

A Localization Method for Intelligent Vehicles Based on Semantic Map Representation Extracted from 3D Cloud Points
-
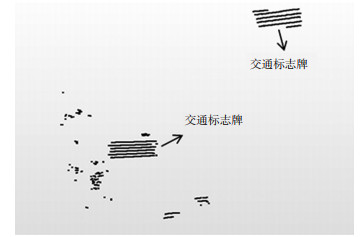
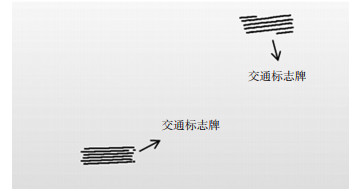
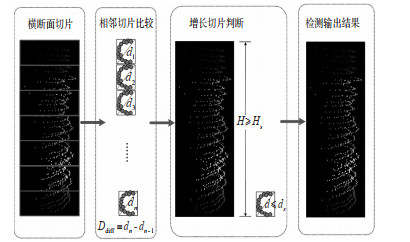
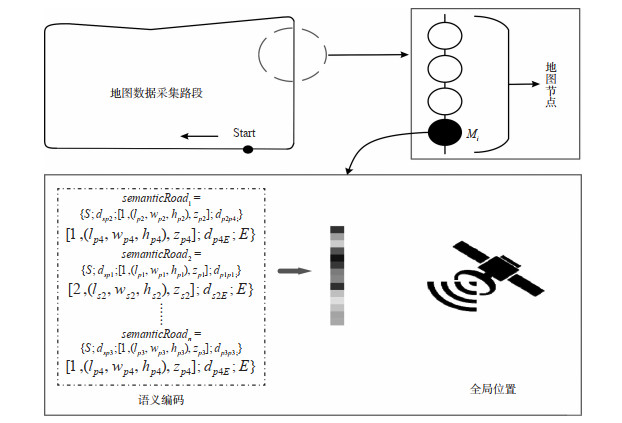
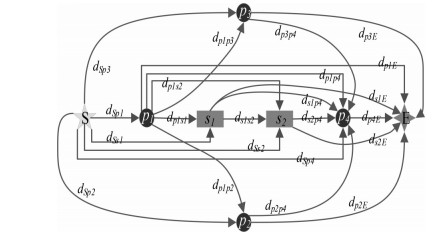
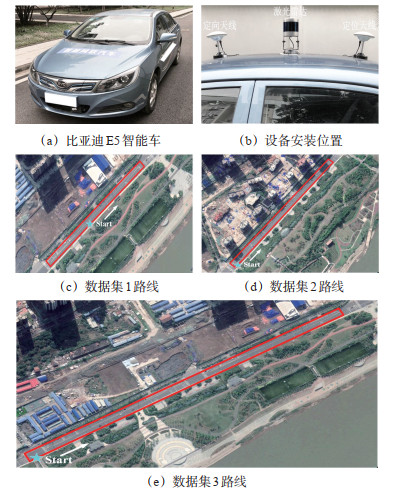
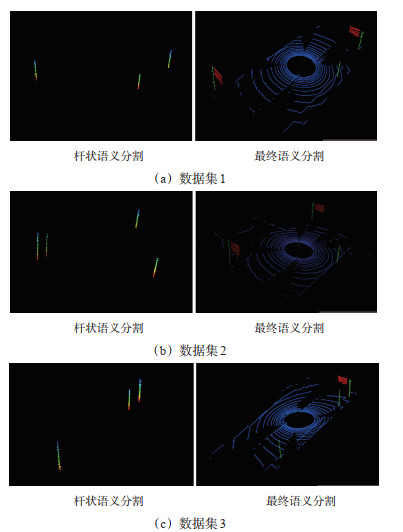
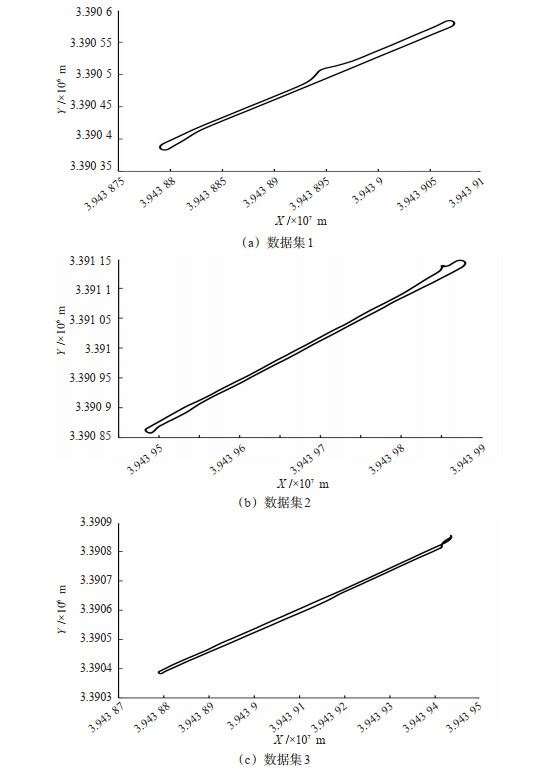
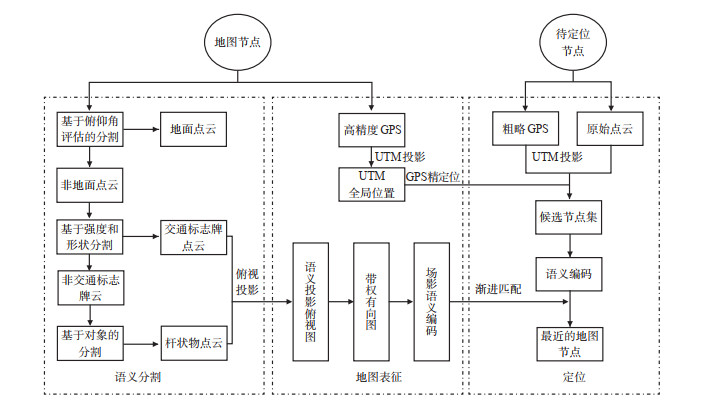
摘要: 为提高智能车节点定位准确率, 研究了基于3D点云语义地图表征的智能车定位方法。该方法分为3个部分: ①基于三维激光点云的语义分割, 包括地面分割, 交通标志牌分割和杆状语义目标分割; ②面向智能车的点云语义地图表征, 利用分割的语义目标投影, 生成带权有向图, 语义路, 语义编码, 再以语义编码和高精度GPS的全局位置组成语义地图表征模型; ③基于语义表征模型的智能车定位, 包括基于GPS匹配的粗定位和基于语义编码渐进匹配的节点定位。实验在3种长度不同、复杂度不同的道路场景下进行, 节点定位准确率分别为98.5%, 97.6%和97.8%, 结果表明所提出的定位方法节点定位准确率高、鲁棒性强且适用于不同的道路场景。Abstract: An intelligent vehicle localization method based on the semantic-map representation of 3D point clouds is proposed to improve the accuracy of node localization for intelligent vehicles. The method is divided into three parts. ① Semantic segmentation based on 3D laser point clouds includes segmentation of ground, traffic sign, and pole-shaped targets. ② Semantic-map representation for intelligent vehicles uses segmented targets to project. Directional projections with weight, semantic roads, and semantic coding are generated. The coding and global location from high-precision GPS make up the representation model. ③ Localization based on a semantic representation model includes coarse positioning from GPS matching and node localization from semantic coding matching. The experiments are performed in three road scenes with different lengths and complexities, and their localization accuracy is 98.5%, 97.6%, and 97.8%, respectively. The results show that the proposed method has high accuracy and strong robustness, suitable for different road scenes.
-
[1] 张帆, 胡钊政, 陈佳良, 等. 基于Wi-Fi指纹与视觉融合的室内交通定位[J]. 交通信息与安全, 2019, 37(3): 61-69+100. doi: 10.3963/j.issn.1674-4861.2019.03.008ZHANG Fan, HU Zhaozheng, CHEN Jialiang, et al. Indoor traffic positioning based on Wifi fingerprint and vision fusion[J]. Journal of Transport Information and Safety, 2019, 37(3): 61-69+100. (in Chinese). doi: 10.3963/j.issn.1674-4861.2019.03.008 [2] WOLCOTT R W, EUSTICE R M. Robust LiDAR localization using multiresolution Gaussian mixture maps for autonomous driving[J]. The International Journal of Robotics Research, 2017, 36(3): 292-319. doi: 10.1177/0278364917696568 [3] MUR-ARTAL R, TARDOS J D. ORB-SLAM2: An open-source SLAM system for monocular stereo and RGB-D cameras[J]. IEEE Transactions on Robotics, 2017, 33(5): 1255-1262. doi: 10.1109/TRO.2017.2705103 [4] 杨东凯, 寇艳红, 吴今培, 等. 智能交通系统中的地图匹配定位方法[J]. 交通运输系统工程与信息, 2003(3): 38-43. doi: 10.3969/j.issn.1009-6744.2003.03.008YANG Dongkai, KOU Yanhong, WU Jinpei, et al. A map-matching method in intelligent transport systems[J]. Journal of Transportation Systems Engineering and Information Technology, 2003, 3(3): 38-43. (in Chinese). doi: 10.3969/j.issn.1009-6744.2003.03.008 [5] ZHANG Ji, SINGH S. LOAM: LiDAR odometry and mapping in real-time[C]. Robotics: Science and Systems Conference, Berkeley, California, USA: University of California, Berkeley, 2014. [6] KOIDE K. A Portable 3D LIDAR-based system for long-term and wide-area people behavior measurement[J]. International Journal of Advanced Robotic Systems, 2019, 16(2): 1-13. http://www.researchgate.net/publication/331224140_A_Portable_3D_LIDAR-based_System_for_Long-term_and_Wide-area_People_Behavior_Measurement [7] THRUN S, MONTEMERLO M, Dahlkamp H, et al. Stanley: The robot that won the DARPA grand challenge[J]. Journal of Field Robotics, 2006, 23(9): 661-692. doi: 10.1002/rob.20147 [8] ZERMAS D, IZZAT I, PAPANIKOLOPOULOS N. Fast segmentation of 3D point clouds: A paradigm on LiDAR data for autonomous vehicle applications[C]. International Conference on Robotics and Automation(ICRA), Singapore: IEEE, 2017. [9] 彭泽民, 叶青. 自然环境下交通标志牌的检测与识别[J]. 电子测试, 2020(1): 45-47+92. https://www.cnki.com.cn/Article/CJFDTOTAL-WDZC202001015.htmPENG Zemin, YE Qing. Detection and identification of traffic signs in natural environment[J]. Electronic Test, 2020(1): 45-47+92. (in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-WDZC202001015.htm [10] 李游. 基于车载激光扫描数据的城市街道信息提取技术研究[D]. 武汉: 武汉大学, 2017.LI You. Research on street information detection from mobile laser scanning data in urban areas[D]. Wuhan: Wuhan University, 2017. (in Chinese). [11] KUZNETSOVA K, SAMSONOVICH A V. Semantic-map-base dapproach to designing an insight problem solving assistant[J]. Procedia Computer Science, 2018(123): 258-264. http://www.sciencedirect.com/science/article/pii/S1877050918300413/pdf?md5=139ba648e1b132f94671dd265cc50796&pid=1-s2.0-S1877050918300413-main.pdf [12] DUBE R, DUGAS D, STUMM E, et al. SegMatch: Segment based place recognition in 3D point clouds[C]. International Conference on Robotics and Automation(ICRA), Singapore: IEEE, 2017. [13] LIU Yu, PETILLOT Y, LANE D, et al. Global localization with object-level semantics and topology[C]. International Conference on Robotics and Automation(ICRA), Montreal, QC, Canada: IEEE, 2019. [14] CHEN X, MILIOTO A, PALAZZOLO E, et al. SuMa++: Efficient LiDAR-based semantic SLAM[C]. International Conference on Intelligent Robots and Systems(IROS), Macau, China: IEEE, 2019. [15] GOLOVINSKIY A, FUNKHOUSER T. Min-cut based segmentation of point clouds[C]. IEEE International Conference on Computer Vision Workshops, Kyoto, Japan: IEEE, 2009. [16] 刘亚坤, 李永强, 刘会云, 等. 基于改进RANSAC算法的复杂建筑物屋顶点云分割[J]. 地球信息科学学报, 2021, 23(8): 1497-1507. https://www.cnki.com.cn/Article/CJFDTOTAL-DQXX202108014.htmLIU Yakun, LI Yongqiang, LIU Huiyun, et al. An improved RANSAC algorithm for point cloud segmentation of complex building roofs[J]. Journal of Geo-information Science, 2021, 23(8): 1497-1507. (in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-DQXX202108014.htm [17] AI C, TSAI Y J. Critical assessment of an enhanced traffic sign detection method using mobile LiDAR and INS technologies[J]. Journal of Transportation Engineering, 2015, 141(5): 1-12. [18] PU Shi, RUTZINGER M, VOSSELMAN G, et al. Recognizing basic structures from mobile laser scanning data for road inventory studies[J]. ISPRS Journal of Photogrammetry and Remote Sensing, 2011, 66(6): S28-S39. doi: 10.1016/j.isprsjprs.2011.08.006 [19] TAO Qianwen, HU Zhaozheng, HUANG Gang, et al. LiDAR-only vehicle localization based on map generation[C]. Transportation Research Board(TRB), 2019 Annual Meeting, Washington, D. C., America: National Academies of USA, 2019. -

 下载:
下载:







 点击查看大图
点击查看大图
图(16) / 表(3)
计量
- 文章访问数: 997
- HTML全文浏览量: 459
- PDF下载量: 32
- 被引次数: 0