工程学报, 2019, 19(6): 149-162. doi: 10.19818/j.cnki.1671-1637.2019.06.014ZHOU X Y, WU Z L, WANG F W, et al. Definition of autonomous ship and its autonomy level[J]. Journal of Traffic and Transportation Engineering, 2019, 19(6): 149-162. (in Chinese) doi: 10.19818/j.cnki.1671-1637.2019.06.014 [4] 张笛, 赵银祥, 崔一帆, 等. 智能船舶的研究现状可视化分析与发展趋势[J]. 交通信息与安全, 2021, 39(1): 7-16+34.ZHANG D, ZHAO Y X, CUI Y F, et al. A visualization analysis and development trend of intelligent ship studies[J]. 2021, 39(1): 7-16+34. (in Chinese) [5] 王雪刚. 基于支持向量机的四自由度船舶操纵运动建模研究[D]. 上海: 上海交通大学, 2014.WANG X G. On the modeling of ship manoeuvring motion in 4 degree of freedom based on support vector machines[D]. Shanghai: Shanghai Jiaotong University, 2014. (in Chinese) [6] ZHU M, HAHN A, WEN Y Q, et al. Optimized support vector regression algorithm-based modeling of ship dynamics[J]. Applied Ocean Research, 2019(90): 101842. [7] 王辉, 任俊生, 刘新召. 基于OpenMP的船舶操纵运动局部加权学习辨识建模[J]. 计算机应用研究, 2020, 37(增刊2): 173-175. https://www.cnki.com.cn/Article/CJFDTOTAL-JSYJ2020S2054.htmWANG H, REN J S, LIU X Z. OpenMP-based local weighted learning identification modeling of ship maneuvering motion[J]. Application Research of Computers, 2020, 37(S2): 173-175. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-JSYJ2020S2054.htm [8] LJUNG L. System identification[M]. Boston: Birkhäuser, 1998. [9] WANG Z, SOARES CARLOS G, ZOU Z. Optimal design of excitation signal for identification of nonlinear ship manoeuvring model[J]. Ocean Engineering, 2019(196): 106778. [10] 郑宇昕. 最优输入设计方法及其在飞行器参数辨识中的应用[D]. 长沙: 国防科技大学, 2018.ZHENG X Y. Optimal input design method and aircraft parameter identification[D]. Changsha: National University of Defense Technology, 2018. (in Chinese) [11] LEVIN M J. Optimal estimation of impulse response in the presence of noise[J]. IRE Transactions on Circuit Theory, 1960(7): 50-56. [12] XU H, HINOSTROZA M A, SOARES CARLOS G. Estimation of hydrodynamic coefficients of a nonlinear manoeuvring mathematical model with free-running ship model tests[J]. International Journal of Maritime Engineering, 2018(160): 213-225. [13] ZHU M, SUN W Q, HAHN A, et al. Adaptive modeling of maritime autonomous surface ships with uncertainty using a weighted LS-SVR robust to outliers[J]. Ocean Engineering, 2020(200): 107053. [14] PERERA L P, OLIVEIRA P, SOARES CARLOS G. System identification of vessel steering with unstructured uncertainties by persistent excitation maneuvers[J]. IEEE Journal of Oceanic Engineering, 2015, 41(3): 515-528. [15] HERRERO E R, GONZALEZ F J V. Two-step identification of non-linear manoeuvring models of marine vessels[J]. Ocean Engineering, 2012(53): 72-82. [16] WANG Z, ZOU Z, SOARES CARLOS G. Identification of ship manoeuvring motion based on nu-support vector machine[J]. Ocean Engineering, 2019(183): 270-281. [17] YOON H K, RHEE K P. Identification of hydrodynamic coefficients in ship maneuvering equations of motion by estimation-before-modeling technique[J]. Ocean Engineering, 2003, 30(18): 2379-2404. doi: 10.1016/S0029-8018(03)00106-9 [18] YEON S M, YEO D J, RHEE K P. Optimal input design for the identification of low-speed manoeuvring mathematical model[C]. International Conference on Marine Simulation and Ship Maneuverability(MARSIM2006), Terschelling, The Netherlands: MIWB, 2006. [19] SUTULO S, SOARES CARLOS G. Development of a multifactor regression model of ship maneuvering forces based on optimized captive-model tests[J]. Journal of Ship Research, 2006, 50(4): 311-333. doi: 10.5957/jsr.2006.50.4.311 [20] LEWIS E V. Principles of naval architecture second revision[J]. Jersey: SNAME, 1988(2): 152-157. [21] YASUKAWA H, YOSHIMURA Y. Introduction of MMG standard method for ship maneuvering predictions[J]. Journal of Marine Science and Technology, 2015, 20(1): 37-52. doi: 10.1007/s00773-014-0293-y [22] FOSSEN T I. Handbook of marine craft hydrodynamics and motion control[M]. Manhattan: John Wiley & Sons, 2011. [23] TZENG C Y, CHEN J F. Fundamental properties of linear ship steering dynamic models[J]. Journal of Marine Science and Technology, 1999, 7(2): 79-88. [24] LIU J, HEKKENBERG R, QUADVLIEG F, et al. An integrated empirical manoeuvring model for inland vessels[J]. Ocean Engineering, 2017(137): 287-308. [25] SUTULO S, SOARES CARLOS G. On the application of empiric methods for prediction of ship manoeuvring properties and associated uncertainties[J]. Ocean Engineering, 2019(186): 106111. [26] XU H, SOARES CARLOS G. Hydrodynamic coefficient estimation for ship manoeuvring in shallow water using an optimal truncated LS-SVM[J]. Ocean Engineering, 2019(191): 106488. [27] DU P, OUAHSINE A, SERGENT P. Influences of the separation distance, ship speed and channel dimension on ship maneuverability in a confined waterway[J]. Comptes Rendus Mécanique, 2018, 346(5): 390-401. doi: 10.1016/j.crme.2018.01.005 [28] TANG X, TONG S, HUANG G, et al. Numerical investigation of the maneuverability of ships advancing in the non-uniform flow and shallow water areas[J]. Ocean Engineering, 2020(195): 106679. [29] 刘晗. 船舶近岸壁航行操纵性水动力与运动稳定性研究[D]. 上海: 上海交通大学, 2017.LIU H. Manoeuvring hydrodynamics and stability of vessels navigating in proximity to the bank[D]. Shanghai: Shanghai Jiaotong University, 2017. (in Chinese) [30] FALTINSEN O M. Hydrodynamics of high-speed marine vehicles[M]. Cambridge, UK: Cambridge University Press, 2005. [31] ZHU M. Optimized support vector regression algorithm-based modeling of ship dynamic[D]. Oldenburg: Oldenburg University, 2019. [32] MIYAUCHI Y, MAKI A, UMEDA N, et al. System parameter exploration of ship maneuvering model for automatic docking/berthing using CMA-ES[J]. Journal of Marine Science and Technology, 2022, 27(2): 1065-1083. doi: 10.1007/s00773-022-00889-3 [33] 张心光. 基于船舶操纵性试验分析的辨识建模研究[D]. 上海: 上海交通大学, 2012.ZHANG X G. Identification modeling based on analysis of ship manoeuvring tests[D]. Shanghai: Shanghai Jiaotong University, 2012. (in Chinese) [34] CHEN C, RUIZ M T, DELEFORTRIE G, et al. Parameter estimation for a ship's roll response model in shallow water using an intelligent machine learning method[J]. Ocean Engineering, 2019(191): 106479. [35] SUN L P, SUN W B. Parameter identification of the non-linear rolling damping based on PLS regression technique[J]. Advanced Materials Research, 2013(779/780): 675-679. [36] 谢朔, 初秀民, 柳晨光, 等. 基于多新息最小二乘法的船舶操纵响应模型参数辨识[J]. 中国航海, 2017, 40(1): 73-78. https://www.cnki.com.cn/Article/CJFDTOTAL-ZGHH201701016.htmXIE S, CHU X M, LIU C G, et al. Parameter identification of ship maneuvering response model based on multi-innovation least squares algorithm[J]. Navigation of China, 2017, 40(1): 73-78. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-ZGHH201701016.htm [37] SONG C, ZHANG X, ZHANG G. Nonlinear identification for 4-DOF ship maneuvering modeling via full-scale trial data[J]. IEEE Transactions on Industrial Electronics, 2021, 69(2): 1829-1835. [38] ZHANG G, ZHANG X, PANG H. Multi-innovation auto-constructed least squares identification for 4 DOF ship manoeuvring modelling with full-scale trial data[J]. ISA Transactions, 2015(58): 186-195. [39] HAYES M N. Parametric identification of nonlinear stochastic systems applied to ocean vehicle dynamics[D]. Cambridge, USA: Massachusetts Institute of Technology, 1971. [40] HWANG W Y. Application of system identification to ship maneuvering[D]. Massachusetts Institute of Technology, 1980. [41] 秦操. 基于无迹卡尔曼滤波的船舶运动数学模型辨识[J]. 舰船科学技术, 2021, 43(1): 89-94. https://www.cnki.com.cn/Article/CJFDTOTAL-JCKX202101017.htmQIN C. Parameter identification for ship mathematical model based on unscented Kalman filter[J]. Ship Science and Technology, 2021, 43(1): 89-94. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-JCKX202101017.htm [42] ZHENG J, YAN D, YAN M, et al. An unscented Kalman filter online identification approach for a nonlinear ship motion model using a self-navigation test[J]. Machines, 2022, 10(5): 312-320. doi: 10.3390/machines10050312 [43] WANG S, WANG L, IM N, et al. Real-time parameter identification of ship maneuvering response model based on nonlinear Gaussian filter[J]. Ocean Engineering, 2022(247): 110471. [44] ARAKI M, SADAT-HOSSEINI H, SANADA Y, et al. Estimating maneuvering coefficients using system identification methods with experimental, system-based, and CFD free-running trial data[J]. Ocean Engineering, 2012(51): 63-84. [45] WANG N, ER M J, HAN M. Large tanker motion model identification using generalized ellipsoidal basis function-based fuzzy neural networks[J]. IEEE Transactions on Cybernetics, 2015, 45(12): 2732-2743. [46] LUO W. Parameter identifiability of ship manoeuvring mod-eling using system identification[J]. Mathematical Problems in Engineering, 2016(1): 1-10. [47] LUO W, LI X. Measures to diminish the parameter drift in the modeling of ship manoeuvring using system identification[J]. Applied Ocean Research, 2017(67): 9-20. [48] SUTULO S, SOARES CARLOS G. An algorithm for offline identification of ship manoeuvring mathematical models from free-running tests[J]. Ocean Engineering, 2014(79): 10-25. [49] SAJEDI Y, BOZORG M. Robust estimation of hydrodynamic coefficients of an AUV using Kalman and H∞ filters[J]. Ocean Engineering, 2019(182): 386-394. [50] XU H, SOARES CARLOS G. Vector field path following for surface marine vessel and parameter identification based on LS-SVM[J]. Ocean Engineering, 2016(113): 151-161. [51] JIANG Y, WANG X G, ZOU Z J, et al. Identification of coupled response models for ship steering and roll motion using support vector machines[J]. Applied Ocean Research, 2021(110): 102607. [52] WANG Z, ZOU Z, SOARES CARLOS G. Identification of ship manoeuvring motion based on nu-support vector machine[J]. Ocean Engineering, 2019(183): 270-281. [53] ISERMANN R, MUENCHHOF M. Identification of dynamic systems: An introduction with applications[M]. Berlin: Springer, 2011 [54] 任泽裕, 王振超, 柯尊旺, 等. 多模态数据融合综述[J]. 计算机工程与应用, 2021, 57(18): 49-64. https://www.cnki.com.cn/Article/CJFDTOTAL-JSGG202118006.htmREN Z Y, WANG Z C, KE Z W, et al. Survey of multimodal data fusion[J]. Computer Engineering and Applications, 2021, 57(18): 49-64. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-JSGG202118006.htm [55] 王文飒, 梁军, 陈龙, 等. 基于深度强化学习的协同式自适应巡航控制[J]. 交通信息与安全, 2019, 37(3): 93-100. doi: 10.3963/j.issn.1674-4861.2019.03.012WANG W F, LIANG J, CHEN L, et al. Collaborative adaptive cruise control based on deep reinforcement learning[J]. Journal of Transport Information and Safety, 2019, 37(3): 93-100. (in Chinese) doi: 10.3963/j.issn.1674-4861.2019.03.012 -

 点击查看大图
点击查看大图
计量
- 文章访问数: 1987
- HTML全文浏览量: 676
- PDF下载量: 243
- 被引次数: 0