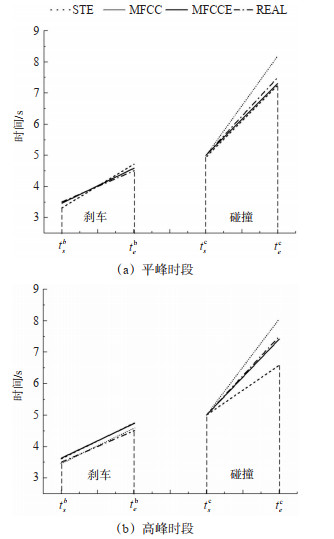
摘要: 针对公路隧道内交通事故的动态感知问题,在传统检测方法的基础上引入声学检测理论与方法,研究基于异常声音检测的隧道交通事故智能检测方法。通过分析短时能量(short term energy,STE)和梅尔倒谱系数(Mel-scale frequency cepstral coefficients,MFCC)检测方法在事故段特征表征以及精度干扰方面的缺陷,提出1种改进的融合特征MFCCE研究隧道环境下的交通事故检测。提取STE和MFCC特征并使用主成分分析(principal component analysis,PCA)进行特征融合得到新的融合特征MFCCE。以真实行车事故数据为基础,构建包含刹车与碰撞声的2段隧道噪声实验样本数据,分别对应早高峰时段(07:00—08:00)及平峰时段(12:00—13:00)的行车条件对隧道内的事故环境进行模拟分析,利用端点检测对所提方法进行验证并与其余2种方法进行对比分析。使用Pearson简单相关系数法作为最终的评价方法,通过该方法计算得到的相关系数r对比三种检测结果与原始样本的正相关相性。实验结果表明:STE在平峰及早高峰时段的相关系数分别为0.933和0.988;MFCC在平峰及早高峰时段的相关系数均为0.998;而无论在平峰还是早高峰时段,MFCCE的相关系数(0.999)均高于另外其他2种检测方法。MFCCE的平均相关系数相比于其他2种检测方法(STE、MFCC)分别提高了3.95%和1.00%。