

A Correction Algorithm for Course Errors from the Gyrocompass Along the Northeast Channel of the Arctic
-
摘要: 针对商船上常用的指向仪器设备陀螺罗经在北极东北航道航行时由于高纬度带来的指向力矩变小而导致指向精度下降问题, 基于北极东北航道罗经历史数据, 考虑纬度和航向对航向误差的影响, 利用最小二乘法对GPS卫星罗经与陀螺罗经的航向误差进行多项式拟合, 建立并比对3种拟合模型, 遴选出均方误差最小的陀螺罗经航向修正模型; 当GPS信号异常时, 利用该模型对陀螺罗经航向误差进行一次修正; 修正后陀螺罗经航向精度保持在±2.0°内, 精度在±1°以内的修正率达88.4%;当GPS信号正常时, 在一次修正的基础上利用卡尔曼滤波进行二次修正, 修正后的陀螺罗经航向精度在±1.0°以内的修正率为98.9%, 精度在±0.5°以内的修正率达88.9%。Abstract: This work focuses on the problem of the decreased pointing accuracy caused by the reduced pointing torque in high latitudes when the gyrocompass commonly used on merchant ship is navigated in the Northeast Passage of the Arctic. Based on the historical data of the Northeast Passage of the Arctic, the influences of latitude and heading on heading error are considered. The least-square method is used to fit the heading error of GPS satellite compass and gyrocompass by the polynomial. Three fitting models are established to select the gyrocompass heading correction model with the smallest mean square error. When the GPS signal is abnormal, the model is used to correct the heading error of the gyrocompass. After correction, the accuracy of the gyrocompass heading remains within ±2.0°, and the correction rate within ±1° reaches 88.4%. When the GPS signal is normal, the Kalman filter is used for the second correction based on the first correction. The correction rate of the corrected gyrocompass heading accuracy within ±1.0° is 98.9%, and that within ±0.5° is 88.9%.
-
Key words:
- Northeast Passage of the Arctic /
- gyrocompass /
- heading error /
- data fitting /
- the least-square method /
- Kalman filter /
-

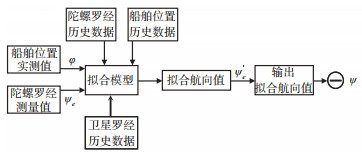
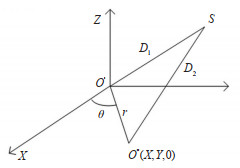
图 1 主、从天线基线在站心坐标系中的几何关系
Figure 1. Master and slave antenna baseline geometric elationships in the topocentric-coordinate system

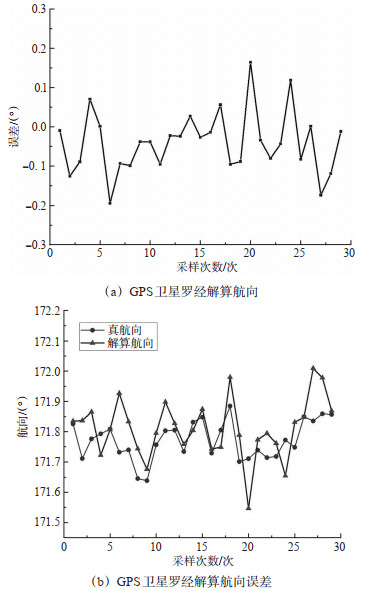
图 2 GPS卫星罗经解算航向及精度误差
Figure 2. Calculated GPS-satellite compass heading and accuracy error

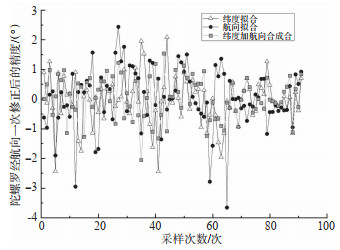
图 3 北极东北航道陀螺罗经航向一次修正
Figure 3. Firstly correction of gyrocompass in the Northeast Passage of the Arctic

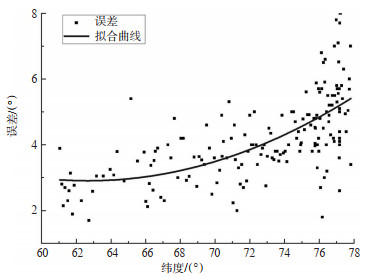
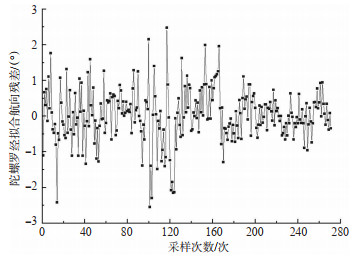
图 6 陀螺罗经纬度拟合模型残差
Figure 6. Residual error of the latitude fitting model of the gyrocompass

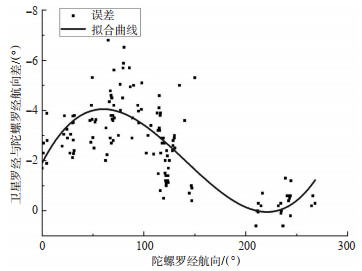
图 8 陀螺罗经航向拟合模型残差图
Figure 8. Residual error of the heading fitting model of the gyrocompass

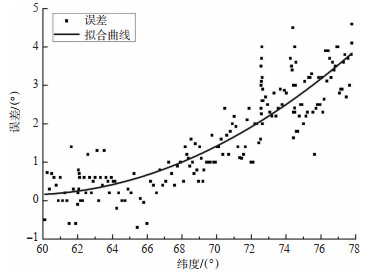
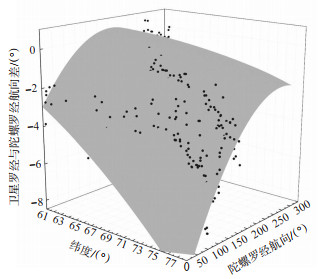
图 10 陀螺罗经纬度与航向合成拟合模型残差图
Figure 10. Residual error of the synthetic fitting model based on latitude and heading of the gyrocompass

图 12 基于卡尔曼滤波的陀螺罗经/GPS卫星罗经航向二次修正
Figure 12. Second correction of the heading of the gyrocompass/GPS satellite gyrocompass based on Kalman filter

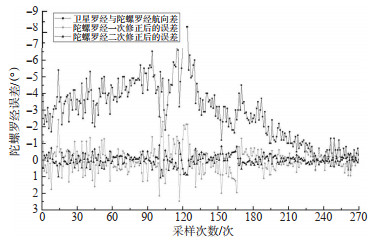
图 13 陀螺罗经航向误差修正对比图
Figure 13. Comparison of the heading error-correction of the gyrocompass
表 1 拟合模型理论均方根误差统计表
Table 1. Theoretical root-mean-square error statistics of the fitted model
拟合模型 均方根误差 纬度拟合 0.778 772 601 航向拟合 1.123 354 639 纬度与航向合成拟合 0.752 336 071  下载: 导出CSV
下载: 导出CSV
表 2 拟合模型应用精度均方根误差
Table 2. Root-mean-square error of the applied accuracy of the fitted model
拟合模型 均方根误差 纬度拟合 0.821 127 270 航向拟合 1.038 974 132 纬度与航向合成拟合 0.703 027 018
下载: 导出CSV
-
[1] 蔡梅江, 曹伟. 北极东北航道航行实践与安全性研究[J]. 交通信息与安全, 2020, 38(3): 77-83. doi: 10.3963/j.jssn.1674-4861.2020.03.010CAI Meijiang, CAO Wei. Navigation practice and safety research of Arctic northeast passage[J]. Journal of Transport Information and Safety, 2020, 38(3): 77-83. (in Chinese) doi: 10.3963/j.jssn.1674-4861.2020.03.010 [2] 吴建华, 王政, 陈宇里, 等. "永盛"轮穿越北极东北航道航行数据分析[J]. 航海技术, 2018(1): 19-22. https://www.cnki.com.cn/Article/CJFDTOTAL-HHJS201801012.htmWU Jianhua, WANG Zheng, CHEN Yuli, et al. Analysis ofnavigation data of "Yongsheng" crossing the northeast passage of Arctic Ocean[J] Marine Technology, 2018(1): 19-22. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-HHJS201801012.htm [3] 卞鸿巍, 马恒, 王荣颖, 等. 国内船用光纤陀螺罗经最新技术发展[J]. 海军工程大学学报, 2021, 33(3): 1-7. doi: 10.7495/j.issn.1009-3486.2021.03.001BIAN Hongwei, MA Heng, WANG Rongyin, et al. Latest technology development of marine fiber-optic gyrocompass in China[J]. Journal of Naval University of Engineering, 2021, 33(3): 1-7. (in Chinese) doi: 10.7495/j.issn.1009-3486.2021.03.001 [4] 李岩, 张英俊, 苗黎明, 等. GPS罗经实船试验及其在航海中的应用[J]. 航海技术, 2016(4): 36-39. https://www.cnki.com.cn/Article/CJFDTOTAL-HHJS201604014.htmLI Yan, ZHANG Yingjun, MIAO Liming, et al. GPS compass test on ship and its application in navigation[J]. Marine Technology, 2016(4): 36-39. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-HHJS201604014.htm [5] 关政军, 刘彤. 航海仪器[M]. 大连: 大连海事大学出版社, 2009.GUAN Zhengjun, LIU Tong. Navigation equipment[M]. Dalian: Dalian Marine University Press, 2009. (in Chinese) [6] 袁群哲, 周红进, 蒋永馨, 等. 电控陀螺罗经稳定过程研究与设计[J]. 中国航海, 2017, 40(1): 4-7+31. doi: 10.3969/j.issn.1000-4653.2017.01.002YUAN Qunzhe, ZHOU Hongjin, JIANG Yongxin, et al. Simulation of north-seeking process of electrically torqued gyrocompass[J]. Navigation of China, 2017, 40(1): 4-7+31. (in Chinese) doi: 10.3969/j.issn.1000-4653.2017.01.002 [7] 周红进, 兰国辉, 黄谦, 等. 电控陀螺罗经极区稳定性能研究[J]. 测控技术, 2020, 39(6): 18-22. https://www.cnki.com.cn/Article/CJFDTOTAL-IKJS202006012.htmZHOU Hongjing, LAN Guohui, HUANG Qian, et al. Polar stability performance of an electrically torqued gyrocompass[J]. Measurement & Control Technology, 2020, 39(6): 18-22. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-IKJS202006012.htm [8] 施闻明, 杨晓东. 陀螺罗经的航向效应标定与补偿[J]. 舰船科学技术, 2008(5): 89-91. https://www.cnki.com.cn/Article/CJFDTOTAL-JCKX200805034.htmSHI Wenming, YANG Xiaodong. Calibration and compen-sation for heading effect of gyrocompass[J]. Ship Science and Technology, 2008(5): 89-91. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-JCKX200805034.htm [9] 廉璞, 牟东, 叶海福, 等. 基于航向误差的捷联陀螺罗经标定方法[J]. 电光与控制, 2020, 27(2): 75-78. https://www.cnki.com.cn/Article/CJFDTOTAL-DGKQ202002017.htmLIAN Pu, MOU Dong, YE Haifu, et al. A calibration method of strap-down gyrocompass based on heading error[J]. Electronics Optics & Control, 2020, 27(2): 75-78. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-DGKQ202002017.htm [10] 夏卫星, 杨晓东. 基于最小二乘法的电罗经匀转向航向误差修正方法[J]. 船海工程, 2009, 38(4): 183-184+188. https://www.cnki.com.cn/Article/CJFDTOTAL-WHZC200904049.htmXIA Weixing, YANG Xiaodong. On error correction method of electromagnetic controlled gyrocompass's uniform s-teering course based on least square method[J]. Ship & Ocean Engineering, 2009, 38(4): 183-184+188. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-WHZC200904049.htm [11] 陈建国, 孙钟阜. 电控罗经的变传递系数阻尼方法[J]. 海军航空工程学院学报, 2010, 25(4): 388-390. doi: 10.3969/j.issn.1673-1522.2010.04.007CHEN Jianguo, SUN Zhongfu. Variable transfer coefficientdamp method of gyrocompass[J]. Journal of Naval Aeronautical and Astronautical University, 2010, 25(4): 388-390. (in Chinese) doi: 10.3969/j.issn.1673-1522.2010.04.007 [12] 陈建国, 李锋. 减小电控罗经误差随纬度变化的方法研究[J]. 舰船电子工程, 2014, 34(3): 65-67. https://www.cnki.com.cn/Article/CJFDTOTAL-JCGC201403018.htmCHEN Jianguo, LI Feng. Method of reducing gyrocompasserror variation with latitude[J]. Ship Electronic Engineering, 2014, 34(3): 65-67. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-JCGC201403018.htm [13] LIU Xixing, XU Xiaosu, LIU Yiting, et al. A fast and highaccuracy compass alignment method to SINS with azimuthaxis rotation[J]. Mathematical Problems in Engineering, 2013(1): 61. http://downloads.hindawi.com/journals/mpe/2013/524284.pdf [14] XU Bo, LIU Yang, SHAN Wei, et al. Error analysis and compensation of gyrocompass alignment for SINS on moving base[J]. Mathematical Problems in Engineering, 2014(2): 1-18. http://www.researchgate.net/publication/289233903_Error_analysis_and_compensation_of_in-motion_compass-circuit_alignment_for_SINS_based_on_equivalent_sensor_error [15] WEI Fengmei, ZHANG Jianpei, YANG Jing, et al. A novel gyrocompass alignment method under large azimuth misalignment angle[J]. Journal of Shanghai Jiaotong University(Science), 2015, 20(5). [16] SPIELVOGEL R A, WHITCOMB L L. Adaptive bias and attitude observer on the special orthogonal group for true-north gyrocompass systems: Theory and preliminary results[J]. The International Journal of Robotics Research, 2020, 39(2-3): 321-338. [17] 吴建华, 周鹏. 卫星罗经的原理及其应用[J]. 航海技术, 2007(3): 33-35. https://www.cnki.com.cn/Article/CJFDTOTAL-HHJS200703019.htmWU Jianhua, ZHOU Peng. The principle and application satellite compass[J]. Marine Technology, 2007(3): 33-35. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-HHJS200703019.htm [18] 贾小勇, 徐传胜, 白欣. 最小二乘法的创立及其思想方法[J]. 西北大学学报(自然科学版), 2006(3): 507-511. https://www.cnki.com.cn/Article/CJFDTOTAL-XBDZ200603040.htmJIA Xiaoyong, XU Chuansheng, BAI Xin. The invention and way of thinking on least squares[J]. Journal of Northwest University(Natural Science Edition), 2006(3): 507-511. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-XBDZ200603040.htm [19] 蔡泽辉. 稀疏锚节点下室内人员定位跟踪算法研究[D]. 徐州: 中国矿业大学, 2014.CAI Zehui. Research on indoor pedestrian positioning and tracking algorithms with sparse anchors[D]. Xuzhou: China University of Mining and Technology, 2014. (in Chinese) [20] 薛鸿印. 用GPS标校平台罗经方位安装误差与航向精度测量[J]. 现代防御技术, 2000(6): 47-51. https://www.cnki.com.cn/Article/CJFDTOTAL-XDFJ200006008.htmXUE Hongyin. Using GPS to correct platform compass azimuth installation error and measure course accuracy[J]. Modern Defence Technology, 2000(6): 47-51. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-XDFJ200006008.htm -



 点击查看大图
点击查看大图
计量
- 文章访问数: 1110
- HTML全文浏览量: 557
- PDF下载量: 27
- 被引次数: 0