

A Coordinated Control Method of Longitudinal Ship Speed Based on Model Predictive Control
-
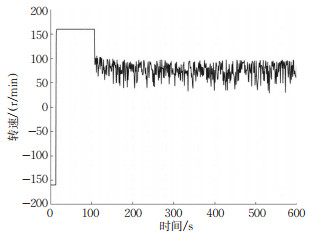
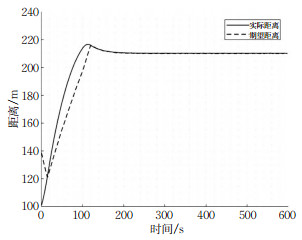
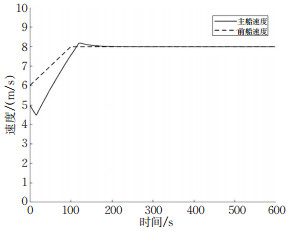
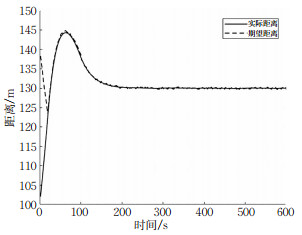
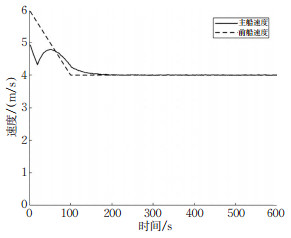
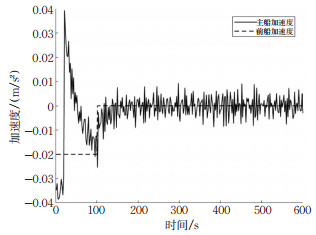
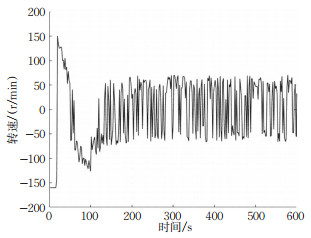
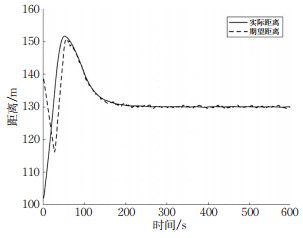
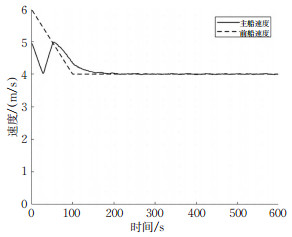
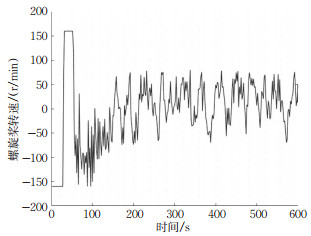
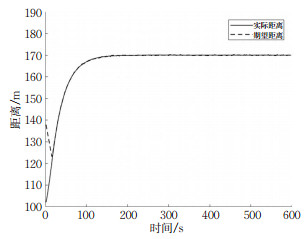
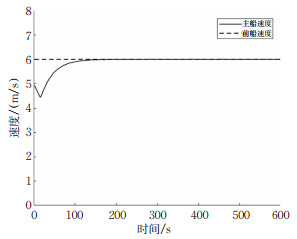
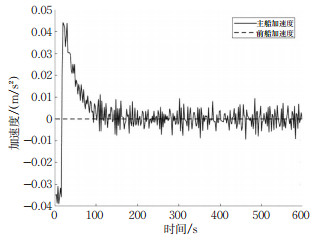
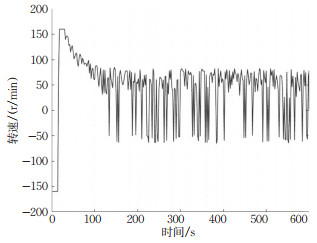
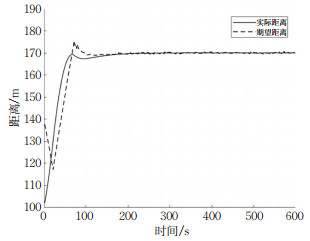
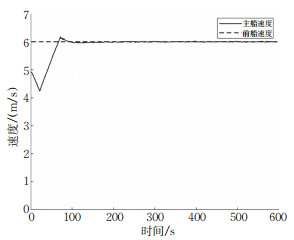
摘要: 多船协同航行在海事搜救、资源勘探、极地航运等领域中具有显著优势,其中纵向航速协同控制是实现船舶协同航行的关键。通过分析船舶螺旋桨转速、加速度与航速之间的关系,构建了考虑风力影响的船舶纵向动力模型,为实现前后船加速度与跟驰距离的关联,引用基于变时距策略的船舶间距模型。设计了考虑航速、加速度等多约束的多船航速控制目标函数,并利用模型预测控制方法实现了最优化问题的实时求解。通过Matlab进行仿真验证,结果表明,提出的基于模型预测控制方法的船舶纵向航速协同控制方法在前船加速、减速、匀速等工况下,后船均能实现对前船的精确稳定跟驰,其距离跟踪误差分别为0.092 5 m,0.192 8 m,0.166 2 m,与PID方法相比具有更好的收敛性、跟踪精度和抗干扰能力。Abstract: Multi-vessel cooperative navigation has significant advantages in maritime search and rescue, resource exploration, and polar shipping. Cooperative control of longitudinal speed is the key to realizing cooperative navigation of ships. A longitudinal dynamics model of the ship considering influences of wind is constructed by analyzing the relationship among ship propeller speed, acceleration, and speed. A ship spacing model based on the variable time-distance strategy is invoked to realize the correlation between the acceleration and following distance of the front and rear ships. After designing the multi-ship speed-control objective function considering multiple constraints such as speed and acceleration, the optimization problem is solved in real-time using the method. Finally, the simulation is verified by Matlab. The results show that the proposed cooperative control method of longitudinal ship speed, based on the model predictive control method, can stably follow the front ship under the working conditions of acceleration, deceleration, and uniform speed. Its distance tracking errors are 0.092 5, 0.192 8, and 0.166 2 m, respectively. Compared with the PID method, the proposed method has better convergence, tracking accuracy, and anti-interference ability.
-
表 1 仿真结果
Table 1. Simulation results
性能指标 前船做加速运动 前船做减速运动 前船做匀速运动 MPC PID MPC PID MPC PID 收敛速度/s 108 120 20 60 20 140 平均误差/m 2.114 5 3.369 2 0.814 8 1.574 7 0.692 5 2.325 8 收敛后的平均误差/m 0.092 5 0.163 6 0.192 8 0.244 1 0.166 2 0.277 4  下载: 导出CSV
下载: 导出CSV
-
[1] 周翔宇, 吴兆麟, 王凤武, 等. 自主船舶的定义及其自主水平的界定[J]. 交通运输工程学报, 2019, 19 (6): 149-162. https://www.cnki.com.cn/Article/CJFDTOTAL-JYGC201906016.htmZHOU Xiangyu, WU Zhaolin, WANG Fengwu, et al. Definition of autonomous ship and its autonomy level[J]. Journal of Traffic and Transportation Engineering, 2019, 19(6): 149-162. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-JYGC201906016.htm [2] 何延康, 张笛, 张金奋等. 海事安全研究发展动态: 第13届船舶导航与海上运输安全国际会议综述[J]. 交通信息与安全, 2019, 37 (6): 1-10. https://www.cnki.com.cn/Article/CJFDTOTAL-JTJS201906002.htmHE Yankang, ZHANG Di, ZHANG Jinfen, et al. Research trends of maritime safety: A review of transNav 2019 conference[J]. Journal of Transport Information and Safety, 2019, 37 (6): 1-10. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-JTJS201906002.htm [3] KUMARAWADU S, KUMARA K J C. On the speed control for automated surface vessel operation[C]. 3rd International Conference on Information and Automation for Sustainability, Australia, Melbourne: IEEE, 2007. [4] SHOJAEI K. Leader-follower formation control of underactuated autonomous marine surface vehicles with limited torque[J]. Ocean Engineering, 2015 (105) : 196-205. http://www.sciencedirect.com/science/article/pii/S0029801815002693 [5] SHOJAEI K. Observer-based neural adaptive formation control of autonomous surface vessels with limited torque[J]. Robotics and Autonomous Systems, 2016 (78) : 83-96. http://www.sciencedirect.com/science/article/pii/S0921889016000129 [6] 李娟, 马涛, 刘建华. 基于领航者的多UUV协调编队滑模控制[J]. 哈尔滨工程大学学报, 2018, 39 (2): 350-357. https://www.cnki.com.cn/Article/CJFDTOTAL-HEBG201802024.htmLI Juan, MA Tao, LIU Jianhua. Multi-UUV coordinated formation sliding mode control based on leader[J]. Journal of Harbin Engineering University, 2018, 39 (2): 350-357. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-HEBG201802024.htm [7] 王珍. 随机风浪下船舶航速自适应控制[J]. 舰船科学技术, 2018, 40 (8): 25-27. https://www.cnki.com.cn/Article/CJFDTOTAL-JCKX201808010.htmWANG Zhen. Research on ship speed adaptive control under stochastic wind wave[J]. Ship Scienceand Technology, 2018, 40 (8): 25-27. https://www.cnki.com.cn/Article/CJFDTOTAL-JCKX201808010.htm [8] 朱俊. 基于跟驰理论的内河航道通过能力计算模型[J]. 交通运输工程学报, 2009, 9 (5): 83-87. doi: 10.3321/j.issn:1671-1637.2009.05.015ZHU Jun. Calculation model of inland waterway transit capacity based on ship-following theory[J]. Journal of Traffic and Transportation Engineering, 2009, 9 (5): 83-87. (in Chinese) doi: 10.3321/j.issn:1671-1637.2009.05.015 [9] 明力, 刘敬贤, 王先锋. 超大型船舶安全纵向间距计算模型[J]. 中国航海, 2014, 37 (4): 40-43. doi: 10.3969/j.issn.1000-4653.2014.04.009MING Li, LIU Jingxian, WANG Xianfeng. Calculation model of safe longitudinal distance for very large vessels[J]. Navigationof China, 2014, 37 (4): 40-43. (in Chinese) doi: 10.3969/j.issn.1000-4653.2014.04.009 [10] 李振福, 孙悦, 韦博文". 冰上丝绸之路": 北极航线船舶航行安全的跟驰模型[J]. 大连海事大学学报, 2018, 44 (3): 22-27. https://www.cnki.com.cn/Article/CJFDTOTAL-DLHS201803006.htmLI Zhenfu, SUN Yue, WEI Bowen. The"Silk Road on Ice" -A model for following the safety of ship navigation in the Arctic route[J]. Journal of Dalian Maritime University, 2018, 44(3): 22-27. (in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-DLHS201803006.htm [11] HE Y, CIUFFO B, ZHOU Q, et al. Adaptive cruise control strategies implemented on experimental vehicles: A Review[C]. 9th IFAC Symposium on Advances in Automotive Control AAC 2019: Orléans, 2019. [12] LI S E, JIA Z, LI K, et al. Fast online computation of a model predictive controller and its application to fuel economy-oriented adaptive cruise control[J]. IEEE Transactions on Intelligent Transportation Systems, 2014, 16 (3): 1199-1209. http://ieeexplore.ieee.org/document/6899598 [13] HU B, LI J, YANG J, et al. Reinforcement learning approach to design practical adaptive control for a small-Scale intelligent vehicle[J]. Symmetry, 2019, 11 (9): 1139. doi: 10.3390/sym11091139 [14] KIM H, LEE T H, SONG Y, et al. Robust design optimisation of adaptive cruise controller considering uncertainties of vehicle parameters and occupants[J]. Vehicle System Dynamics, 2020, 58 (6): 987-1005. doi: 10.1080/00423114.2019.1627375 [15] 王文飒, 梁军, 陈龙, 等. 基于深度强化学习的协同式自适应巡航控制[J]. 交通信息与安全, 2019, 37 (3): 93-100. doi: 10.3963/j.issn.1674-4861.2019.03.012WANG Wensa, LIANG Jun, CHEN Long, et al. Collaborative adaptive cruise control based on deep reinforcement learning[J]. Journal of Transport Information and Safety, 2019, 37 (3): 93-100. (in Chinese) doi: 10.3963/j.issn.1674-4861.2019.03.012 [16] 赵树恩, 冷姚, 邵毅明. 车辆多目标自适应巡航显式模型预测控制[J]. 交通运输工程学报, 2020, 20 (3): 206-216. https://www.cnki.com.cn/Article/CJFDTOTAL-JYGC202003023.htmZHAO Shuen, LENG Yao, SHAO Yiming. Explicit model predictive control of multi-objective adaptive cruise of vehicle[J]. Journal of Traffic and Transportation Engineering, 2020, 20 (3): 206-216. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-JYGC202003023.htm [17] 黄菊花, 邹汉鹏, 刘明春. 考虑测量噪声的车辆自适应巡航控制系统纵向跟车研究[J]. 北京理工大学学报, 2020, 40 (3): 254-261. https://www.cnki.com.cn/Article/CJFDTOTAL-BJLG202003004.htmHUANG Juhua, ZHOU Hanpeng, LIU Mingchun. Research on the longitudinal tracking of adaptive cruise control system for vehicles considering of measurement noise[J]. Transactions of Beijing Institute of Technology. 2020, 40(3): 254-261. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-BJLG202003004.htm [18] 赵乾博. 考虑油耗及经济性的营运船舶定航线航速优化[D]. 哈尔滨: 哈尔滨工程大学, 2017.ZHAO Qianbo. Optimization of sailing speed of operating ship in fixed routes by considering fuel consumption and economy[D]. Harbin: Harbin Engineering University, 2017. (in Chinese) [19] 洪碧光. 船舶风压系数计算方法[J]. 大连海运学院学报, 1991 (2): 113-121. https://www.cnki.com.cn/Article/CJFDTOTAL-DLHS199102000.htmHONG Biguang. A method of calculating the wind coefficient of ships[J]. Journal of Dalian Marine College, 1991(2): 113-121. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-DLHS199102000.htm [20] 李国定, 古文贤. 螺旋桨推力系数KT值的数学表达[J]. 大连海运学院学报, 1991, 17 (3): 261-267. https://www.cnki.com.cn/Article/CJFDTOTAL-DLHS199103006.htmLI Guoding, GU Wenxian. On the method of the mathematical presentation of propeller thrust coefficient[J]. Journal of Dalian Marine College, 1991, 17 (3): 261-267. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-DLHS199103006.htm [21] 张丽. 纯电动汽车全速自适应巡航控制系统的研究[D]. 哈尔滨: 哈尔滨工业大学, 2017.ZHANG Li. Research on full speed adaptive cruise control system of pure electric vehicle[D]. Harbin: Harbin Institute of Technology, 2017. (in Chinese) -




 点击查看大图
点击查看大图

图(26) / 表(1)
计量
- 文章访问数: 881
- HTML全文浏览量: 373
- PDF下载量: 33
- 被引次数: 0